和你一起终身学习,这里是程序员Android
经典好文推荐,通过阅读本文,您将收获以下知识点:
一、Camera 框架介绍
二、Camera Bringup 需要配置的文件
三、复盘总结
一、Camera 框架介绍
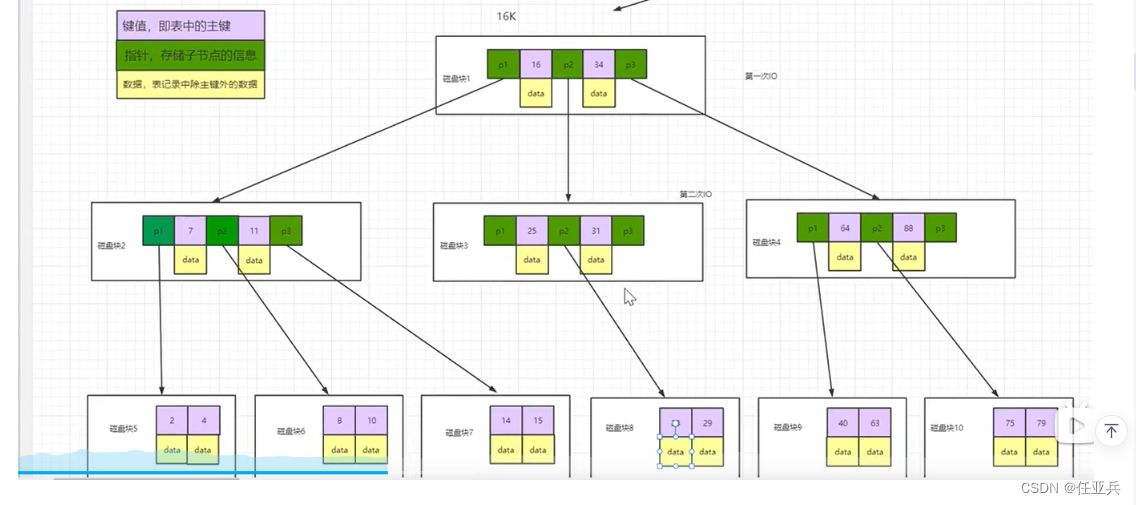
Camera 的框架分为 Kernel 部分和 hal 部分,其中kernel部分主要有两块:
image sensor driver,负责具体型号的sensor的id检测,上电,以及在preview、capture、初始化、3A等等功能设定时的寄存器配置;
isp driver,通过DMA将sensor数据流上传;
HAL层部分主要有三部分组成:imageio,主要负责数据buffer上传的pipe;
drv,包含imgsensor和isp的hal层控制;
feature io,包含各种3A等性能配置;
二、Camera Bringup 需要配置的文件
(本文以hi1634q型号的前摄为例,平台是mt6789,kernel版本为5.10)
2.1、Device Config Files
修改时删除多余的 sensor driver name,只保留自己的即可;
/device/mediateksample/k6789v1_64
ProjectConfig.mk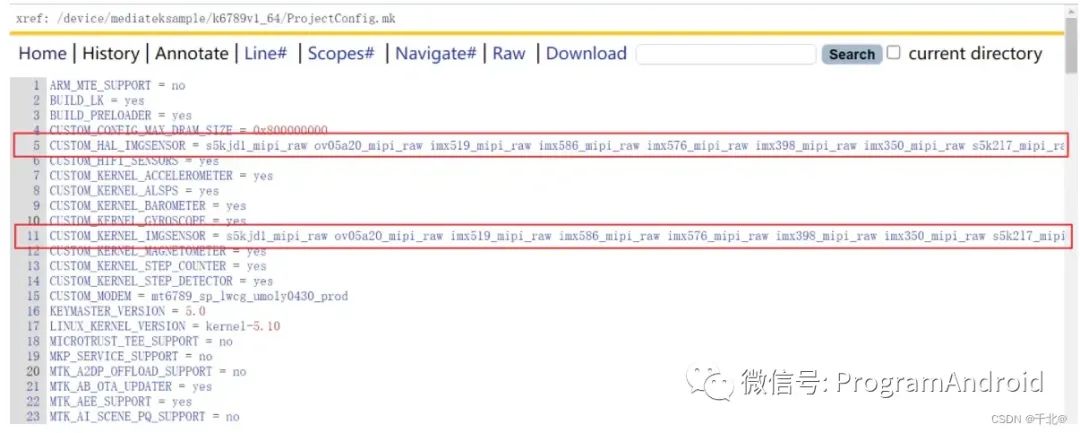
/device/mediatek/mt6789
CameraConfig.mk
device-camera.mk
注意:CUSTOM_HAL_IMGSENSOR 、CUSTOM_HAL_SUB_IMGSENSOR 、CUSTOM_KERNEL_IMGSENSOR 、CUSTOM_KERNEL_SUB_IMGSENSOR 这四个必须都要指定 sensor name;不能遗漏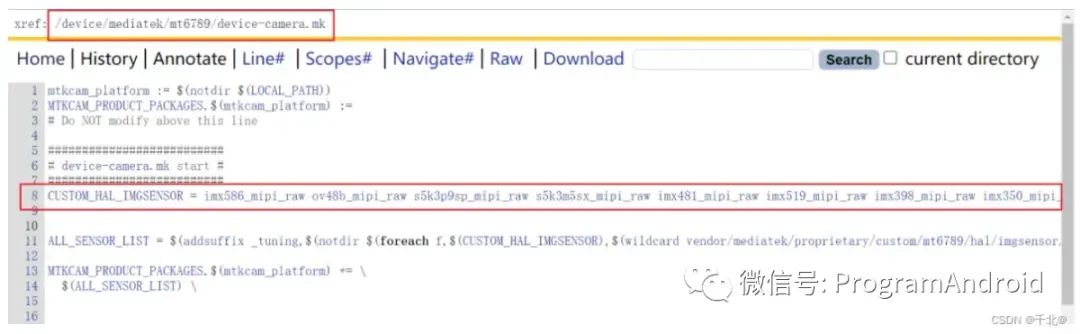
/device/mediatek/common/kernel-headers
kd_imgsensor.h指定 sensor name 和 sensor model id !这里一定要check不能出错!

2.2、Kernel Config Files
/kernel-5.10/arch/arm64/configs
mgk_64_k510_defconfig修改时删除多余的 sensor driver name,只保留自己的即可;
/kernel-5.10/drivers/misc/mediatek/imgsensor/inc
kd_imgsensor.h指定 sensor name 和 sensor model id 和 device config files 那边修改一样!这里一定要check不能出错!
