把基于梯度的图像分割单独拿出来。
文章目录
- 一、图像梯度相关算子的原理
- 1. Sobel算子
- 2. Prewitt算子
- 3. Roberts算子
- 二、python和halcon算子实现
- 1.python实现
- 2.halcon实现
基于梯度的图像分割方法利用像素之间的梯度信息来进行图像分割。
梯度 1是图像中像素灰度值变化最快的方向,基于梯度的图像分割方法就是通过分析图像中像素的梯度信息来提取图像中的不同物体,实现图像分割的目的。

基于梯度的图像分割方法的基本思想是:
首先对输入的图像进行滤波、增强等预处理操作,以增强图像中物体的边缘信息;
然后计算每个像素的梯度值,通常包括水平梯度、垂直梯度和斜梯度三个分量;
最后根据梯度信息进行图像分割。具体来说,基于梯度的图像分割方法通常包括以下几个步骤:
1. 图像预处理:对输入的图像进行滤波、增强等预处理操作,以增强图像中物体的边缘信息。
2. 计算梯度:对每个像素计算其水平、垂直和斜梯度三个分量。
3. 阈值化:通过计算每个像素的梯度值,将梯度值小于某一阈值的像素设置为背景像素,将梯度值大于阈值的像素设置为前景像素。
4. 分割结果:根据阈值化后的结果,将每个像素分配到相应的物体类别中,实现图像分割。
基于梯度的图像分割方法的优点是速度快、计算量小,适用于处理大规模的图像数据。但是,该方法的缺点是对噪声敏感,需要进行适当的滤波和去噪处理。同时,该方法仅适用于物体边缘明显的图像,对于物体形状复杂的图像分割效果并不理想。
一、图像梯度相关算子的原理
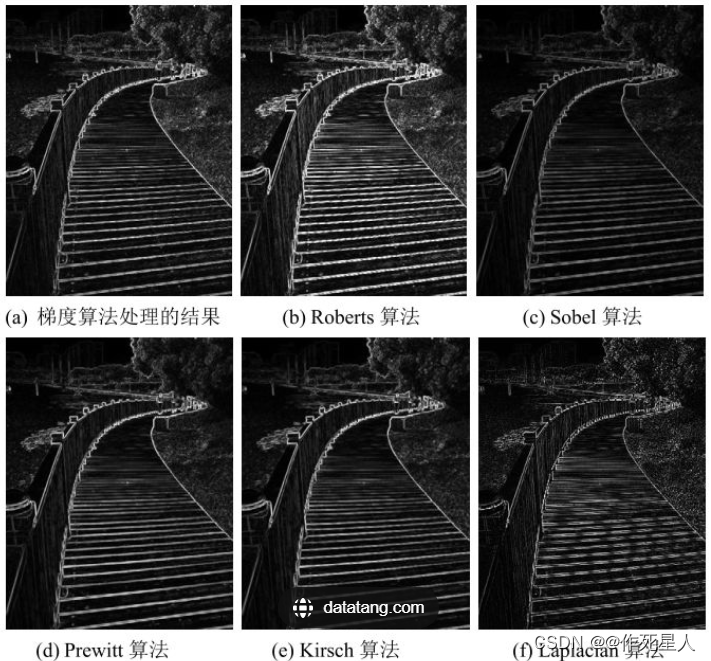
1. Sobel算子
Sobel算子是一种用于检测图像中灰度级别变化的算子,尤其是在较小灰度变化时效果比较明显。它通过计算图像中每一点与周围八个点灰度值的差,并进行差分运算,从而得到图像梯度值。
2. Prewitt算子
Prewitt算子和Sobel算子的原理相似,它们都是通过计算图像中每一点与周围八个点灰度值的差,并进行差分运算2,从而得到图像梯度值。不同的是,Prewitt算子不仅计算了差分,而且进行了平方操作,从而使得梯度值在x和y方向上的结果是一致的。
3. Roberts算子
Roberts算子是一种二阶微分算子,它通过计算图像中每一点与周围九个点灰度值的差,并进行差分运算,从而得到图像梯度值。Roberts算子主要用于边缘检测,尤其是在图像的边缘处有较强的导数3。
二、python和halcon算子实现
1.python实现
import cv2
import numpy as np
def sobel_gradient(img):
# Sobel 算子
gray_img = cv2.Sobel(img, cv2.CV_32F, 1, 0, ksize=3)
edge_img = cv2.convertScaleAbs(gray_img)
return edge_img
def prewitt_gradient(img):
# Prewitt 算子
gray_img = cv2.Sobel(img, cv2.CV_32F, 1, 0, ksize=3)
edge_img = cv2.convertScaleAbs(gray_img)
return edge_img
def roberts_gradient(img):
# Roberts 算子
gray_img = cv2.Sobel(img, cv2.CV_32F, 1, 0, ksize=3)
edge_img = cv2.convertScaleAbs(gray_img)
return edge_img
img = np.zeros((500, 500, 3), np.uint8)
img[50:150, 50:150] = 255
cv2.imshow('image', img)
sobel_gradient_img = sobel_gradient(img)
cv2.imshow('sobel_gradient_img', sobel_gradient_img)
prewitt_gradient_img = prewitt_gradient(img)
cv2.imshow('prewitt_gradient_img', prewitt_gradient_img)
roberts_gradient_img = roberts_gradient(img)
cv2.imshow('roberts_gradient_img', roberts_gradient_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
2.halcon实现
* Sobel 算子
dev_close_window ()
dev_open_window (0, 0, 512, 512, 'black', WindowHandle)
dev_display (Image)
* Sobel 算子
[SobelX, SobelY] = sobel_x (Image, 'sobel', 1, 8)
dev_display (SobelX)
* Prewitt 算子
dev_close_window ()
dev_open_window (0, 0, 512, 512, 'black', WindowHandle)
dev_display (Image)
* Prewitt 算子
[PrewittX, PrewittY] = prewitt_x (Image, 'prewitt', 1, 8)
dev_display (PrewittX)
* Roberts 算子
dev_close_window ()
dev_open_window (0, 0, 512, 512, 'black', WindowHandle)
dev_display (Image)
* Roberts 算子
[RobertsX, RobertsY] = roberts_x (Image, 'roberts', 1, 8)
dev_display (RobertsX)
注释:
图像的梯度(Gradient)是一个矢量,用于描述图像中像素点值的变化速度。在图像处理中,梯度通常用于计算图像中的边缘,这是一种提取图像特征的方法。
简单来说,梯度表示图像中像素值的变化,从一个特定的方向或方向组来看,像素值增加或减少的程度。例如,如果我们沿着图像中的水平方向(从左到右)移动,那么在这个方向上的像素值将会增加,因此在水平方向上的梯度值就会增加。相反,如果我们沿着垂直方向(从上到下)移动,那么在这个方向上的像素值将会减少,因此在垂直方向上的梯度值就会减少。
在计算机视觉和图像处理中,梯度用于寻找图像中的边缘和纹理等特征。通过计算图像中每个像素点的梯度值,我们可以找到图像中的边缘或其他有用的信息,这些信息可以用于目标检测、图像分割和其他计算机视觉任务。 ↩︎差分运算的基本原理:
1 差分定义:对于给定的两个数组 A 和 B,A 的差分数组 D(A) 是将 A 中的元素分别与它们的前一个元素进行比较,并得出的新的数组。例如,考虑数组 A={3, 1, 5, 8},其差分数组为 D(A) = {2, 0, 3, 2}。
差分运算可以通过以下两个基本步骤实现:
a. 构造差分数组 D(A);
b. 应用差分运算。
2 差分运算的应用:
a. 时间序列分析:通过差分运算,可以分析和比较不同时间段内的数据变化。
b. 数据结构:差分数组可以用于保持数据结构的稳定性,例如堆(heap)数据结构。
c. 排序算法:快速排序(QuickSort)等算法可以利用差分数组实现。
3 性质:
a. 差分数组的伪逆(pseudoinverse)是原始数组的逆矩阵。
b. 在某些情况下,可以通过差分数组快速地计算原数组的值。
总之,差分运算是一种在数学和计算机科学中处理数组的方法,通过对原数组的局部元素进行操作,得到相应的差分数组。
差分运算可以应用于时间序列分析、保持数据结构稳定性、实现快速排序等任务。 ↩︎图像边缘是指图像中灰度值突然变化的地方。导数是函数在某一点的切线斜率,它在图像处理中常用来描述图像边缘。
计算图像边缘导数的方法如下:
1.对于二值图像,边缘区域的像素值是最大值或最小值,可以使用固定阈值或自适应阈值将图像转换为二值图像。
2.对于灰度图像,可以使用高斯滤波器来平滑图像并去除噪声。
3.然后,可以使用梯度算子,如Sobel算子、Scharr算子或Prewitt算子来计算图像的边缘。
4.梯度算子包括一个水平梯度和一个垂直梯度。水平梯度计算公式为:
gradientH = 0.5 * abs(x - x_center)^2 + 0.5 * abs(y - y_center)^2
其中,x 和 y 是图像中的像素坐标,x_center 和 y_center 是图像的中心。
5.垂直梯度计算公式为:
gradientV = 0.5* abs(x - x_center)^2 + 0.5 * abs(y + y_center)^2
6.梯度算子可以用于边缘检测,并且可以通过设置不同的阈值来检测不同宽度和方向的边缘。
7.对于多通道图像,可以使用类似的方法来计算每个通道的边缘,并将它们组合在一起以形成边缘图像。
8.最后,可以将边缘图像转换为彩色图像,并通过卷积或阈值操作来提取图像中的边缘。 ↩︎





![[unity]Pico VR unity开发笔记(一)](https://img-blog.csdnimg.cn/img_convert/7821a2edf89c89d623f2a5c812ec3755.png)