文章目录
- 自旋锁的概念
- 什么是自旋锁?
- 自旋锁的API函数(一)
- 自旋锁的使用步骤
- 其他自旋锁API函数(二)
- 自旋锁的注意事项
- 内核中自旋锁的实例
- 自旋锁死锁
- 写代码
- 临界区在哪?
- 最简单的实现逻辑
- 完整实现
自旋锁的概念
什么是自旋锁?
自旋锁是为了实现保护共享资源提出的一种锁机制,也是内核中比较常见的锁机制。自旋锁是以“原地等待”的方式解决资源冲突。即当线程A获取到自旋锁以后,此时线程B也想获取到自旋锁。但是线程B获取不到,只能“原地打转”(仍然占用CPU,不会休眠),不断尝试获取自旋锁,直到获取成功,然后才退出循环。
只有一个厕所,A想去厕所,B已经在厕所了,所以A只能在外面等待B,知道B上完厕所出来,A才能进去上厕所。
自旋锁的API函数(一)
| 函数 | 描述 |
|---|---|
| DEFINE_SPINLOCK(spinlock_t *lock) | 定义并初始化一个变量 |
| int spin_lock_init(spinlock_t *lock) | 初始化自旋锁 |
| void spin_lock(spinlock_t *lock) | 获取自旋锁,也叫做加锁 |
| void spin_unlock(spinlock_t *lock) | 释放自旋锁,也叫做解锁 |
| int spin_trylock(spinlock_t *lock) | 尝试获取自旋锁,如果没有获取到就返回0 |
| int spin_is_locked(spinlock_t *lock) | 检查自旋锁是否被获取,如果没有被获取就返回非0,否则返回0 |
自旋锁的使用步骤
- 在访问临界资源的时候先申请自旋锁
- 获取到自旋锁以后就进入临界区,获取不到自旋锁就“原地等待”
- 退出临界区的时候要释放自旋锁
其他自旋锁API函数(二)
| 函数 | 描述 |
|---|---|
| void spin_lock_irq(spinlock_t *lock) | 关闭中断并获取自旋锁 |
| void spin_unlock_irq(spinlock_t *lock) | 打开中断并释放自旋锁 |