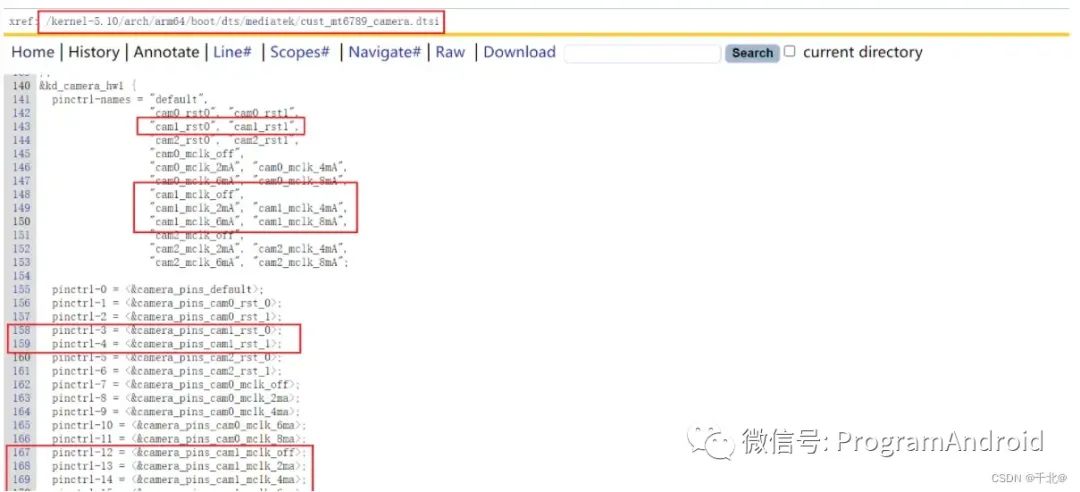
/kernel-5.10/arch/arm64/boot/dts/mediatek
cust_mt6789_camera.dtsi(1)修改 cust_mt6789_camera.dtsi 中 pio 节点的各个Pin number,其中 1 对应 sensor index, 最好是将其他不相关的 sensor 定义都删除,排除干扰,提供一个干净整洁的代码!并将文件中 kd_camera_hw1 节点中的 pin 增加对应节点,rst 引脚和 mclk 引脚需要根据原理图上的信息去 map 查找,具体对应的是哪个 gpio引脚,pinctrl也只需要保留对应节点即可(必须从0开始递增,否则遍历会出错!),如下图红圈部分:

(2) 在 cust_mt6789_camera.dtsi 文件中 kd_camera_hw1 节点中将采用 PMIC 供电方式的 pin 增加如下子节点,再加一个 cust-sensor = “sensor_mipi_raw”,或者是 cam1_enable_sensor = “sensor_mipi_raw ”(方便匹配指定sensor):
(3)在对应的 i2c 总线中定义 camera 设备,i2c0 到 i2c8,具体是哪一条 i2c 路线需要到原理图查找,同时设备在 i2c 线上的地址是 sensor 的物理地址的高七位的值(实际过程中此地址只需要不和 i2c 路线的其它设备地址冲突即可,但是为了便于查找,尽量使用高七位的地址),同时删除无关的设备配置,包括其它的camera sensor、eeprom 相关、点亮 sensor 的原理图上不存在的引脚配置。
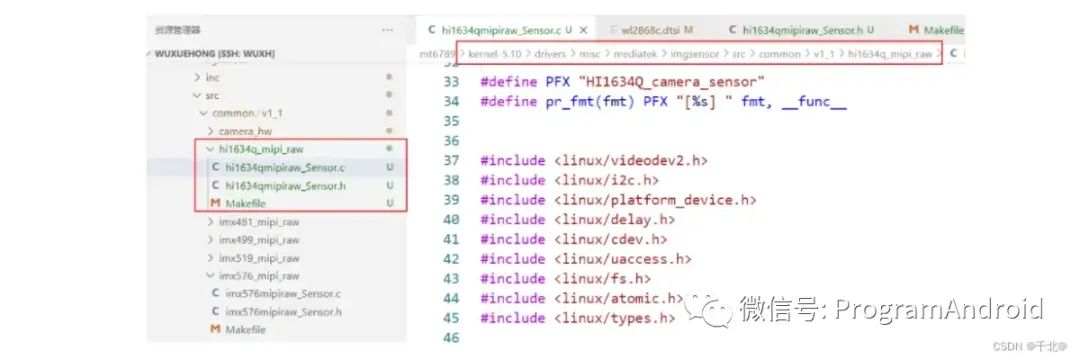
/kernel-5.10/drivers/misc/mediatek/imgsensor/src/common/v1_1
hi1634q_mipi_raw此目录下添加驱动文件,仿照类似型号 sensor 修改成自己的,然后改成自己的名字,删除 mipi_raw 下的eeprom 以及 makefile 中的 eeprom 相关,排除干扰项。
到 sensor.c 和 sensor.h 文件修改具体内容,主要包括 imgsensor_info、init_setting、preview_setting 等 mode setting 中的数据、winsize_info 数据修改,最后修改 driver 的入口函数 XXX_MIPI_RAW_SensorInit(),一般在 sensor.c 文件最下面。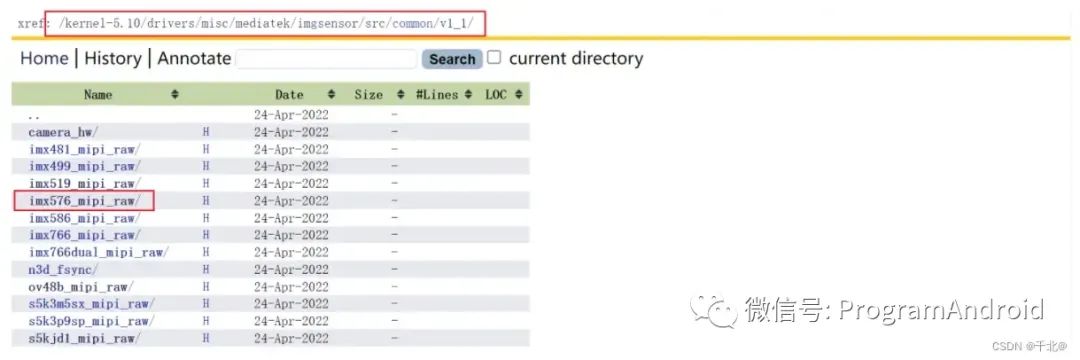

imgsensor_sensor_list.c
imgsensor_sensor_list.h
imgsensor_sensor_list.h 中添加相应的 sensor 的 init(入口函数) 的函数;
imgsensor_sensor_list.c 中添加相应的 sensor 的id、name、init(入口函数) ,注意顺序和 vendor 层相对应,此处需要注意的是最好把位置放在你对应sensor idx 的位置上,这样就不会有匹配出错的情况出现。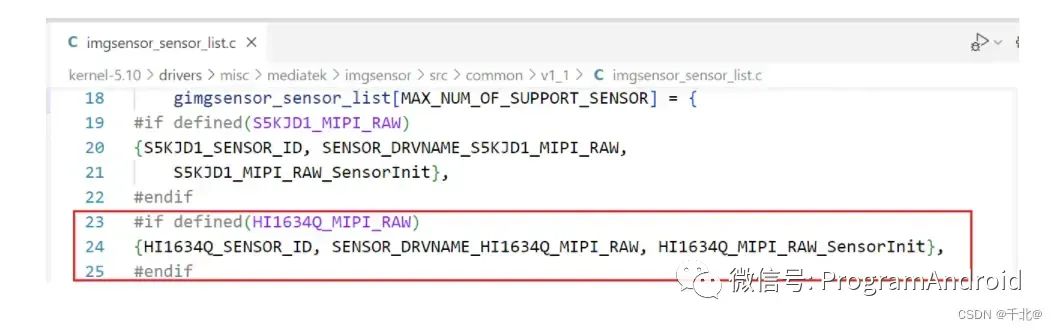
imgsensor_pwr_seq.c
此文件中修改引脚电压值以及上电延时等信息,注意 sensor driver name 的大小写,同时严格按照 sensor data 上电模块的说明,添加延时。需要注意的是 AVDD, DVDD, DOVDD 的电压需要确认是否正确,并且在上完前两路电之后第三路电最好加个 1ms 的延迟,不然可能会出现意料之外的问题;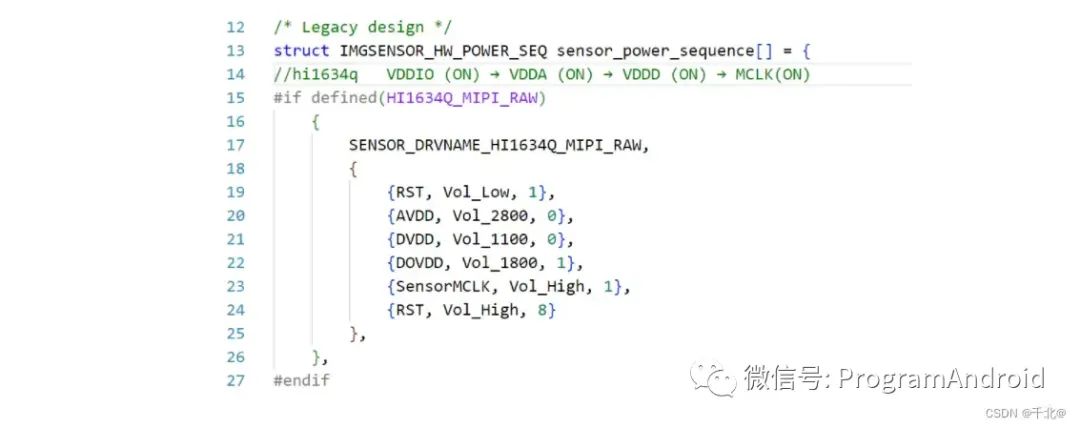
/kernel-5.10/drivers/misc/mediatek/imgsensor/src/common/v1_1/camera_hw/
imgsensor_cfg_table.c此处修改硬件配置信息,主要是三路电的配置,是 regulator 还是 gpio类型的,如果 sensor 原理图有其它引脚,也可以继续添加,同时删除原理图不存在的引脚,例如 pdn 引脚。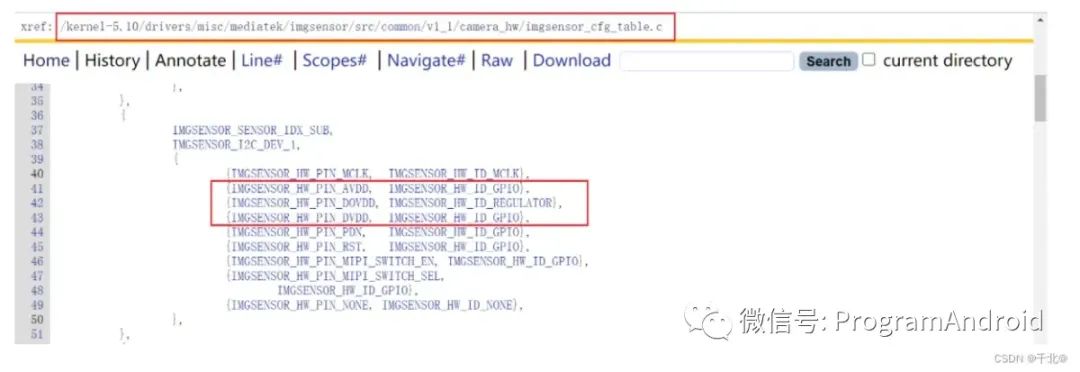
2.3、Vender Config Files
/vendor/mediatek/proprietary/custom/common/hal/imgsensor_src
sensorlist.cppNote: sensorlist.cpp 中的 SensorList[] 与 imgsensor_sensor_list.c 中的 gimgsensor_sensor_list 的 sensor 的顺序必须一致,否则 user space 和 kernel space 在通过 ioctl 传递命令 id 时会对应错误。
/vendor/mediatek/proprietary/custom/mt6789/hal/imgsensor_src
cfg_setting_imgsensor.cpp注意:kernel 底层的MCLK_0/1/2 ----> 分别对应HAL层的 MCLK_1/2/3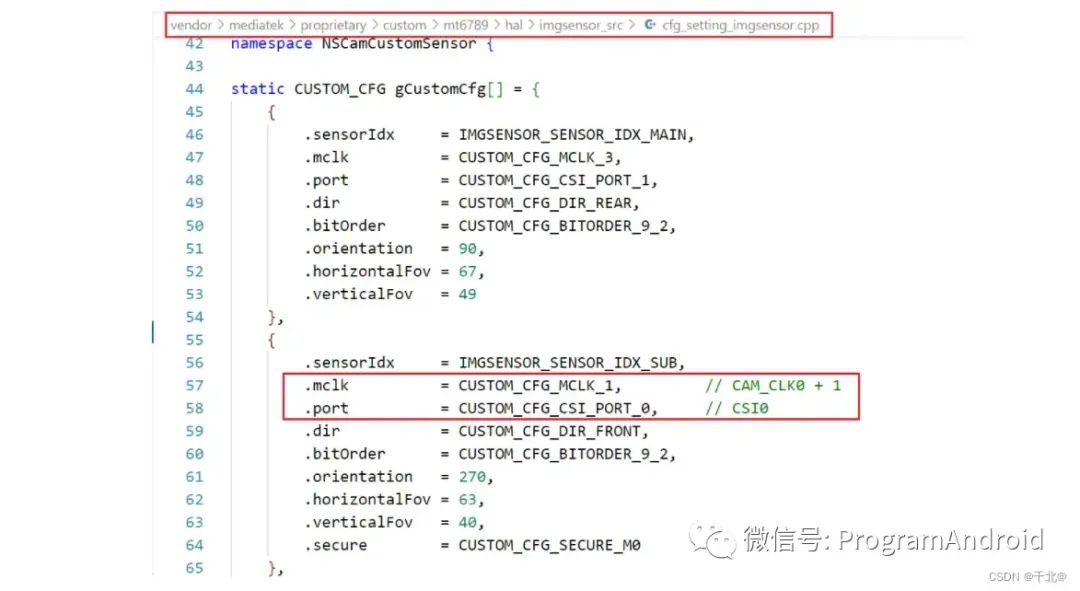
Tunning文件
Note:
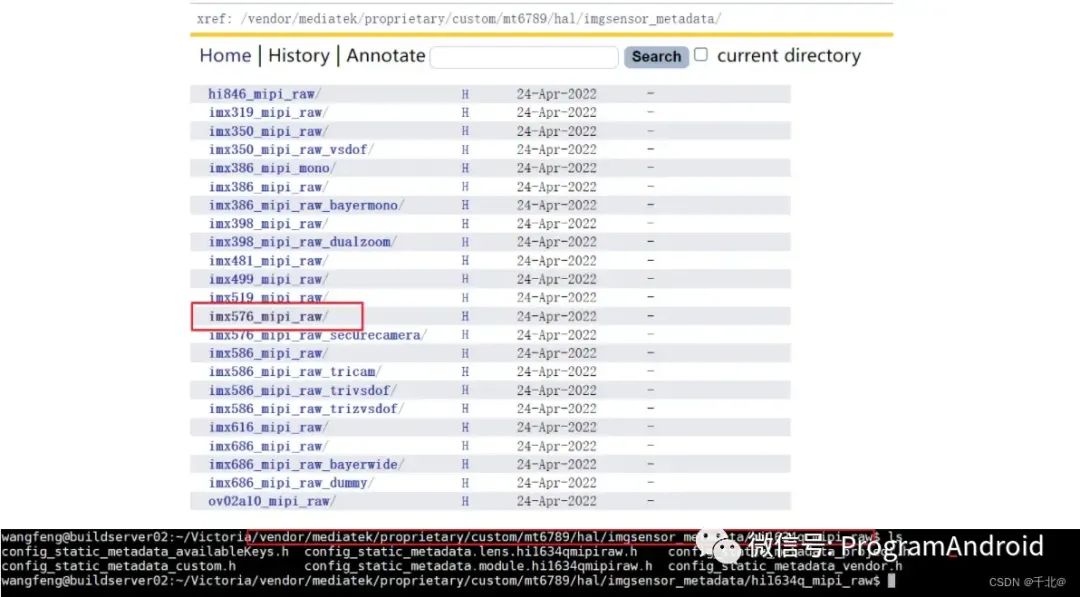
(1)Tuning Parameter 与 Metadata 可以采用下图作为参考,参考复制对应文件夹并将其中所有的Sensor Name、Sensor Id等更改成当前需要porting的sensor的对应名称,一共三处。此处需要注意:参考的sensor tunning 配置必须对应上,例如 前摄只能参考和 sub 相关的文件配置,否则会出现踩内存现象;
(2) 修改过程中注意 sensor name 和 driver 驱动的大小写问题即可,具体的 mediatek 信息不会影响点亮阶段,但会对后续的出图细节有影响,需要点亮之后再进行调试
(3)Kernel 版本号可以根据当前 Project 的 ProjectConfig.mk 中的 LINUX_KERNEL_VERSION 得知。
Driver 是 v1_1 或者其他版本可以通过 Platform 下的 Makefile 中的 COMMON_VERSION 得知。
/vendor/mediatek/proprietary/custom/mt6789/hal/imgsensor/ver1/

/vendor/mediatek/proprietary/custom/mt6789/hal/imgsensor_metadata/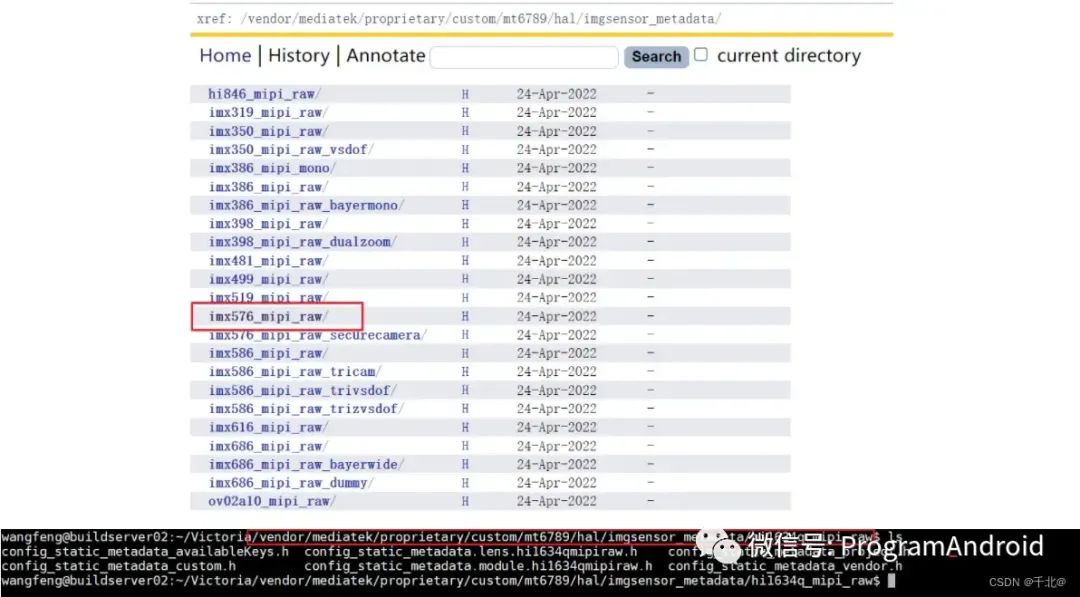
/vendor/mediatek/proprietary/custom/common/hal/imgsensor_metadata/sensor/
/vendor/mediatek/proprietary/scripts/soong/mtkcam/
mtkcamvars.go
/vendor/mediatek/proprietary/tools/dct/dws/mt6789
k6789v1_64.dwsdws(设备树相关)check gpio,一般不需要改动。
/vendor/mediatek/proprietary/hardware/mtkcam/include/mtkcam/drv/
IHalSensor.h检查一下信息是否和 kernel 层信息相同或者是否需要添加 sensor ,一般不需要改动。
三、复盘总结
通过上面的代码流程,可以知道上开机时,camera模块先会将所有的MCLK打开,然后对依次对对应的sensor进行上电,读取ID(判断I2C是否正常通讯)。这部分调试过程中遇到的问题总结如下:
3.1、注意事项
kernel 重要的是 module 的驱动代码和设备树添加,驱动代码的改动需要根据模组厂给的配置文档,一般里面包含了驱动的所有信息,包括一些 dts 配置、init setting、i2c_addr、分辨率(注意屏比例)、上电时序等一些重要信息
device 中 config.mk 文件修改后,要将 out 相关所有目录删除,再全部编译,否则会导致踩内存的橙色界面
vender 参考的 sensor tunning 配置必须对应上,例如 前摄只能参考和 sub 相关的文件配置,否则会出现踩内存现象
参考 sensor 进行复制替换时注意大小写的问题!!!
注意排除干扰项、无关项,单独点亮一颗 sensor 时,先到 config 文件删除其余无关的 sensor 驱动,eeprom 相关的也删除,camera 设备原理图没有的引脚也要到 dtsi 和上电相关的文件 cfg_table.c 中删除。
3.2、ID读取不到,I2C不通
检查上电时序,3项电压(AVDD/DVDD/IOVDD)是否正确;
检查 kernerl 层的 imgsensor_sensor_list.c 和 vendor 层的 sensorlist.cpp 中的位置是否一致。
I2C地址及通道设置是否正确;
确认 i2c 可以正常通信,通过万用表看看有无电流,万用表也可以用来测量配置的 regulator 是否正确,测量电压时首先屏蔽 imgsensor_hw.c 中的下电代码,最后编译完成,通过 i2c write/read 工具读写寄存器,将对应 regulator 的所有电源全部打开,之后测量电压。
检查 cfg_setting_imgsensor.cpp 中 MCLK 和 HW 链接配置是否正确;
如果还是无法读到 sensor id,先熟悉以下驱动代码以及上电代码,通过打印 log 的方式检查具体执行到哪个模块:camera 的入口在 imgsensor.c 最下方的 init 函数,通过它绑定一个 platform 的驱动,我们在到驱动对应的 probe 函数下看它如何执行,主要包括设备的匹配注册,imgsensor_hw_init,imgsensor_proc_init,sensorlist_init,其中上电部分的代码通过 imgsensor_hw_init 到达 imgsensor_hw.c 文件,获取硬件信息配置之后分别到平台定义的标准化接口 mclk.c、regulator.c、gpio.c 中执行标准化接口,这样一路打印 log,大概率会发现上电过程哪里出现问题,根据问题去检查对应模块。
读到 sensor id 之后,如果相机无法预览,需要到 imgsensor.c 以及驱动代码中检查 open 之后的执行情况,check 驱动中的 init_setting 、mode setting 、imgsensor_winsize_info 是否正确。
3.3、Camera 启动时间过长
检查 Sensor 上电时序要求的延时,是否有偏长的情况;
去掉多余的 I2C 地址,因为大部分驱动会多添加一些地址;
OTP的加载调整到每次开机时第一次打开加载,之后不加载;
sensorInit如果时间过长,可以调节I2C speed(400->1000);
原文链接:https://blog.csdn.net/Sugar_wolf/article/details/127512088
【腾讯文档】Camera学习知识库
https://docs.qq.com/doc/DSWZ6dUlNemtUWndv
友情推荐:
Android 开发干货集锦
至此,本篇已结束。转载网络的文章,小编觉得很优秀,欢迎点击阅读原文,支持原创作者,如有侵权,恳请联系小编删除,欢迎您的建议与指正。同时期待您的关注,感谢您的阅读,谢谢!

点击阅读原文,为大佬点赞!