脉冲雷达的基本工作过程如下图所示
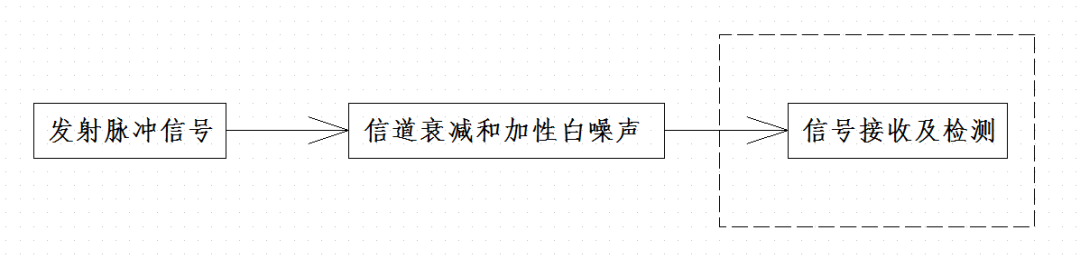
对于脉冲雷达来讲,只对信号的存在进行判断,得出的结果很简单:是否接收到回波信号,附带延时。
本文将重点讲解虚线框中的部分,也就是雷达信号的接收和检测,x(t)为接收端经过预处理的信号。
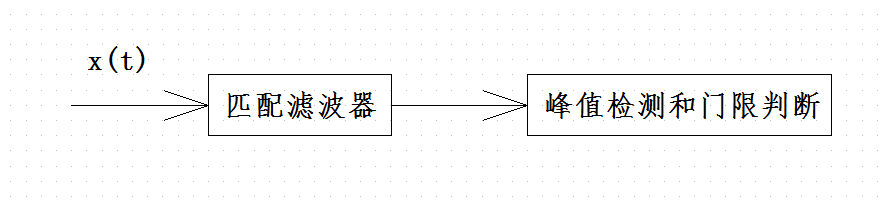
匹配滤波器的概念和意义
匹配滤波器可以等价于一个相关器,其主要作用是去除信道中的白噪声影响。相关器,顾名思义就是计算两个信号的关联程度,或者说相似程度。
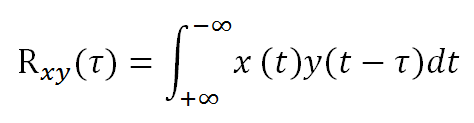
Rxy(τ)的值越大,则表示x(t)和y(t)相似程度越高。假设要从x(t)要检测出有用信号s(t),那么这个滤波器该要怎么设计呢? 仔细观察上式,可以做如下变换

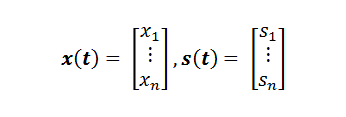
假设x(t),s(t)为两个空间向量X,S,t是[t0,t1]时间宽度,维度等于抽样点数,连续的话就是无穷维。
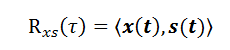
现在问题就转化成了求<x(t),s(t)>最大范数,运用柯西-施瓦茨不等式,在||s(t)||值一定的情况下

当x(t)和s(t)线性相关时,等式成立,对于一维函数来讲,有如下关系
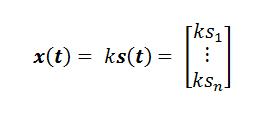
当 x(t) = k s(t)时,即取有用信号s(t)自身做匹配滤波器的模板,可以得到最大的相关性输出。
换句话说,s(t)和与自己的有尺度变换的信号相关性是最强的。
波形的选择
雷达脉冲波形的选择有3个要点:
1.尽可能地利用系统带宽
2.波形简单易于实现
3.自相关函数呈现边带特征,主旁瓣和峰值易于识别
要满足以上3点,chirp信号,也称LFM,即线性调频信号是一个不错的选择,其数学表达式如下:
其中β为扫频带宽,τ为扫频时间,βτ称为BT积
