首先先了解一下SRR模式下的chirp配置是什么样子,SRR的chirp的配置文件可以看(位置位于toolbox中)C:\mmwave_automotive_toolbox_3_1_0__win\mmwave_automotive_toolbox_3_1_0\labs\lab0002_short_range_radar\src\commonsrr_config_chirp_design_SRR80.h

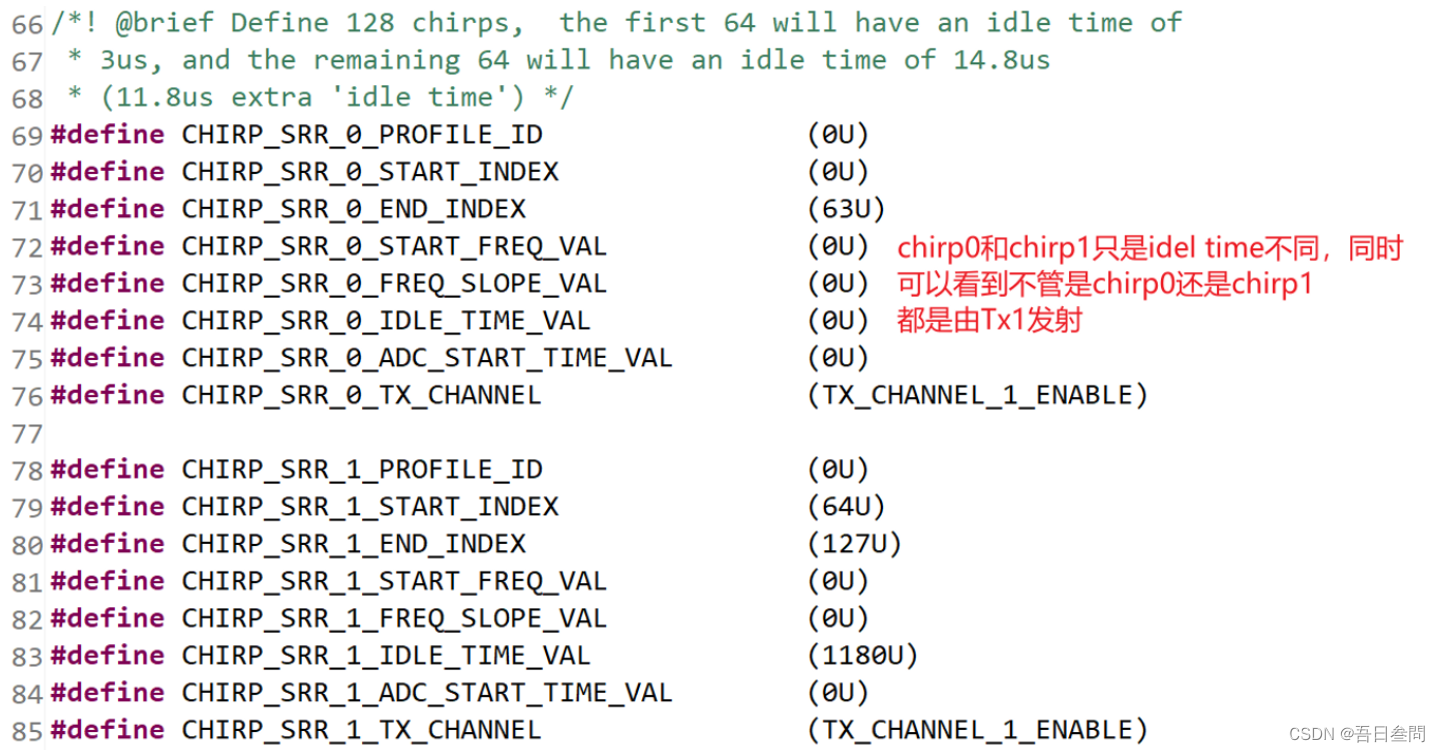
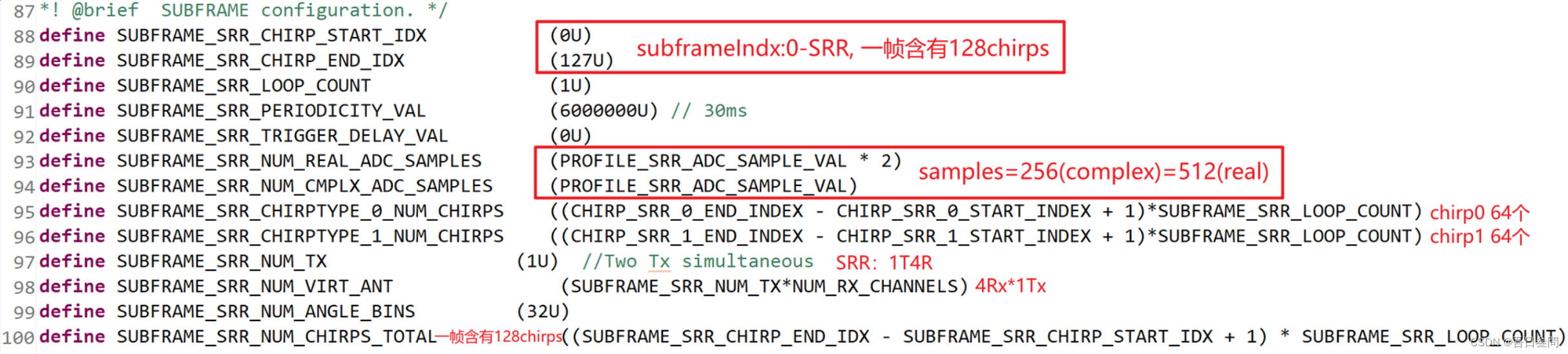
通过以上代码可以知道,SRR模式对应者subframe0和profile0,一帧中共有128个chirp,fast chirp(chirp0)64个,slow chirp(chirp1)64个。这和上篇文章中的解释是吻合的。
有了上面的基础之后,就可以开始速度扩展算法的学习了,参考文档:AWR1642汽车雷达的速度扩展算法研究。
文档中关于速度扩展的算法描述如下,直接看这个文档可能会觉得云里雾里,这里准备结合着代码进行学习。但是在看代码之前先需要做一些准备,那就是弄清楚内存分配情况,这样在看代码的时候对数据是如何操作的就比较清楚了。根据下表中的算法描述可知,需要涉及到


![[oeasy]python0026_刷新时间_延迟时间_time_sleep_死循环_while_True](https://img-blog.csdnimg.cn/img_convert/91580880b62f8b8c760d1aa2bbeaf8c8.png)


![[附源码]计算机毕业设计JAVA在线文献查阅系统](https://img-blog.csdnimg.cn/b0d500847b7e4101b4bf49604263629c.png)