文章目录
- gazebo 教程
- gazebo 添加动态障碍物
- gazebo添加动态障碍物插件
- gazebo中动态障碍物实时pose
gazebo 教程
- gazebo github
https://github.com/gazebosim/gazebo-classic/tree/gazebo9 - gazebo tutorials
https://classic.gazebosim.org/tutorials - 运行一个空白环境
<sdf version="1.4">
<world name="default">
<scene>
<ambient>0.4 0.4 0.4 1</ambient>
<background>0.7 0.7 0.7 1</background>
<shadows>true</shadows>
</scene>
<!-- A global light source -->
<include>
<uri>model://sun</uri>
</include>
<!-- A ground plane -->
<include>
<uri>model://ground_plane</uri>
</include>
</world>
</sdf>
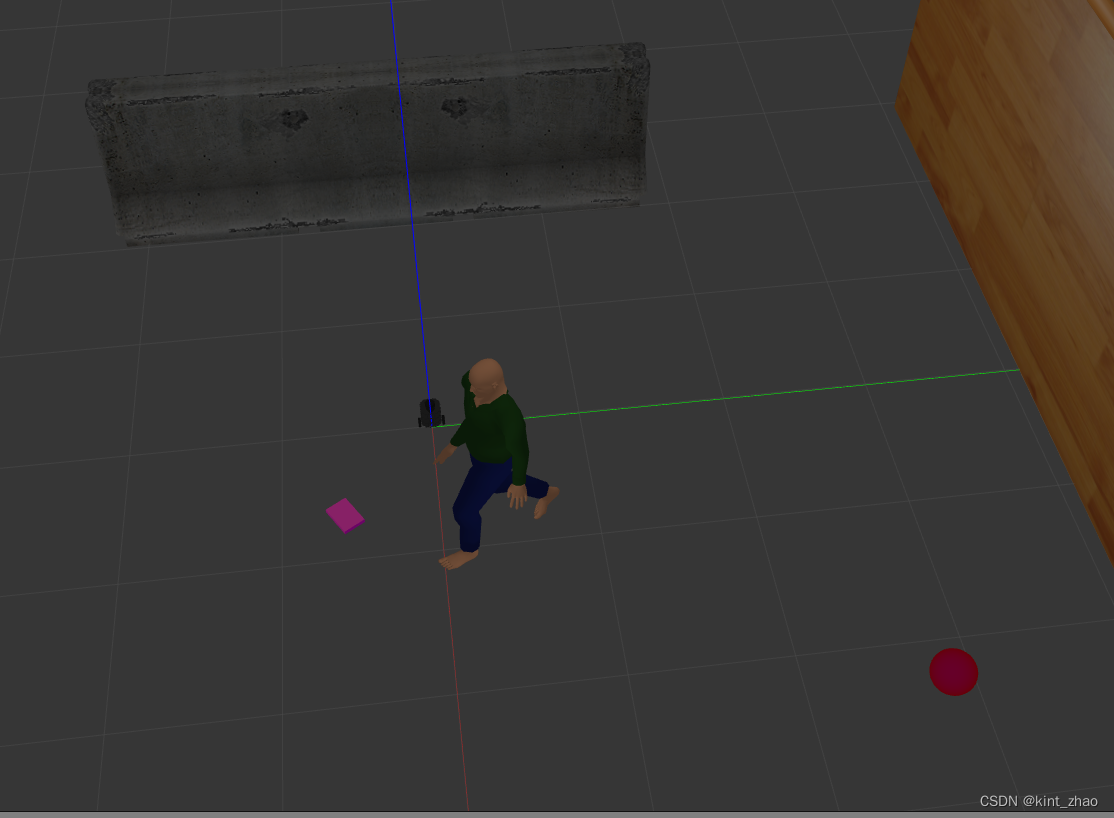
gazebo 添加动态障碍物
参照官方教程:
https://classic.gazebosim.org/tutorials?tut=actor&cat=build_robot
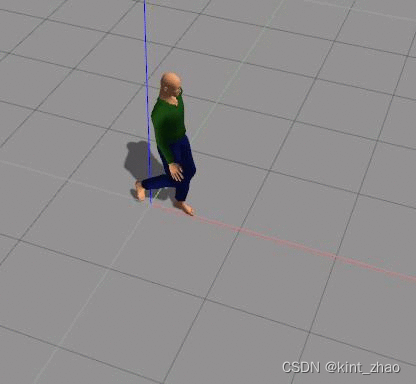
actor标签范围内的模型配置。人会在多点间运动
<sdf version="1.6">
<world name="default">
<include>
<uri>model://sun</uri>
</include>
<actor name="actor">
<skin>
<filename>walk.dae</filename>
</skin>
<animation name="animation">
<filename>walk.dae</filename>
</animation>
<script>
<trajectory id="0" type="walking">
<waypoint>
<time>0</time>
<pose>0 2 0 0 0 -1.57</pose>
</waypoint>
<waypoint>
<time>2</time>
<pose>0 -2 0 0 0 -1.57</pose>
</waypoint>
<waypoint>
<time>2.5</time>
<pose>0 -2 0 0 0 1.57</pose>
</waypoint>
<waypoint>
<time>7</time>
<pose>0 2 0 0 0 1.57</pose>
</waypoint>
<waypoint>
<time>7.5</time>
<pose>0 2 0 0 0 -1.57</pose>
</waypoint>
</trajectory>
</script>
</actor>
</world>
</sdf>
问题: 这个人或其它模型的配置是透明的,激光无法监测到对应的物体
gazebo添加动态障碍物插件
参照: https://zhuanlan.zhihu.com/p/404197579
https://blog.csdn.net/allenhsu6/article/details/114068662
默认gazebo9 的插件路径: /usr/lib/x86_64-linux-gnu/gazebo-9/plugins
kint@kint:~$ ls /usr/lib/x86_64-linux-gnu/gazebo-9/plugins
libActorPlugin.so libCameraPlugin.so libFiducialCameraPlugin.so libHydraPlugin.so libLinearBatteryConsumerPlugin.so libRandomVelocityPlugin.so libSkidSteerDrivePlugin.so
libActuatorPlugin.so libCartDemoPlugin.so libFollowerPlugin.so libImuSensorPlugin.so libLinearBatteryPlugin.so libRayPlugin.so libSonarPlugin.so
libArduCopterPlugin.so libCessnaGUIPlugin.so libForceTorquePlugin.so libInitialVelocityPlugin.so libLinkPlot3DPlugin.so libRaySensorNoisePlugin.so libSphereAtlasDemoPlugin.so
libArrangePlugin.so libCessnaPlugin.so libGimbalSmall2dPlugin.so libJointTrajectoryPlugin.so libLookAtDemoPlugin.so libRegionEventBoxPlugin.so libTimerGUIPlugin.so
libAttachLightPlugin.so libContactPlugin.so libGpuRayPlugin.so libKeyboardGUIPlugin.so libModelPropShop.so libRestUiPlugin.so libTouchPlugin.so
libBlinkVisualPlugin.so libDepthCameraPlugin.so libHarnessPlugin.so libKeysToJointsPlugin.so libMudPlugin.so libRestWebPlugin.so libTransporterPlugin.so
libBreakableJointPlugin.so libDiffDrivePlugin.so libHeightmapLODPlugin.so libLensFlareSensorPlugin.so libPlaneDemoPlugin.so libRubblePlugin.so libVehiclePlugin.so
libBuoyancyPlugin.so libElevatorPlugin.so libHydraDemoPlugin.so libLiftDragPlugin.so libPressurePlugin.so libSimEventsPlugin.so libWindPlugin.so
kint@kint:~$ ls /usr/lib/x86_64-linux-gnu/gazebo-9/plugins | grep libActorCollisionsPlugin
编译并拷贝好对应插件后
kint@kint:~$ ls /usr/lib/x86_64-linux-gnu/gazebo-9/plugins | grep libActorCollisionsPlugin
libActorCollisionsPlugin.so
参考自己下载源码去编译,注意gazebo的版本和branch对应
附:在gazebo中添加碰撞插件
1.下载gazebo源码
git clone https://github.com/gazebosim/gazebo-classic
注意branch: gazebo9
2.进入actor_collisions文件夹
cd examples/plugins/actor_collisions
3.编译碰撞插件
mkdir build
cd build
cmake ..
make
4.插件拷贝
sudo cp libActorCollisionsPlugin.so /usr/lib/x86_64-linux-gnu/gazebo-9/plugins
5.测试插件
gazebo actor_collisions.world
actor_collisions.world 中的动态物体代码部分如下,如要在原静态world中添加,直接将actor标签整过去就行,修改相应的运行轨迹waypoint:
<actor name="actor">
<plugin name="actor_collisions_plugin" filename="libActorCollisionsPlugin.so">
<scaling collision="LHipJoint_LeftUpLeg_collision" scale="
0.01
0.001
0.001
"/>
<scaling collision="LeftUpLeg_LeftLeg_collision" scale="
8.0
8.0
1.0
"/>
<scaling collision="LeftLeg_LeftFoot_collision" scale="
8.0
8.0
1.0
"/>
<scaling collision="LeftFoot_LeftToeBase_collision" scale="
4.0
4.0
1.5
"/>
<scaling collision="RHipJoint_RightUpLeg_collision" scale="
0.01
0.001
0.001
"/>
<scaling collision="RightUpLeg_RightLeg_collision" scale="
8.0
8.0
1.0
"/>
<scaling collision="RightLeg_RightFoot_collision" scale="
8.0
8.0
1.0
"/>
<scaling collision="RightFoot_RightToeBase_collision" scale="
4.0
4.0
1.5
"/>
<scaling collision="LowerBack_Spine_collision" scale="
12.0
20.0
5.0
" pose="0.05 0 0 0 -0.2 0"/>
<scaling collision="Spine_Spine1_collision" scale="
0.01
0.001
0.001
"/>
<scaling collision="Neck_Neck1_collision" scale="
0.01
0.001
0.001
"/>
<scaling collision="Neck1_Head_collision" scale="
5.0
5.0
3.0
"/>
<scaling collision="LeftShoulder_LeftArm_collision" scale="
0.01
0.001
0.001
"/>
<scaling collision="LeftArm_LeftForeArm_collision" scale="
5.0
5.0
1.0
"/>
<scaling collision="LeftForeArm_LeftHand_collision" scale="
5.0
5.0
1.0
"/>
<scaling collision="LeftFingerBase_LeftHandIndex1_collision" scale="
4.0
4.0
3.0
"/>
<scaling collision="RightShoulder_RightArm_collision" scale="
0.01
0.001
0.001
"/>
<scaling collision="RightArm_RightForeArm_collision" scale="
5.0
5.0
1.0
"/>
<scaling collision="RightForeArm_RightHand_collision" scale="
5.0
5.0
1.0
"/>
<scaling collision="RightFingerBase_RightHandIndex1_collision" scale="
4.0
4.0
3.0
"/>
</plugin>
<skin>
<filename>walk.dae</filename>
<scale>1.0</scale>
</skin>
<animation name="walking">
<filename>walk.dae</filename>
<scale>1.000000</scale>
<interpolate_x>true</interpolate_x>
</animation>
<script>
<loop>true</loop>
<delay_start>0.000000</delay_start>
<auto_start>true</auto_start>
<trajectory id="0" type="walking">
<waypoint>
<time>0.000000</time>
<pose>0.000000 1.000000 0.000000 0.000000 0.000000 0.000000</pose>
</waypoint>
<waypoint>
<time>0.500000</time>
<pose>0.195090 0.980785 0.000000 0.000000 0.000000 -0.196350</pose>
</waypoint>
<waypoint>
<time>1.000000</time>
<pose>0.382683 0.923880 0.000000 0.000000 0.000000 -0.392699</pose>
</waypoint>
<waypoint>
<time>1.500000</time>
<pose>0.555570 0.831470 0.000000 0.000000 0.000000 -0.589049</pose>
</waypoint>
<waypoint>
<time>2.000000</time>
<pose>0.707107 0.707107 0.000000 0.000000 0.000000 -0.785398</pose>
</waypoint>
<waypoint>
<time>2.500000</time>
<pose>0.831470 0.555570 0.000000 0.000000 0.000000 -0.981748</pose>
</waypoint>
<waypoint>
<time>3.000000</time>
<pose>0.923880 0.382683 0.000000 0.000000 0.000000 -1.178100</pose>
</waypoint>
<waypoint>
<time>3.500000</time>
<pose>0.980785 0.195090 0.000000 0.000000 0.000000 -1.374450</pose>