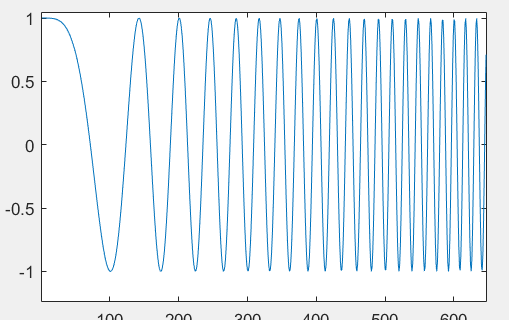
波形是这样的
频率随时间是这样变化的
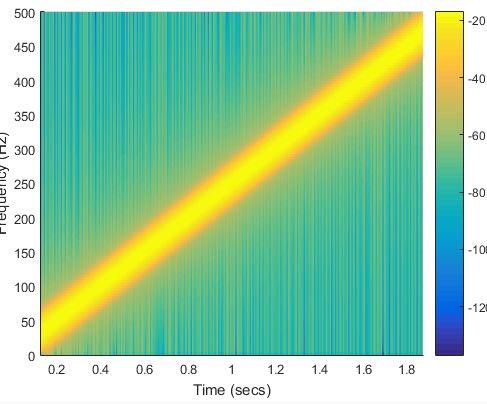
其瞬时频率F(t) 为
频谱是这样的
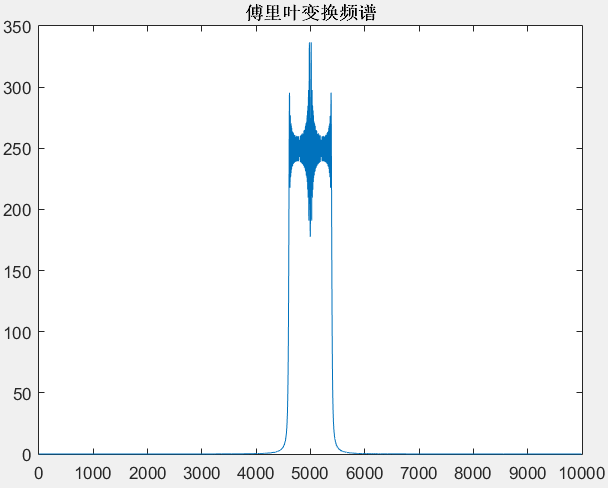
近似一个带宽为βHz的矩形。
自相关函数是这样子的
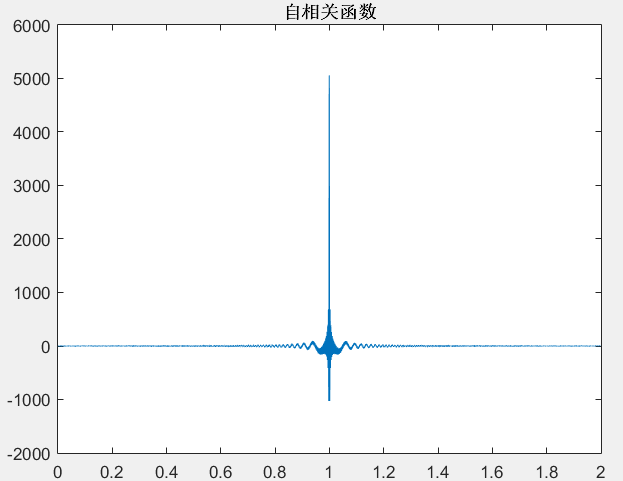
接近一个δ函数,具有很强的指向性,非常容易分辨。实际上它的瑞利分辨率为1/β S,瑞利分辨率可以近似理解为时间分辨率,意为最小的可分辨的回波间隔。
系统仿真
假设有这样一个雷达系统,其中频接收机采样率125M SPS,中频带宽20 MHz,脉冲时长10uS,发射功率5W,接收衰减120dB(含来回信号衰减,天线增益等影响因素),噪声增益106dB,现在探测500m外的一个目标,情况如何呢?
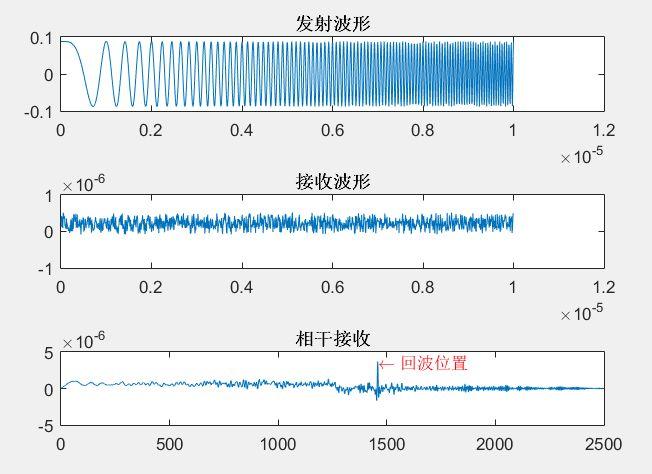
可以看到接收信号已经完全被噪声淹没,但相干接收机仍然检测到了信号。
实际距离500米,测算距离4.992000e+02米,误差0.160000% 发射功率 4.929363e+00,接收功率 4.843071e-12,噪声功率 7.985455e-11,信噪比 -12.171789dB
参考仿真代码
| % 脉冲雷达仿真 |
参考资料:《雷达信号处理基础 Fundamentals of Radar Signal Processing》[美] Mark A .Richards
作者:夏天雨后的吉他有点风
链接:脉冲雷达和相干检测 - RFASK射频问问
关于RFASK射频问问
射频问问是在"微波射频网”系列原创技术专栏基础上升级打造的技术问答学习平台,主要围绕射频芯片、微波电路、天线、雷达、卫星等相关技术领域,致力于为无线通信、微波射频、天线、雷达等行业的工程师,提供优质、原创的技术问答、专栏文章、射频课程等学习内容。更多请访问: