文章目录
- 一、RTC简介
- 二、STM32的RTC
- 2.1 主要特性
- 2.2 RTC框图介绍
- 三、访问后备区域步骤
- 四、RTC配置步骤
- 五、RTC程序配置
- 5.1 RTC结构体定义
- 5.2 RTC初始化函数
- 5.3 设置年月日,时分秒
- 5.4 判断闰年函数
- 5.5 获取当前年月日,时分秒
- 5.6 获取星期几
- 5.7 中断服务函数
- 六、拓展
一、RTC简介
RTC(Real Time Clock)实时时钟,它是一个独立的定时器。RTC模块拥有一组连续计数的计数器,在相应软件配置下,可提供时钟日历的功能。修改计数器的值可以重新设置系统当前的时间和日期。
RTC模块和时钟配置都是在后备区域,无论单片机处于何种状态,只要保证后备区正常供电,RTC就会一直工作。
二、STM32的RTC
2.1 主要特性
- 可编程的预分频系数:分频系数最高为2^20
- 32位的可编程计数器,可用于较长时间段的测量
- 可以选择以下三种RTC的时钟源
─ HSE时钟除以128
─ LSE振荡器时钟
─ LSI振荡器时钟 - 3个专门的可屏蔽中断
─ 闹钟中断,用来产生一个软件可编程的闹钟中断
─ 秒中断,用来产生一个可编程的周期性中断信号(最长可达1秒)
─ 溢出中断,指示内部可编程计数器溢出并回转为0的状态
2.2 RTC框图介绍
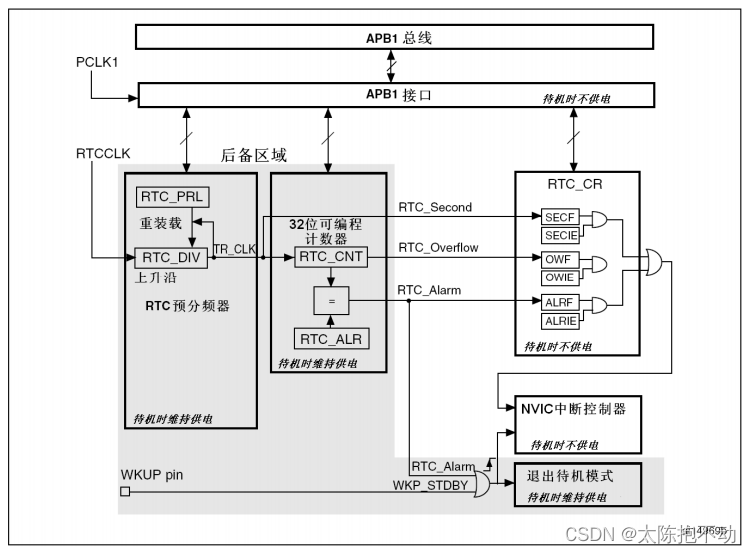
- RTCCLK通常选择低功耗32.768kHz外部晶振(LSE)
- RTC预分频器通常设置为32768,LES时钟经过RTC预分频器,输入频率变为1Hz,也就是1秒
- RTC_CNT输入时钟为1Hz时,1s加1次
- RTC_ALR是用来做闹钟的,RTC_CNT的值会与RTC_ALR的值进行比较,二者相等时,会产生闹钟中断
三、访问后备区域步骤
STM32系统复位之后,对后备寄存器和RTC的访问被禁止,这是为了防止对后备区域(BKP)的意外写操作。执行以下操作,可以访问后备区域寄存器
- 设置寄存器RCC_APB1ENR的PWREN和BKPEN位,使能电源和后备接口时钟
- 设置寄存器PWR_CR的DBP位,使能对后备寄存器和RTC的访问
完成上面的设置之后,就可以操作后备寄存器。第一次通过APB1总线访问RTC时,需要等待APB1和RTC同步,确保读取出来的RTC的寄存器值是正确的。如果同步之后,一直没有关闭APB1和RTC外设接口,就不需要再同步了。
如果内核需要对RTC寄存器写入数据,在内核发送指令后,RTC会在3个RTCCLK时钟之后,开始写入数据。每次写入时,必须要检查RTC关闭操作标志位RTOFF是否置1来判断是否写操作完成。
四、RTC配置步骤
- 使能电源时钟和后备域时钟,开启RTC后备寄存器写访问
- 复位备份区域,开启外部低速振荡器(LSE)
- 选择RTC时钟,并使能
- 设置RTC的分频系数,配置RTC时钟
- 更新配置,设置RTC中断分组
- 编写RTC中断服务函数
五、RTC程序配置
5.1 RTC结构体定义
// RTC结构体
typedef struct
{
// 时分秒
u8 hour;
u8 min;
u8 sec;
// 年月日周
u16 w_year;
u8 w_month;
u8 w_date;
u8 week;
}_calendar;
5.2 RTC初始化函数
/*
*==============================================================================
*函数名称:RTC_Init
*函数功能:初始化RTC
*输入参数:无
*返回值:0:成功;1:失败
*备 注:无
*==============================================================================
*/
u8 RTC_Init (void)
{
u8 temp=0; // 超时监控变量
// 结构体定义
NVIC_InitTypeDef NVIC_InitStructure;
// 使能PWR和BKP外设时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE); // 使能后备寄存器访问
// 检测是否是第一次配置RTC
// 配置时会想RTC寄存器写入0xA0A0,如果读出的数据不是0xA0A0,认为是第一次配置RTC
if (BKP_ReadBackupRegister(BKP_DR1) != 0xA0A0)
{
BKP_DeInit(); // 复位备份区域
RCC_LSEConfig(RCC_LSE_ON); // 设置外部低速晶振(LSE),使用外设低速晶振
// 等待低速晶振就绪
while (RCC_GetFlagStatus(RCC_FLAG_LSERDY) == RESET&&temp<250)
{
temp++;
delay_ms(10);
}
// 初始化时钟失败,晶振有问题
if(temp>=250)
{
return 1;
}
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE); // 设置RTC时钟(RTCCLK),选择LSE作为RTC时钟
RCC_RTCCLKCmd(ENABLE); // 使能RTC时钟
