对于一个刚体,以汽车为例,先旋转再平移和先平移再旋转有没有区别要看这个平移旋转是以什么坐标系为基准
如果平移和旋转都以小车坐标系为基准,二者是有区别的
如果平移旋转以世界坐标系为基准,二者是没有区别的
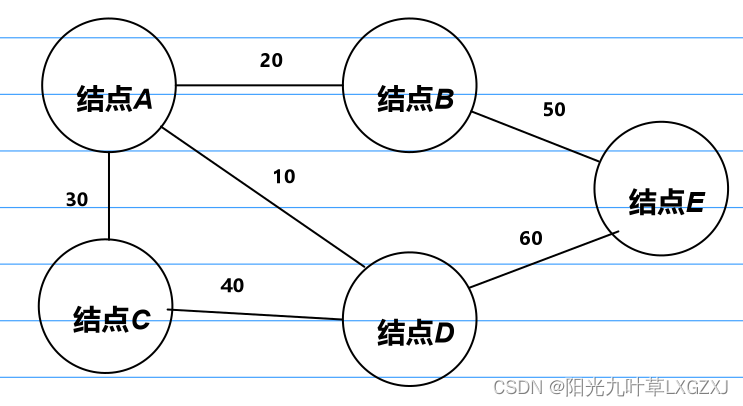
看图就明白了
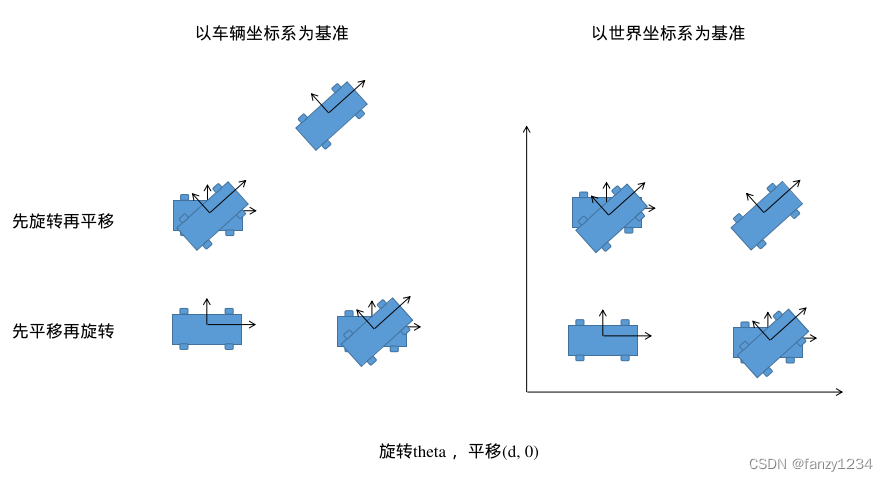
所以说抛开基准坐标系谈平移旋转都是有问题的!!!
对于一个轮速里程计,轮速是相对于车辆坐标系的,所以要用yaw角把车辆坐标系下的轮速转到世界坐标系下vx, vy,再去计算dx,dy
对于一个刚体,以汽车为例,先旋转再平移和先平移再旋转有没有区别要看这个平移旋转是以什么坐标系为基准
如果平移和旋转都以小车坐标系为基准,二者是有区别的
如果平移旋转以世界坐标系为基准,二者是没有区别的
看图就明白了
所以说抛开基准坐标系谈平移旋转都是有问题的!!!
对于一个轮速里程计,轮速是相对于车辆坐标系的,所以要用yaw角把车辆坐标系下的轮速转到世界坐标系下vx, vy,再去计算dx,dy
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/697603.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!