Pico VR 开发笔记(一)
XR Interaction Tooikit 版本 2.3.2
一、环境搭建
其实官方文档已经写的很详细了,这里只是不废话快速搭建,另外有一项官方说明有误的,补充说明一下,在开发工具部分说明
插件安装——安装pico的sdk和XR Interaction Tooikit
环境配置——在场景里添加头显和手柄,并进行配置和项目配置
开发工具——Pico提供的串流开发工具,可以在不打包的情况的,使用手柄和头显进行调试。
1、插件安装
pico SDK安装
pico SDK下载地址:SDK - PICO 开发者平台 (pico-interactive.com)
SDK下载后解压
打开unity→Window→PackgeManager→Add Package From disk(左上角+)→选择解压后文件里的package.json

XR Interaction Tooikit安装
在packgeManager里搜索XR Interaction Tooikit
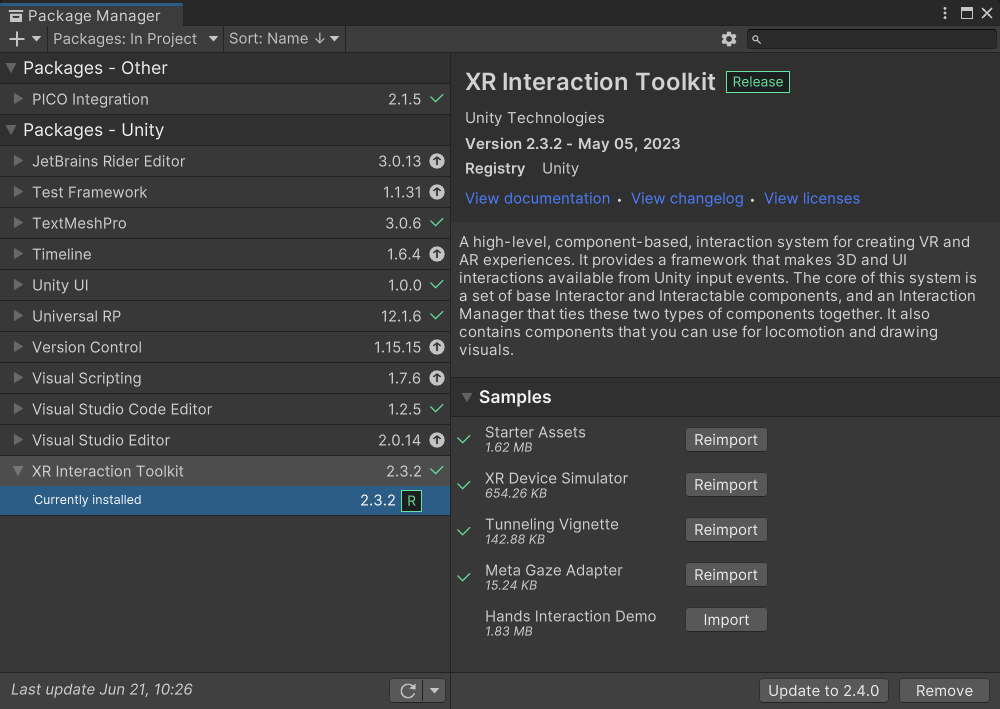
选择版本尽量高版本,不要低于2.1.0。
打开Samples 面板,导入 Starter Assets、**XR Device Simulater **和 Tunneling Vignette。
2、环境配置
场景配置
添加XR Origin:Hierarchy→Add(左上角+)→XR→XR Origin(VR)
手柄设置
-
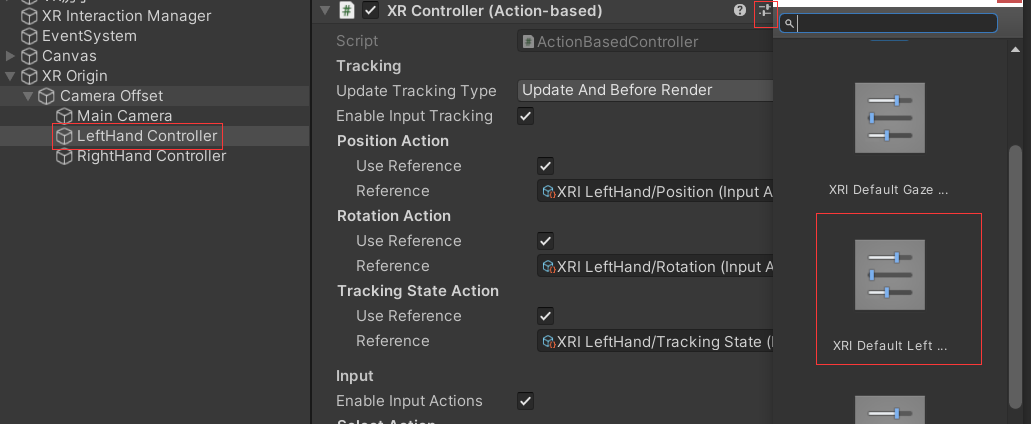
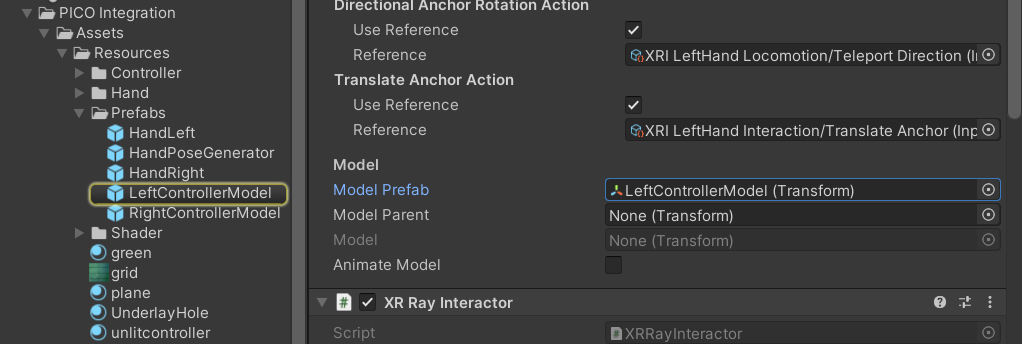
选中Hierarchy的XR Origin子物体LeftHand Controller
-
配置LeftHand Controller的控件XR Controller,点击在右上角的预设,选择XRI Default Left Controller (右手柄同样配置,选择XRI Default Right Controller )
-
选择手柄模型,在XR Controller的Model Prefab选择LeftControllerModel(Tranform)
打包设置
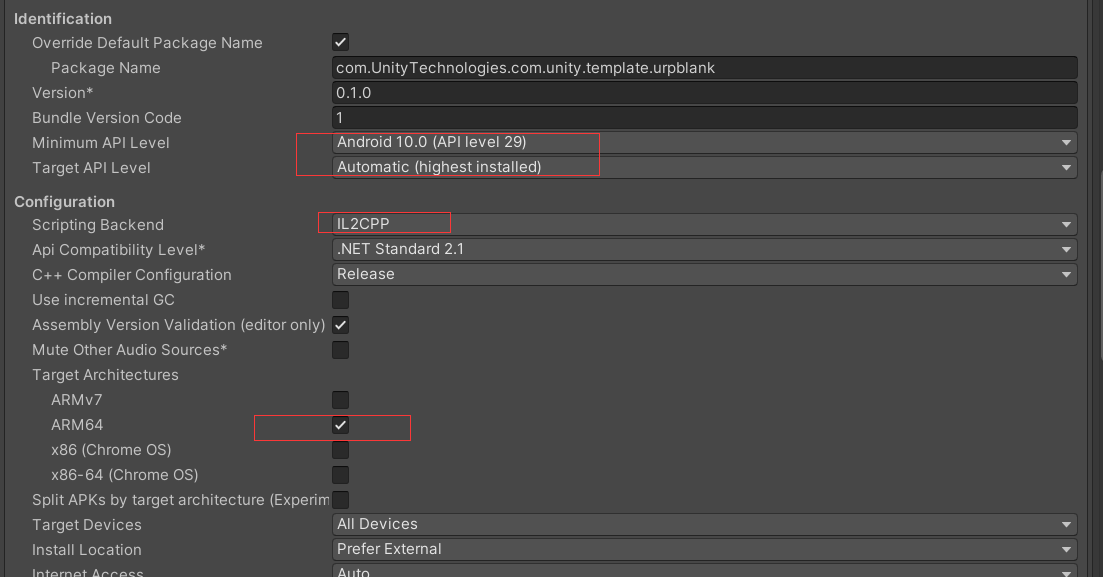
