文章目录
- 一.ros的安装
- 1.ros的一键安装:
- 2.ros的验证是否安装成功
- 3.安装导航必备的库:
- 二.VScode的配置
- 1.安装ros插件
- 2.安装cmake插件
- 三.VScode的简单使用
- 1.快速注释:
- 四.pycharm的安装
一.ros的安装
1.ros的一键安装:
wget http://fishros.com/install -O fishros && . fishros
参考网址:https://fishros.org.cn/forum/topic/20/%E5%B0%8F%E9%B1%BC%E7%9A%84%E4%B8%80%E9%94%AE%E5%AE%89%E8%A3%85%E7%B3%BB%E5%88%97?lang=zh-CN
不知道选择什么的情况下,一路默认选择【1】选项即可。
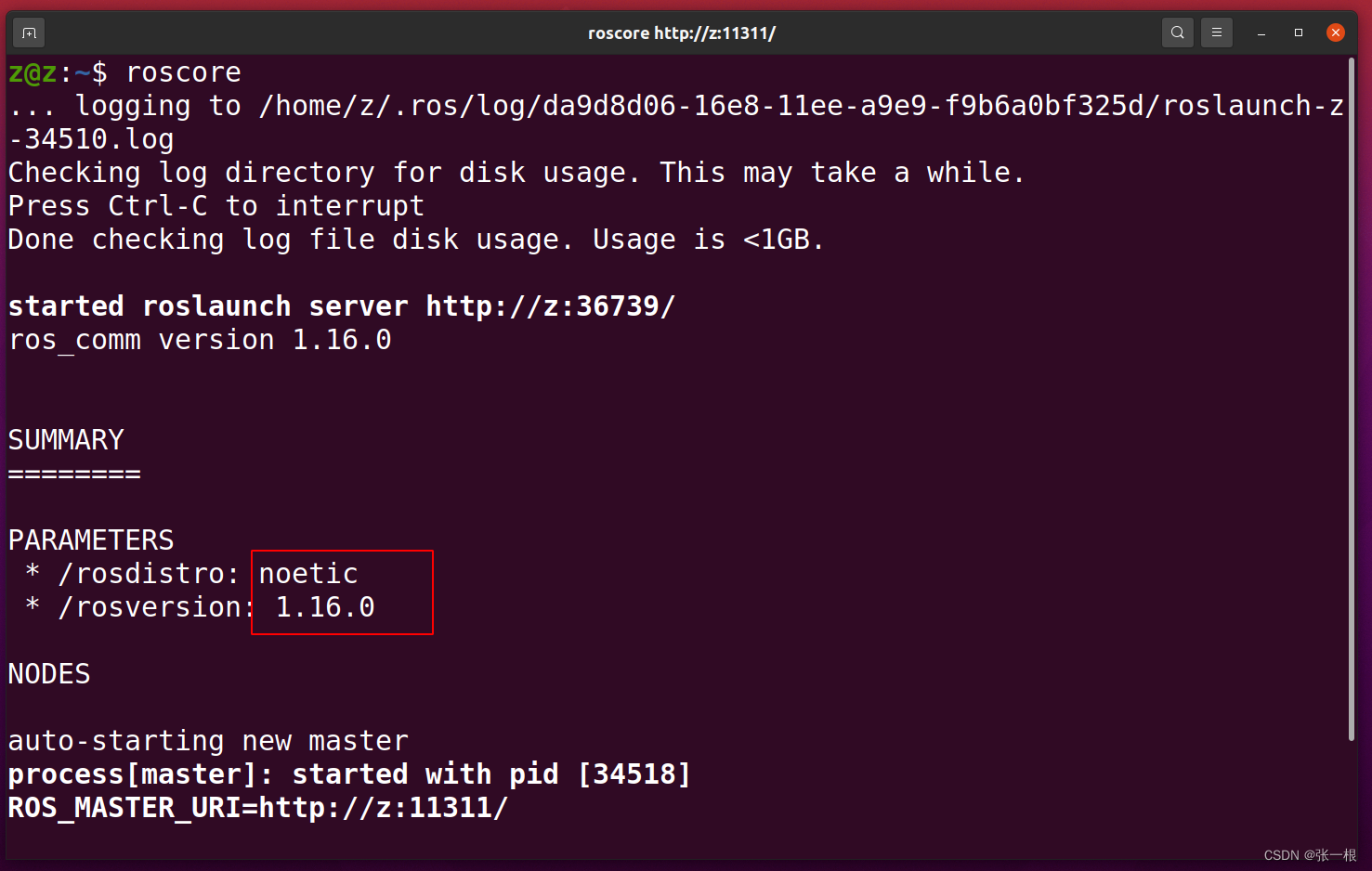
2.ros的验证是否安装成功
在终端输入,启动ros核心
roscore
显示下图,表面安装成功
3.安装导航必备的库:
sudo apt-get install ros-noetic-ackermann-msgs
sudo apt-get install ros-noetic-navigation
sudo apt-get install ros-noetic-openslam-gmapping
sudo apt-get install ros-noetic-geographic-info
sudo apt-get install ros-noetic-controller-manager
sudo apt-get install ros-noetic-gazebo-ros-control
sudo apt-get install ros-noetic-effort-controllers
sudo apt-get install ros-noetic-joint-state-controller
sudo apt-get install ros-noetic-position-controllers
sudo apt-get install ros-noetic-teb-local-planner
sudo apt-get install ros-noetic-serial ---串口需要的包
sudo apt install ros-noetic-rviz-imu-plugin ---imu展示数据时用到
二.VScode的配置
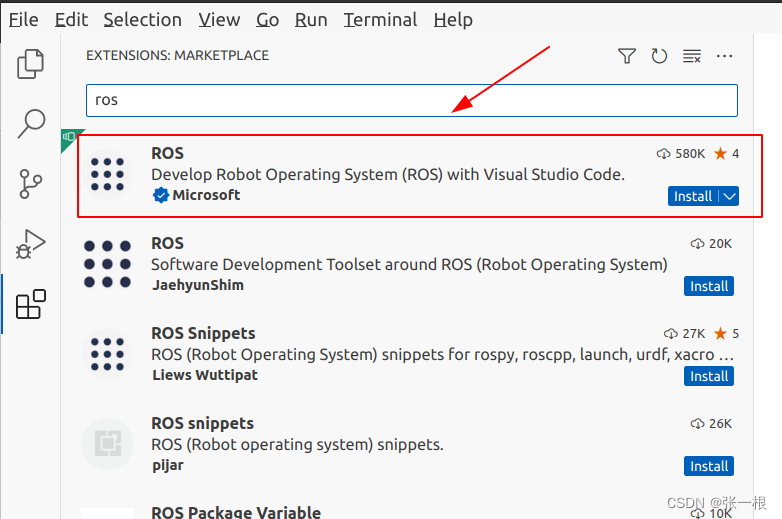
1.安装ros插件
安装Microsoft出品的ROS插件,顺带安装了C/C++ 和 python的插件
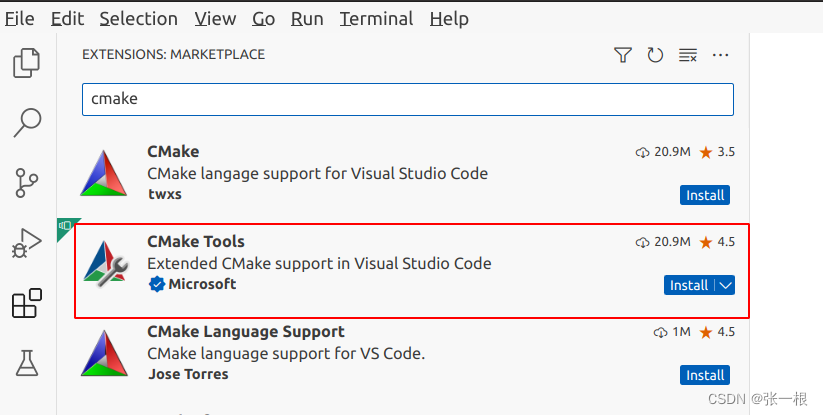
2.安装cmake插件
同样安装Microsoft出品的Cmake Tools工具,顺便安装了第一个CMake工具。
三.VScode的简单使用
1.快速注释:
ctr+/
四.pycharm的安装
参考:https://blog.csdn.net/thy0000/article/details/122877604