RTC_WaitForLastTask(); // 等待最近一次对RTC寄存器的写操作完成
RTC_WaitForSynchro(); // 等待RTC寄存器同步
RTC_ITConfig(RTC_IT_SEC, ENABLE); // 使能RTC秒中断
RTC_WaitForLastTask(); // 等待最近一次对RTC寄存器的写操作完成
RTC_EnterConfigMode(); // 允许配置
RTC_SetPrescaler(32767); // 设置RTC预分频的值
RTC_WaitForLastTask(); // 等待最近一次对RTC寄存器的写操作完成
RTC_Set_Date(2023,6,26,11,15,00); // 设置初始时间
RTC_ExitConfigMode(); // 退出配置模式
BKP_WriteBackupRegister(BKP_DR1, 0XA0A0); // 向指定的后备寄存器中写入用户程序数据
}
// 系统继续计时
else
{
RTC_WaitForSynchro(); // 等待最近一次对RTC寄存器的写操作完成
RTC_ITConfig(RTC_IT_SEC, ENABLE); // 使能RTC秒中断
RTC_WaitForLastTask(); // 等待最近一次对RTC寄存器的写操作完成
}
// 配置RTC中断分组
NVIC_InitStructure.NVIC_IRQChannel = RTC_IRQn; // RTC全局中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; // 先占优先级1位,从优先级3位
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // 先占优先级0位,从优先级4位
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 使能该通道中断
NVIC_Init(&NVIC_InitStructure); // 根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
RTC_Get_CurDate(); // 获取当前时间
return 0; // 配置成功
}
初始化函数使用时,可以用while等待初始化成功,但是需要增加一个超时检测,这里简单给出一个写法,如果1s内,RTC没有初始化成功,直接跳过
u32 tempVar = 0; // 初始化RTC时的超时计数变量
while (RTC_Init() && tempVar < 100) // RTC初始化
{
delay_ms (10);
// 10ms自加1
tempVar = tempVar + 1;
}
5.3 设置年月日,时分秒
/*
*==============================================================================
*函数名称:RTC_Set_Date
*函数功能:设置RTC的年月日,时分秒
*输入参数:无
*返回值:0:成功;1:失败
*备 注:时间范围为1970年到2099年,可修改
*==============================================================================
*/
u8 RTC_Set_Date (u16 syear,u8 smon,u8 sday,u8 hour,u8 min,u8 sec)
{
u16 t;
u32 seccount=0;
// 判断是否为合法年份
if(syear < 1970 || syear > 2099)
{
return 1;
}
for(t = 1970;t < syear;t ++) // 把所有年份的秒钟相加
{
// 闰年的秒钟数
if(Is_Leap_Year(t))
{
seccount += 31622400;
}
// 平年的秒钟数
else
{
seccount += 31536000;
}
}
smon -= 1;
for(t = 0;t < smon;t ++) // 把前面月份的秒钟数相加
{
seccount += (u32)mon_table[t] * 86400; // 月份秒钟数相加
// 闰年2月份增加一天的秒钟数
if(Is_Leap_Year(syear) && t == 1)
{
seccount += 86400;
}
}
seccount += (u32)(sday-1) * 86400; // 把前面日期的秒钟数相加
seccount += (u32)hour * 3600; // 小时秒钟数
seccount += (u32)min*60; // 分钟秒钟数
seccount += sec; // 最后的秒钟加上去
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE); // 使能PWR和BKP外设时钟
PWR_BackupAccessCmd(ENABLE); // 使能RTC和后备寄存器访问
RTC_SetCounter(seccount); // 设置RTC计数器的值
RTC_WaitForLastTask(); // 等待最近一次对RTC寄存器的写操作完成
return 0;
}
5.4 判断闰年函数
