LabVIEW开发牵引控制动态仿真器
车辆牵引力控制包括轮胎在横向和纵向上的牵引力控制,以获得所需的车辆运动。决定轮胎牵引力的力来自路面和轮胎之间的相互作用,它们分解为两个组成部分:一个在横向,另一个在纵向。第一个组件取决于轮胎打滑角,可通过转向角进行控制。本文将考虑的纵向力取决于轮胎和路面之间的粘附系数。车轮打滑实际上是需要确定以找出摩擦系数值的度量。这是轮速和车速的非线性函数。由于纵向力和滑移比之间的依赖关系,如果实施车轮打滑控制,则可以控制车辆的牵引力。
汽车领域有很多应用,目前正在开发这些应用,以提高车辆的安全性、安全性和舒适性。已经上市并且可以提供车轮打滑控制的产品之一是牵引力控制系统(TCS)。该系统旨在帮助驾驶员在遇到摩擦系数较小的道路区域时不会失去抓地力和隐含的车辆控制。这是电子稳定程序(ESP)的次要功能,其中还包括防抱死制动系统(ABS)。当节气门输入和发动机扭矩的值不适应道路路面条件时,TCS被激活。当该系统的计算机检测到一个或多个车轮以比其他车轮更高的速度旋转时,它会向电子控制单元(ECU)发送命令,以对牵引力差的车轮施加制动力。这样,来自具有小抓地力的车轮的扭矩通过差速器传递到对面的车轮。牵引系统被广泛研究,并且有许多控制方法。考虑到该系统需要是一个具有实时动作的主动系统,具体取决于路况和其他外部扰动,因此它主要用于电动汽车(EV)。EV的响应时间比内燃机车(ICEV)短。
项目设计了一种针对独立电驱动电动汽车TCS开发的LabVIEW动态模拟器。一个由电力牵引电机直接驱动的车轮模型用于推导控制算法和数值模拟。该模拟器使用两种控制算法:最大可传递扭矩估计和滑模控制,将用于分析与每种算法一致的工厂行为。之所以选择实验室视图来构建应用程序,是因为它具有强大的处理和数据操作能力,并且易于为用户创建图形界面。动态模拟器既用于测试控制算法,也用于比较其性能。其他控制器也可以添加不同的控制算法。
为了开发电动汽车的TCS,我们考虑了一个车轮的打滑控制。作为控制算法,我们首先选择了一种基于模型的方法,该方法仅考虑车轮的动力学,没有静态滑移摩擦关系,将防滑控制转换为最大可传递扭矩控制。考虑到不确定的路况,我们其次使用了滑动模式控制算法。
动态模拟器及其三个组件被创建为实验室视图软件应用程序。这应该用于研究和开发,以实现与市场上已有的系统相比更可靠的实际控制系统。借助实验室视图功能生成ANSIC代码,可以使用应用程序的算法通过专用于此功能的电子控制单元(ECU)实时控制车辆的牵引系统。
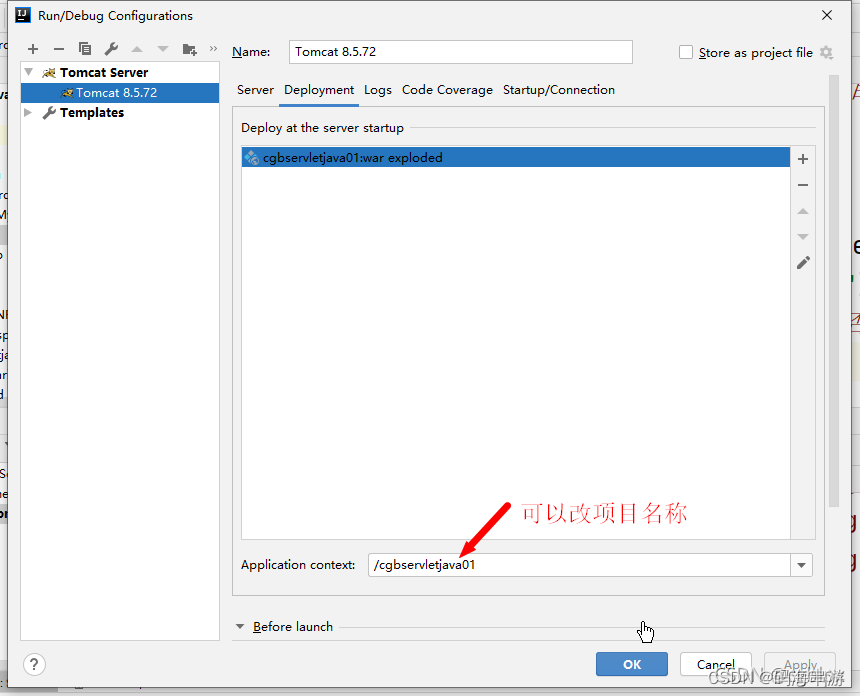
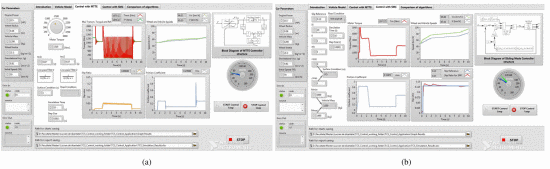
该动态模拟器具有图形界面,通过该界面可以设置车辆参数,路面状况,电机扭矩和其他措施。该接口有五个部分,其中分别表示基于MTTE部分的TCS和分别表示带有SMC的TCS。
对于“车辆模型”部分,可以设置以下特定输入参数:路面状况以及应用于模型输入的电机扭矩。重要测量值(输入扭矩、车轮和车速、滑移比和摩擦系数)的演变可以在四个指示器上以图形形式观察到。
控制结构仿真的结果用四个图表表示。
此实验室视图模拟器的增强功能可能是实现从Excel文档中自动读取每个控制循环的特定参数集。用户将有可能在最后分析结果并获得更好的参数证据。
考虑到NI设备种类繁多,该仿真器在LabVIEW中实现的事实可能导致有机会用真实模型替换模拟车辆模型,这有助于在未来项目中实时实施。