</waypoint>
<waypoint>
<time>4.000000</time>
<pose>1.000000 0.000000 0.000000 0.000000 0.000000 -1.570800</pose>
</waypoint>
<waypoint>
<time>4.500000</time>
<pose>0.980785 -0.195090 0.000000 0.000000 0.000000 -1.767150</pose>
</waypoint>
<waypoint>
<time>5.000000</time>
<pose>0.923880 -0.382683 0.000000 0.000000 0.000000 -1.963500</pose>
</waypoint>
<waypoint>
<time>5.500000</time>
<pose>0.831470 -0.555570 0.000000 0.000000 0.000000 -2.159840</pose>
</waypoint>
<waypoint>
<time>6.000000</time>
<pose>0.707107 -0.707107 0.000000 0.000000 0.000000 -2.356190</pose>
</waypoint>
<waypoint>
<time>6.500000</time>
<pose>0.555570 -0.831470 0.000000 0.000000 0.000000 -2.552540</pose>
</waypoint>
<waypoint>
<time>7.500000</time>
<pose>0.382683 -0.923880 0.000000 0.000000 0.000000 -2.748890</pose>
</waypoint>
<waypoint>
<time>8.500000</time>
<pose>0.195090 -0.980785 0.000000 0.000000 0.000000 -2.945240</pose>
</waypoint>
<waypoint>
<time>9.500000</time>
<pose>0.000000 -1.000000 0.000000 0.000000 0.000000 -3.141590</pose>
</waypoint>
<waypoint>
<time>10.500000</time>
<pose>-0.195090 -0.980785 0.000000 0.000000 0.000000 2.945245</pose>
</waypoint>
<waypoint>
<time>11.500000</time>
<pose>-0.382683 -0.923880 0.000000 0.000000 0.000000 2.748895</pose>
</waypoint>
<waypoint>
<time>12.000000</time>
<pose>-0.555570 -0.831470 0.000000 0.000000 0.000000 2.552545</pose>
</waypoint>
<waypoint>
<time>12.500000</time>
<pose>-0.707107 -0.707107 0.000000 0.000000 0.000000 2.356195</pose>
</waypoint>
<waypoint>
<time>13.000000</time>
<pose>-0.831470 -0.555570 0.000000 0.000000 0.000000 2.159845</pose>
</waypoint>
<waypoint>
<time>13.500000</time>
<pose>-0.923880 -0.382683 0.000000 0.000000 0.000000 1.963495</pose>
</waypoint>
<waypoint>
<time>14.000000</time>
<pose>-0.980785 -0.195090 0.000000 0.000000 0.000000 1.767145</pose>
</waypoint>
<waypoint>
<time>14.500000</time>
<pose>-1.000000 0.000000 0.000000 0.000000 0.000000 1.570795</pose>
</waypoint>
<waypoint>
<time>15.000000</time>
<pose>-0.980785 0.195090 0.000000 0.000000 0.000000 1.374445</pose>
</waypoint>
<waypoint>
<time>15.500000</time>
<pose>-0.923880 0.382683 0.000000 0.000000 0.000000 1.178095</pose>
</waypoint>
<waypoint>
<time>16.000000</time>
<pose>-0.831470 0.555570 0.000000 0.000000 0.000000 0.981745</pose>
</waypoint>
<waypoint>
<time>16.500000</time>
<pose>-0.707107 0.707107 0.000000 0.000000 0.000000 0.785395</pose>
</waypoint>
<waypoint>
<time>17.000000</time>
<pose>-0.555570 0.831470 0.000000 0.000000 0.000000 0.589045</pose>
</waypoint>
<waypoint>
<time>17.500000</time>
<pose>-0.382683 0.923880 0.000000 0.000000 0.000000 0.392695</pose>
</waypoint>
<waypoint>
<time>18.000000</time>
<pose>-0.195090 0.980785 0.000000 0.000000 0.000000 0.196345</pose>
</waypoint>
</trajectory>
</script>
</actor>
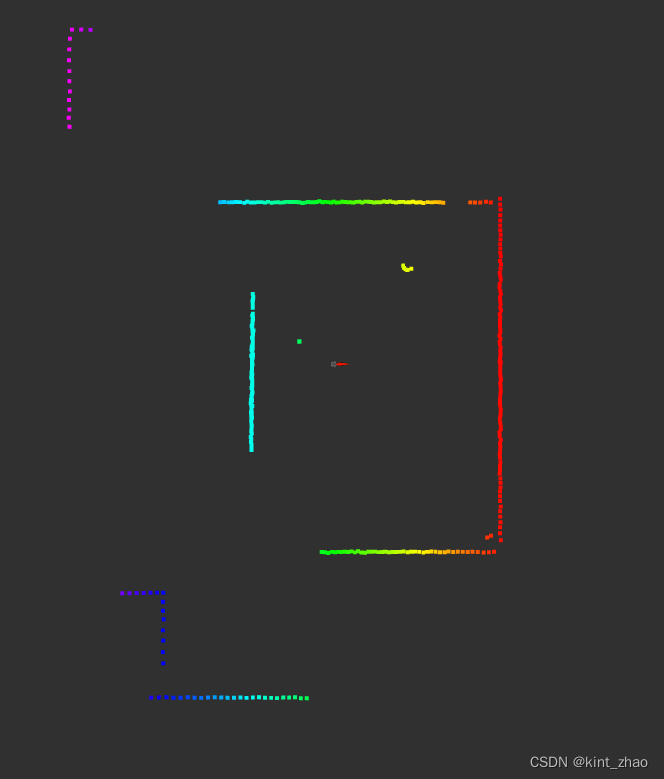
激光可视效果图:
gazebo中动态障碍物实时pose
- gazebo_ros_p3d 无法发布world中model的pose
运动中机器人是可以通过这以odometer的形式发布话题
https://github.com/ros-simulation/gazebo_ros_pkgs/blob/noetic-devel/gazebo_plugins/src/gazebo_ros_p3d.cpp
<plugin name="robot_p3d" filename="libgazebo_ros_p3d.so">