选择:Edit→Player→settings for Android→other Setting
Minimum API Level 选择Android 10.0
Target API Level 选择Automatic(Highest installed)
Scripting Backend 选择IL2CPP
勾选ARM64
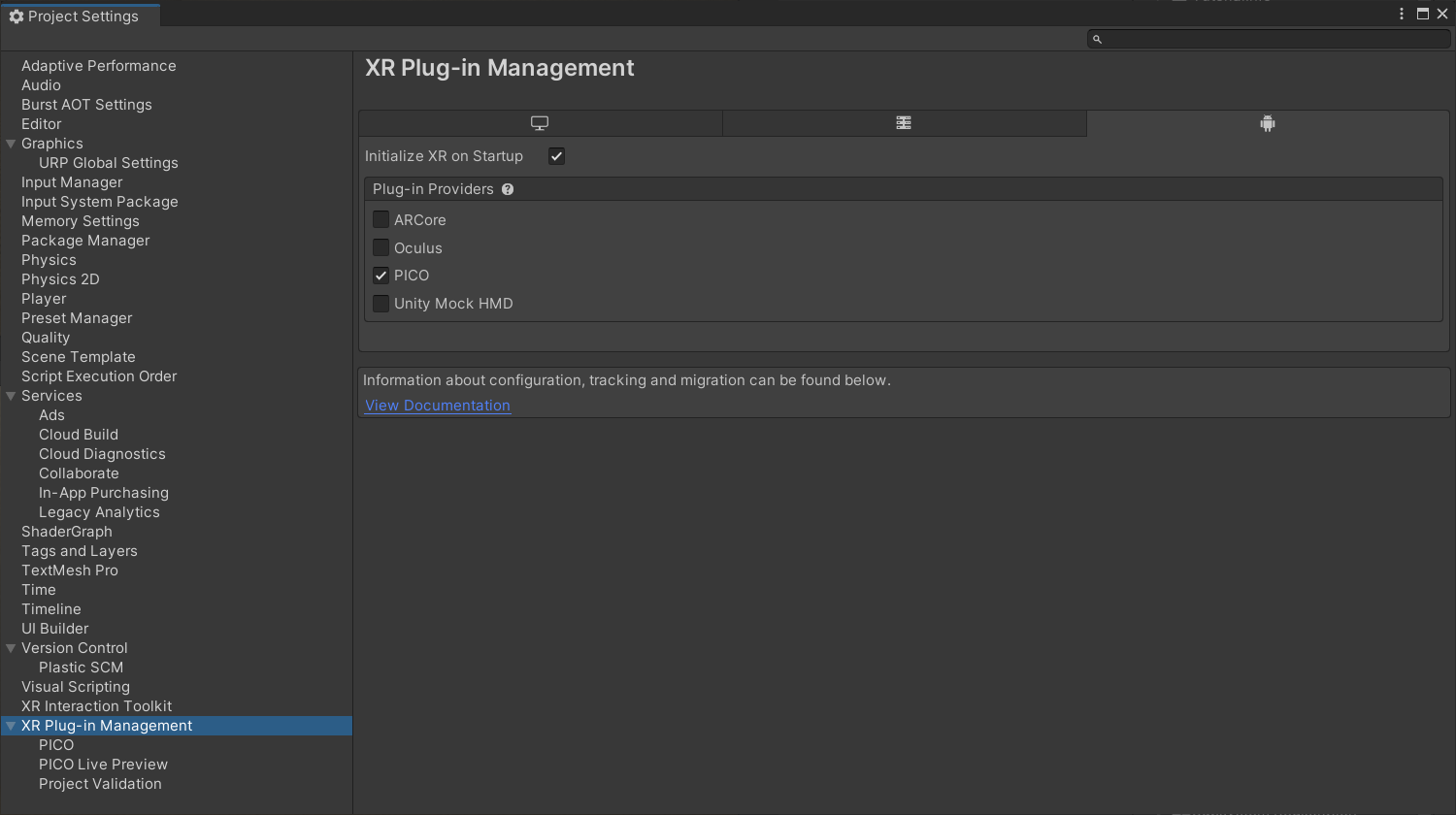
选择:Edit→Project Settings→XR Plug-in Management→Android Standalone Settings→选择PICO
3、开发工具
SDK安装
下载地址:SDK - PICO 开发者平台 (PICO Unity Live Preview Plugin)
SDK下载后解压
打开unity→Window→PackgeManager→Add Package From disk(左上角+)→选择解压后文件里的package.json

windows下载客户端
下载地址:SDK - PICO 开发者平台 (PICO Developer Center)
在本地安装后会安装steam串流工具
为一体机开启开发者模式
- 开启 PICO VR 一体机。
- 前往 设置 > 通用。
- 射线对准 设置 字段并连续点击多次,直到左侧导航栏下方出现 开发者 选项。
- 点击 开发者,进入开发者选项界面。
- 打开右上角的 USB 调试开关。
*这里官方文档有误,开启开发者模型要多次点击设置键
项目设置
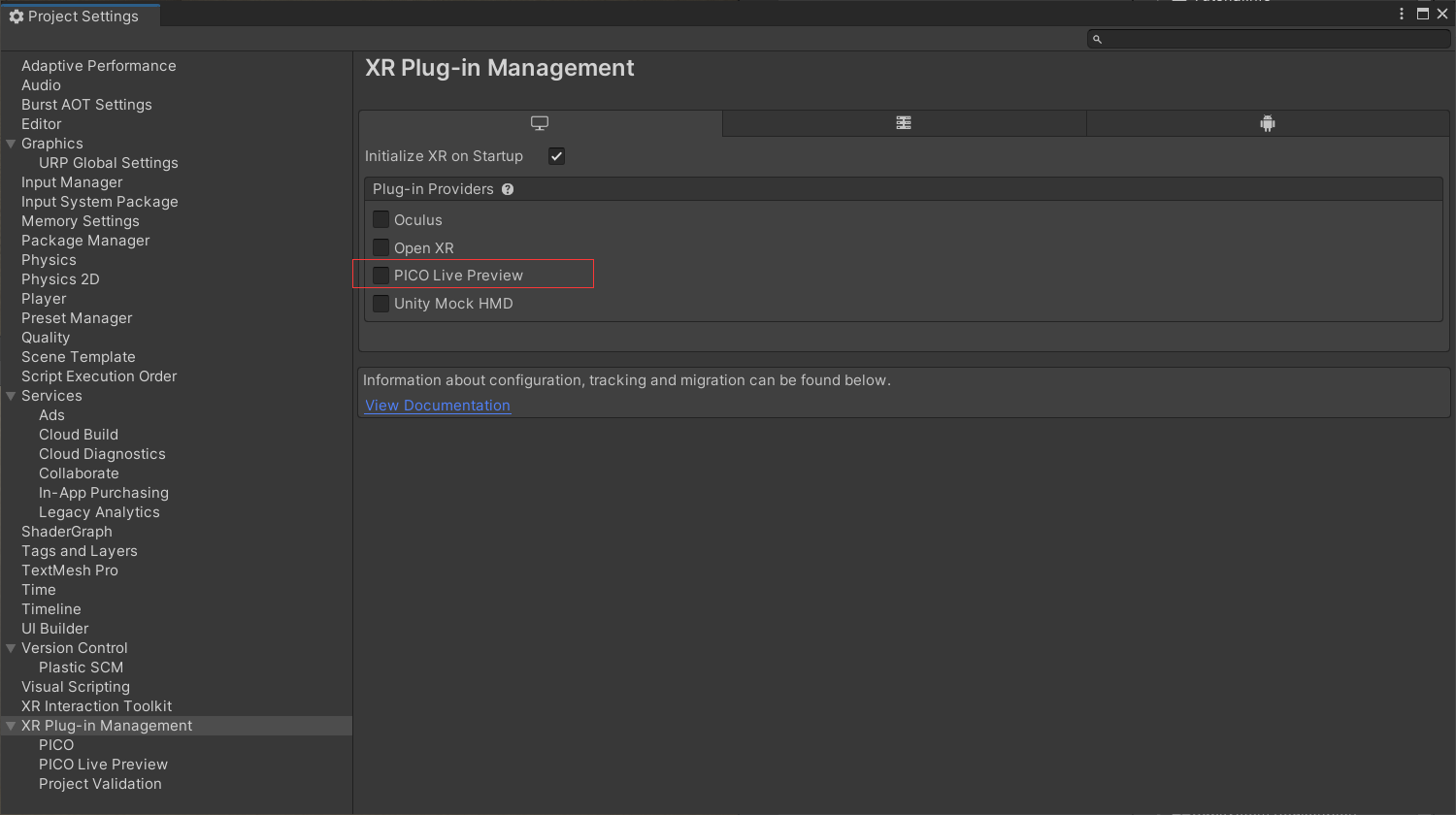
选择:Edit→Project Settings→XR Plug-in Management→ PC Standalone Settings→选择 PICO Live Preview
二、开发
1、手柄输入
得到手柄
InputDevice deviceLeft;//左手柄
InputDevice deviceRight;//右手柄
private void Start()
{
deviceLeft = InputDevices.GetDeviceAtXRNode(XRNode.LeftHand);
deviceRight = InputDevices.GetDeviceAtXRNode(XRNode.RightHand);
}
手柄触发核心方法 TryGetFeatureValue
手柄扳机键触发
/// <summary>
/// 扳机键
/// </summary>
/// <param name="inputDevice">手柄</param>
/// <param name="action">触发委托</param>
/// <param name="Value">触发参数</param>
void triggerButton(InputDevice inputDevice, ref bool Value, Action action)
{
if (inputDevice.TryGetFeatureValue(CommonUsages.triggerButton,out Value)&&Value)
{
action();
}
}
扳机键力度
/// <summary>
/// 扳机键力度
/// </summary>
/// <param name="inputDevice">手柄</param>
/// <param name="action">触发委托</param>
/// <param name="Value">触发参数</param>
void trigger(InputDevice inputDevice, ref float Value, Action<float> action)
{
if (inputDevice.TryGetFeatureValue(CommonUsages.trigger, out Value)&& !Value.Equals(0))
{
action(Value);
}
}
抓握键
/// <summary>
/// 抓握键
/// </summary>
/// <param name="inputDevice"></param>
/// <param name="action"></param>
/// <param name="Value"></param>
void gripButton(InputDevice inputDevice, ref bool Value, Action action)
{
if (inputDevice.TryGetFeatureValue(CommonUsages.gripButton, out Value) && Value)
{
action();
}
}
抓握键力度
/// <summary>
/// 抓握键力度
/// </summary>
/// <param name="inputDevice"></param>
/// <param name="action"></param>
/// <param name="Value"></param>
void grip(InputDevice inputDevice, ref float Value, Action<float> action)
{
if (inputDevice.TryGetFeatureValue(CommonUsages.grip, out Value) && !Value.Equals(0))
{
action(Value);
}
}
摇杆方向
/// <summary>
/// 摇杆方向
/// </summary>
/// <param name="inputDevice"></param>
/// <param name="action"></param>
/// <param name="Value"></param>
void primary2DAxis(InputDevice inputDevice, ref Vector2 Value, Action<Vector2> action)
{
if (inputDevice.TryGetFeatureValue(CommonUsages.primary2DAxis, out Value) && !Value.Equals(Vector2.zero))
{
action(Value);
}
}
摇杆
/// <summary>
/// 摇杆
/// </summary>
/// <param name="inputDevice"></param>
/// <param name="Value"></param>
/// <param name="action"></param>
void primary2DAxisClick(InputDevice inputDevice, ref bool Value, Action action)
{
if (inputDevice.TryGetFeatureValue(CommonUsages.primary2DAxisClick, out Value) && Value)
{
action();
}
}
X/A
/// <summary>
/// X/A
/// </summary>
/// <param name="inputDevice"></param>
/// <param name="Value"></param>
/// <param name="action"></param>
void primaryButton(InputDevice inputDevice, ref bool Value, Action action)
{
if (inputDevice.TryGetFeatureValue(CommonUsages.primaryButton, out Value) && Value)
{
action();
}
}
Y/B
/// <summary>
/// Y/B
/// </summary>
/// <param name="inputDevice"></param>
/// <param name="Value"></param>
/// <param name="action"></param>
void secondaryButton(InputDevice inputDevice, ref bool Value, Action action)
{
if (inputDevice.TryGetFeatureValue(CommonUsages.secondaryButton, out Value) && Value)
{
action();
}
}
2、射线
得到射线的方法
XRRayInteractor.TryGetCurrent3DRaycastHit(out hit)
XRRayInteractor是手柄的脚本XRRayInteractor
Demo
public XRRayInteractor rayInteractor;
RaycastHit hit;
Vector3 getRayPoint()
{
if (rayInteractor.TryGetCurrent3DRaycastHit(out hit))
{
string name = hit.collider.name;
Debug.Log(name);
return hit.point;
}
else
{
return Vector3.zero;
}
}