/*
*==============================================================================
*函数名称:Is_Leap_Year
*函数功能:判断输入年份是否为闰年
*输入参数:无
*返回值:0:不是闰年;1:是闰年
*备 注:四年一闰;百年不闰,四百年再闰
*==============================================================================
*/
u8 Is_Leap_Year (u16 year)
{
// 是否能被4整除
if(year % 4 == 0)
{
// 是否能被100整除
if(year % 100 == 0)
{
// 如果以00结尾,还要能被400整除
if(year % 400 == 0)
{
return 1;
}
// 是100的倍数,但是不是400的倍数
else
{
return 0;
}
}
// 是4的倍数,不是100的倍数
else
{
return 1;
}
}
// 不是4的倍数
else
{
return 0;
}
}
5.5 获取当前年月日,时分秒
/*
*==============================================================================
*函数名称:RTC_Get_CurDate
*函数功能:获取当前年月日,时分秒
*输入参数:无
*返回值:0:成功;1:失败
*备 注:无
*==============================================================================
*/
u8 RTC_Get_CurDate (void)
{
// 存储上一次的总天数值,用来监测时间变化是否超过一天
static u16 daycnt = 0;
u32 timecount = 0;
// 临时计算变量
u32 temp = 0;
u16 temp1 = 0;
timecount = RTC_GetCounter(); // 获取当前总秒数
temp = timecount / 86400; // 得到总天数
// 超过一天了
if(daycnt != temp)
{
daycnt = temp; // 更新当前总天数值
temp1 = 1970; // 从1970年开始,计算当前年份
while(temp >= 365)
{
// 是闰年
if(Is_Leap_Year(temp1))
{
// 已经过完了366天
if(temp >= 366)
{
temp -= 366; // 闰年的天数
}
// 刚过完365天,当前是第366天
else
{
temp1 ++; // 年份加1
break;
}
}
// 是平年
else
{
temp -= 365; // 平年的天数
}
temp1 ++; // 年份加1
}
calendar.w_year = temp1; // 得到年份
temp1=0; // 清零临时计算变量
// 此时temp为小于一年的天数,开始计算当前月份
while(temp >= 28) // 超过了一个月
{
// 当年是闰年的2月份
if(Is_Leap_Year(calendar.w_year) && temp1 == 1)
{
// 是闰年的二月份且天数大于等于29天
if(temp >= 29)
{
temp -= 29; // 闰年的2月份天数
}
// 是闰年的2月份,天数小于闰年2月份天数
else
{
break;
}
}
// 是平年
else
{
// 查询月份天数表
if(temp >= mon_table[temp1])
{
// 超过当月天数,减去
temp -= mon_table[temp1];
}
else
{
break;
}
}
temp1 ++; // 月份加1
}
// 加1是因为月份表索引是0~11
calendar.w_month = temp1 + 1; // 得到月份
// 当前日期为已经过去的天数加1
calendar.w_date = temp + 1; // 得到日期
}
temp = timecount % 86400; // 得到秒钟数
calendar.hour = temp / 3600; // 小时
calendar.min = (temp % 3600) / 60; // 分钟
calendar.sec = (temp % 3600) % 60; // 秒钟
calendar.week = RTC_Get_Week(calendar.w_year,calendar.w_month,calendar.w_date); // 获取星期
return 0;
}
5.6 获取星期几
该函数设计是根据蔡勒公式设计,程序如下
/*
*==============================================================================
*函数名称:RTC_Get_Week
*函数功能:获取当前是星期几
*输入参数:year:当前年;month:当前月;day:当前日
*返回值:星期几
*备 注:无
*==============================================================================
*/
u8 RTC_Get_Week (u16 year,u8 month,u8 day)
{
u16 temp;
u8 yearH,yearL;
yearH = year / 100;
yearL = year % 100;
// 如果为21世纪,年份数加100
if (yearH > 19)
{
yearL += 100;
}
// 所过闰年数只算1900年之后的
temp = yearL + yearL / 4;
temp = temp % 7;
temp = temp + day + table_week[month - 1];
if (yearL % 4 == 0 && month < 3)
{
temp --;
}
return(temp % 7);
}
5.7 中断服务函数
/*
*==============================================================================
*函数名称:RTC_IRQHandler
*函数功能:RTC中断服务函数
*输入参数:无
*返回值:无
*备 注:更新时间
*==============================================================================
*/
void RTC_IRQHandler(void)
{
// 秒中断
if (RTC_GetITStatus(RTC_IT_SEC) != RESET)
{
RTC_Get_CurDate(); // 获取当前时间
// 串口打印当前时间
printf("RTC Time:%d-%d-%d %d:%d:%d Week:%d\n",calendar.w_year,calendar.w_month,calendar.w_date,
calendar.hour,calendar.min,calendar.sec,calendar.week);
}
RTC_ClearITPendingBit(RTC_IT_SEC | RTC_IT_OW); //清除秒中断标志位
RTC_WaitForLastTask(); // 等待最近一次对RTC寄存器的写操作完成
}
六、拓展
在实际使用时,通常会通过网络授时,也就是利用WIFI模块连接网络,请求API获得初始时间。但是可能会存在些许差异。比如请求API后,获得的时间为2023.06.26.14:48:00。实际单片机解析出时间时已经过去了几秒或者十几秒,或者其他问题导致了实际解析出时间后已经与实际值有差距。此时就需要对时间进行矫正。博主在实际应用时差了14s,这里贴一下当时的矫正程序。可能大家用不到,这里只是觉得思考的过程有意思,所以贴出来分享一下。
void RTC_Time_Correct(void) // 开机时间校正
{
// 加14秒不满1分钟
if (gTimeSec < 46)
{
gTimeSec = gTimeSec + 14;
}
// 加14秒满1分钟
else if (gTimeSec >= 46)
{
gTimeSec = gTimeSec + 14 - 60;
// 分钟数需要加1
// 加1分钟不满1小时
if (gTimeMin < 59)
{
gTimeMin = gTimeMin + 1;
}
// 分钟数加1满1小时
else if (gTimeMin == 59)
{
gTimeMin = 0;
// 小时数需要加1
// 加1小时不满1天
if (gTimeHour < 23)
{
gTimeHour = gTimeHour + 1;
}
// 加1小时满1天
else if (gTimeHour == 23)
{
gTimeHour = 0;
// 天数需要加1
// 天数小于28直接加1
if (gTimeDay < 28)
{
gTimeDay = gTimeDay + 1;
}
// 天数等于28
else if (gTimeDay == 28)
{
// 当前为二月
if (gTimeMon == 2)
{
// 闰年
if (Is_Leap_Year(gTimeYear))
{
gTimeDay = gTimeDay + 1;
}
// 当前为2月且不是闰年
else
{
gTimeDay = 0; // 天数置零
gTimeMon = gTimeMon + 1; // 月份加1
}
}
}
// 天数等于30
else if (gTimeDay == 30)
{
// 当前月份只有30天
if (gTimeMon == 2 || gTimeMon == 4 || gTimeMon == 6 || gTimeMon == 9
|| gTimeMon == 11)
{
gTimeDay = 0;
gTimeMon = gTimeMon + 1;
}
// 当前月份有31天
else
{
gTimeDay = gTimeDay + 1;
}
}
// 天数等于31
else if (gTimeDay == 31)
{
gTimeDay = 0;
// 加1月不满1年
if (gTimeMon != 12)
{
gTimeMon = gTimeMon + 1;
}
else
{
gTimeMon = 1;
gTimeYear = gTimeYear + 1;
}
}
}
}
}
}