<alwaysOn>true</alwaysOn>
<updateRate>50.0</updateRate>
<bodyName>base_link</bodyName>
<topicName>robot_pose</topicName>
<gaussianNoise>0.01</gaussianNoise>
<frameName>world</frameName>
<xyzOffsets>0 0 0</xyzOffsets>
<rpyOffsets>0 0 0</rpyOffsets>
</plugin>
动态模型使用gazebo_ros_p3d插件发布pose待研究
无效的
<!-- <plugin name="people_p3d" filename="libgazebo_ros_p3d.so">
<alwaysOn>true</alwaysOn>
<updateRate>50.0</updateRate>
<bodyName>actor</bodyName>
<topicName>people_pose</topicName>
<gaussianNoise>0.01</gaussianNoise>
<frameName>world</frameName>
<xyzOffsets>0 0 0</xyzOffsets>
<rpyOffsets>0 0 0</rpyOffsets>
</plugin> -->
- gazebo提供相应的服务与话题接口可以查看model的pose信息
int@kint:~$ rostopic list | grep state
/gazebo/link_states
/gazebo/model_states
kint@kint:~$ rosservice list | grep state
/gazebo/get_link_state
/gazebo/get_model_state
kint@kint:~$ rostopic echo /gazebo/model_states
name:
- ground_plane
- Untitled
- cube_20k
- Dumpster
- Dumpster_0
- jersey_barrier
- actor
- turtlebot3_burger
pose:
-
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
-
position:
x: 0.603431
y: 0.0078
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
-
position:
x: -5.38602065236
y: -6.80744881043
z: 0.499999533763
orientation:
x: -1.56147498596e-07
y: 4.11218458777e-07
z: 0.000350767461665
w: 0.999999938481
-
position:
x: 5.96634000329
y: -7.4192400014
z: 0.000917228865924
orientation:
x: -4.4374537364e-08
y: 8.20482662792e-07
z: -3.21807825887e-11
w: 1.0
-
position:
x: 6.01622000329
y: 6.8208899986
z: 0.000917228865924
orientation:
x: -4.4374537364e-08
y: 8.20482662792e-07
z: -3.21807825887e-11
w: 1.0
-
position:
x: -2.42989
y: -0.195854
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.703329181425
w: 0.710864306711
-
position:
x: -0.762738254539
y: -0.685481094471
z: 1.032665
orientation:
x: -0.224475849993
y: 0.65300445035
z: 0.665474749341
w: -0.283441596422
-
position:
x: -0.0451317038465
y: 0.0244496431331
z: -0.00100340529416
orientation:
x: -0.00228018314614
y: 0.00312514199549
z: 0.588102512665
w: 0.808777144119
twist:
-
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
-
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
-
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
-
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
-
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
-
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
-
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
-
linear:
x: -0.00109069429249
y: 0.000179601510918
z: 1.84796141906e-05
angular:
x: 7.65645076952e-05
y: -1.82519279997e-05
z: 0.0165613168548
kint@kint:~$ rosservice call /gazebo/get_model_state "model_name: 'actor'
relative_entity_name: ''"
header:
seq: 1
stamp:
secs: 628
nsecs: 363000000
frame_id: ''
pose:
position:
x: -0.734865579665
y: 0.655232085776
z: 1.030874
orientation:
x: 0.261328317576
y: 0.654221918987
z: 0.66146012535
w: 0.257238592986
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
success: True
status_message: "GetModelState: got properties"
- 常见一个ros节点程序,订阅gazebo模型发布的pose, 再将目标模型的pose以odometer方式发布