| void spin_lock_irqsave(spinlock_t *lock, unsigned long flags) | 保存中断状态,关闭中断并获取自旋锁 |
| void spin_unlock_irqrestore(spinlock_t *lock, unsigned long flags) | 恢复之前保存的中断状态,打开中断并释放自旋锁 |
| void spin_lock_bh(spinlock_t *lock) | 关闭下半部,获取自旋锁 |
| void spin_unlock_bh(spinlock_t *lock) | 打开下半部,获取自旋锁 |
自旋锁的注意事项
- 由于自旋锁会“原地等待”,因为“原地等待”会继续占用CPU,会消耗CPU资源。所以锁的时间不能太长,也就是临界区的代码不能太多。
- 在自旋锁保护的临界区里面不能调用可能会导致线程休眠的函数,否则可能会发生死锁。
- 自旋锁一般是用在多核的SOC上面。
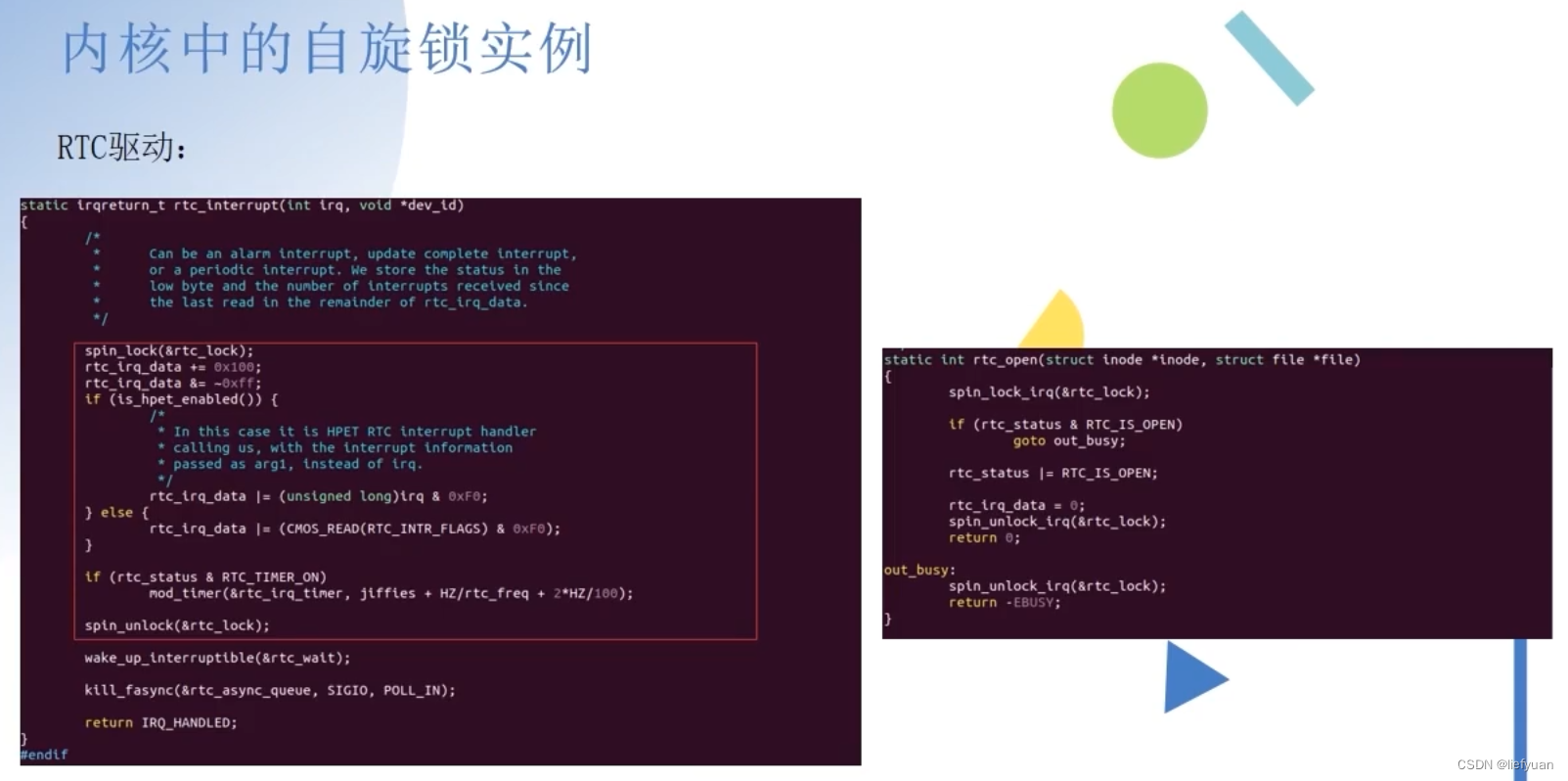
内核中自旋锁的实例
自旋锁死锁
在多核CPU或者支持抢占的单核CPU中,被自旋锁保护的临界区不能调用任何能够引起睡眠或者阻塞的函数,否则可能会发生死锁。
使用自旋锁会禁止抢占。比如在单核CPU中,A进程获取到自旋锁以后暂时关闭内核抢占,如果A进程此时进入了休眠(放弃了CPU的使用权),B进程此时也想获取到自旋锁,但是此时自旋锁被进程A持有,而且此时CPU的抢占被禁止了。因为是单核,进程B就无法被调度出去,只能在“原地旋转”等在锁被A释放。但是进程A无法运行,锁也就无法释放。死锁就发生了。
多核CPU不会发生上面的情况。因为其他的核会调度其他的进程。
当进程A获取到自旋锁以后,如果产生了中断,并且在中断里面也要访问共享资源(中断里面可以用自旋锁),此时中断里面无法获取到自旋锁,只能“原地旋转”,产生死锁。为了避免这种情况发生,可以使用spin_lock_irqsave等API来禁止中断并获取自旋锁。
写代码
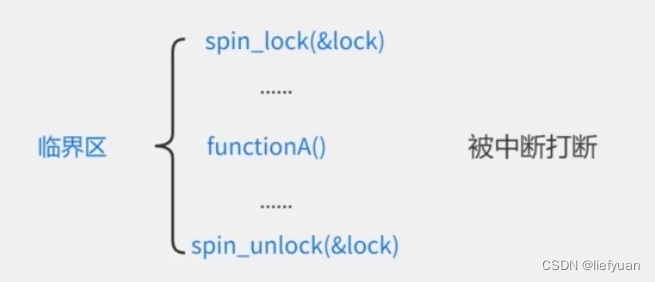
临界区在哪?
...
static spinlock_t spinlock;
static int flag = 1;
int misc_open(struct inode *inode,struct file *file)
{
spin_lock(&spinlock);
/***********临界区开始***********/
/**********临界区结束***********/
spin_unlock(&spinlock);
printk("hello misc_open\n ");
return 0;
}
...
如上,在加自旋锁和解自旋锁中间的区域就是“临界区域”。
最简单的实现逻辑
static spinlock_t spinlock;
static int flag = 1;
int misc_open(struct inode *inode,struct file *file)
{
spin_lock(&spinlock);
if(flag != 1) // 第一次程序进来不会有任何问题
{
spin_unlock(&spinlock);
return -EBUSY;
}
flag = 0; // 第一次进来的程序会置该标志位,让后面的程序无法进来。
spin_unlock(&spinlock);
printk("hello misc_open\n ");
return 0;
}
int misc_release(struct inode *inode,struct file *file)
{
spin_lock(&spinlock);
if(flag != 1)
flag = 1;
spin_unlock(&spinlock);
printk("hello misc_relaease bye bye \n ");
return 0;
}
- 如上,这是一个设备节点的驱动,第一次程序A打开了该驱动是可以顺利打开的不会有问题,并且打开后就会把全局变量
flag = 0,这样其他程序再想打开该驱动就会失败并返回错误。 - 程序A用完了该驱动就会将
flag = 1,从而后面的程序可以打开该驱动。 - 逻辑相当简单,就是操作与判断
flag的逻辑必须在临界区里面执行。
一种特殊情况:
- 程序A打开了驱动,代码跑到了
flag = 0;也就是flag还没有完全赋值的时候,来了程序B也要打开驱动,由于自旋锁锁定机制,它只能在临界区外spin_lock(&spinlock); //在这里等待等待。直到程序A跑完临界区,flag也被设置为了1,然后程序B还是无法打开驱动了!目的就达到了。
完整实现
led.c
#include <linux/init.h> //初始化头文件
#include <linux/module.h> //最基本的文件,支持动态添加和卸载模块。
#include <linux/miscdevice.h> //包含了miscdevice结构的定义及相关的操作函数。
#include <linux/fs.h> //文件系统头文件,定义文件表结构(file,buffer_head,m_inode等)
#include <linux/uaccess.h> //包含了copy_to_user、copy_from_user等内核访问用户进程内存地址的函数定义。
#include <linux/io.h> //包含了ioremap、iowrite等内核访问IO内存等函数的定义。
#include <linux/kernel.h> //驱动要写入内核,与内核相关的头文件
#include <linux/atomic.h>
#include <asm/atomic.h>
#define GPIO_DR 0xfdd60000 //LED物理地址,通过查看原理图得知
unsigned int *vir_gpio_dr; //存放映射完的虚拟地址的首地址
static spinlock_t spinlock;
static int flag = 1;
int misc_open(struct inode *inode,struct file *file)
{
spin_lock(&spinlock);
if(flag != 1)
{
spin_unlock(&spinlock);
return -EBUSY;
}
flag = 0;
spin_unlock(&spinlock);
printk("hello misc_open\n ");
return 0;
}
int misc_release(struct inode *inode,struct file *file)
{
spin_lock(&spinlock);
flag = 1;
spin_unlock(&spinlock);
printk("hello misc_relaease bye bye \n ");
return 0;
}
ssize_t misc_read (struct file *file, char __user *ubuf, size_t size, loff_t *loff_t)
{
printk("misc_read\n ");
return 0;
}
ssize_t misc_write (struct file *file, const char __user *ubuf, size_t size, loff_t *loff_t)
{
/*应用程序传入数据到内核空间,然后控制蜂鸣器的逻辑,在此添加*/
// kbuf保存的是从应用层读取到的数据
char kbuf[64] = {0};
// copy_from_user 从应用层传递数据给内核层
if(copy_from_user(kbuf,ubuf,size)!= 0)
{
// copy_from_user 传递失败打印
printk("copy_from_user error \n ");
return -1;
}
//打印传递进内核的数据
//printk("kbuf is %d\n ",kbuf[0]);
if(kbuf[0]==1) //传入数据为1 ,LED亮
{
*vir_gpio_dr = 0x80008000;
}
else if(kbuf[0]==0) //传入数据为0,LED灭
*vir_gpio_dr = 0x80000000;
return 0;
}
//文件操作集
struct file_operations misc_fops={
.owner = THIS_MODULE,
.open = misc_open,
.release = misc_release,
.read = misc_read,
.write = misc_write,
};
//miscdevice结构体
struct miscdevice misc_dev = {
.minor = MISC_DYNAMIC_MINOR,
.name = "hello_misc",
.fops = &misc_fops,
};
static int misc_init(void)
{
int ret;
//注册杂项设备
ret = misc_register(&misc_dev);
if(ret<0)
{
printk("misc registe is error \n");
}
printk("misc registe is succeed \n");
//将物理地址转化为虚拟地址
vir_gpio_dr = ioremap(GPIO_DR,4);
if(vir_gpio_dr == NULL)
{
printk("GPIO_DR ioremap is error \n");
return EBUSY;
}
printk("GPIO_DR ioremap is ok \n");
return 0;
}
static void misc_exit(void){
//卸载杂项设备
misc_deregister(&misc_dev);
iounmap(vir_gpio_dr);
printk(" misc gooodbye! \n");
}
module_init(misc_init);
module_exit(misc_exit);
MODULE_LICENSE("GPL");
Makefile
obj-m += led.o
KDIR =/home/liefyuan/Linux/rk356x_linux/kernel
PWD ?= $(shell pwd)
all:
make -C $(KDIR) M=$(PWD) modules modules ARCH=arm64 CROSS_COMPILE=/usr/local/arm64/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin/aarch64-linux-gnu-
clean:
rm -rf modules.order *.o workqueue.o Module.symvers *.mod.c *.ko
编译模块:
$ export ARCH=arm64
$ export CROSS_COMPILE=aarch64-linux-gnu-
$ make
测试应用:
app.c
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
int main(int argc,char *argv[])
{
int fd;
char buf[64] = {0};//定义buf缓存
char val[1];
//打开设备节点
fd = open("/dev/hello_misc",O_RDWR);
if(fd < 0)
{
//打开设备节点失败
perror("open error \n");
return fd;
}
sleep(10);
close(fd);
return 0;
}
app2.c
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
int main(int argc,char *argv[])
{
int fd;
char buf[64] = {0};//定义buf缓存
char val[1];
//打开设备节点
fd = open("/dev/hello_misc",O_RDWR);
if(fd < 0)
{
//打开设备节点失败
perror("open error \n");
return fd;
}
//把缓冲区数据写入文件中
while(1)
{
val[0] = 1;
write(fd, val, sizeof(val));
sleep(1);
val[0] = 0;
write(fd, val, sizeof(val));
sleep(1);
}
close(fd);
return 0;
}
编译:
aarch64-linux-gnu-gcc app.c -o app.armelf
aarch64-linux-gnu-gcc app2.c -o app2.armelf
测试:
[root@RK356X:/opt]# insmod led.ko
[ 787.424679] misc registe is succeed
[ 787.425141] GPIO_DR ioremap is ok
[root@RK356X:/opt]# ./app.armelf &
[root@RK356X:/opt]# ./app2.armelf
open error
: Device or resource busy
[root@RK356X:/opt]# ./app2.armelf [ 805.822972] hello misc_open
[ 805.822972]
[ 815.824861] hello misc_relaease bye bye
[ 815.824861]
[ 818.127234] hello misc_open
[ 818.127234]
- 实现的逻辑:程序app运行起来以后会占用驱动10秒钟,这十秒内app2是无法打开驱动的,直到app释放掉自旋锁以后才可以被app2打开。