作者:非妃是公主
专栏:《智能优化算法》
博客地址:https://blog.csdn.net/myf_666
个性签:顺境不惰,逆境不馁,以心制境,万事可成。——曾国藩
文章目录
- 专栏推荐
- 序
- 一、概论
- 二、粒子群算法原理
- 1. 算法原理
- 2. 机理分析
- 三、算法流程
- 1. 算法伪代码
- 2. 算法流程图
- 四、参数设置
- 1. 粒子种群规模 N N N
- 2. 惯性权重 ω \omega ω
- Ⅰ. 固定权重
- Ⅱ. 时变权重
- 3. 加速常数 c 1 c_1 c1和 c 2 c_2 c2
- 4. 粒子最大速度 v m a x v_{max} vmax
- 5. 停止准则
- 6. 邻域结构的设定
- 7. 边界条件处理
- 五、仿真实例
- 1. 问题
- 2. 分析
- 3. matlab代码实现
- 4. 效果展示
- 六、算法改进
- 1. 压缩因子粒子群算法
- 2. 离散粒子群算法
- the end……

专栏推荐
| 专栏名称 | 专栏地址 |
|---|---|
| 软件工程 | 专栏——软件工程 |
| 计算机图形学 | 专栏——计算机图形学 |
| 操作系统 | 专栏——操作系统 |
| 软件测试 | 专栏——软件测试 |
| 机器学习 | 专栏——机器学习 |
| 数据库 | 专栏——数据库 |
| 算法 | 专栏——算法 |
序
粒子群算法也是一种智能优化算法,该算法作为一种群体智能算法,主要借鉴了鸟群的思想(那为什么不叫鸟群算法,非要叫粒子群算法呢?我不得而知,感兴趣的朋友可以在评论区告诉我,我会标明出处后进行补充)。
一、概论
粒子群优化算法对鸟群捕食行为进行研究:一群鸟在区域中随机搜索食物,所有鸟知道自己距离食物的距离。
在粒子群算法中,每一个潜在解对应一只小鸟,可能是不考虑这只小鸟的重量和大小等物理特性,就抽象它为一个点,所以叫做粒子。
粒子群算法首先在给定的空间中随机初始化粒子群,待优化问题的变量决定了解空间的维数。每个粒子有了初始位置和速度后,通过迭代,我们就可以确定它的下一次的位置。
在每一次迭代中,每个粒子通过跟踪两个“极值”来更新自己在解空间中的空间位置和飞行速度:一个极值就是单个粒子本身在迭代过程中找到的最优解粒子,这个粒子叫做个体极值。另一个极值是种群所有粒子在迭代过程中找到的最优解粒子,叫做全局极值。这个方法叫做全局粒子群算法,也是粒子群算法的 v1 版本,但是由于它考虑了全局种群,因此非常容易陷入到局部最优。
对应的改进方法是,只用其中一部分作为邻居粒子,这些邻居粒子中的极值就是局部极值,用它来代替上面的全局极值,这种方法就叫做局部粒子群算法,也是粒子群算法的 v2 版本。
二、粒子群算法原理
1. 算法原理
在一个D维的目标搜索空间中,N个粒子组成一个种群,其中第i个粒子表示为一个D维的向量:
X i = ( x i 1 , x i 2 , . . . , x i D ) , i = 1 , 2 , . . . , N X_i=(x_{i1},x_{i2},...,x_{iD}),\quad i=1,2,...,N Xi=(xi1,xi2,...,xiD),i=1,2,...,N
第i个粒子的“飞行”速度也是一个D维的向量,记为:
V i = ( v i 1 , v i 2 , . . . , v i D ) , i = 1 , 2 , . . . N V_i=(v_{i1},v_{i2},...,v_{iD}),\quad i=1,2,...N Vi=(vi1,vi2,...,viD),i=1,2,...N
迄今为止,第i个粒子的个体最优位置:
p b e s t = ( p i 1 , p i 2 , . . . , p i D ) , i = 1 , 2 , . . . N p_{best}=(p_{i1},p_{i2},...,p_{iD}),\quad i=1,2,...N pbest=(pi1,pi2,...,piD),i=1,2,...N
迄今为止,整个粒子群的最优位置:
g b e s t = ( g 1 , g 2 , . . . , g D ) g_{best}=(g_1,g_2,...,g_D) gbest=(g1,g2,...,gD)
对于每一次迭代,粒子根据如下公式进行更新:
v i j ( t + 1 ) = v i j ( t ) + c 1 r 1 ( t ) [ p i j ( t ) − x i j ( t ) ] + c 2 r 2 ( t ) [ g i j ( t ) − x i j ( t ) ] v_{ij}(t+1)=v_{ij}(t)+c_1r_1(t)[p_{ij}(t)-x_{ij}(t)]+c_2r_2(t)[g_{ij}(t)-x_{ij}(t)] vij(t+1)=vij(t)+c1r1(t)[pij(t)−xij(t)]+c2r2(t)[gij(t)−xij(t)]
x i j ( t + 1 ) = x i j ( t ) + v i j ( t + 1 ) x_{ij}(t+1)=x_{ij}(t)+v_{ij}(t+1) xij(t+1)=xij(t)+vij(t+1)
其中, c 1 c_1 c1和 c 2 c_2 c2为学习因子,就是2个常数,自己设定;
r 1 , r 2 r_1,r_2 r1,r2为 [ 0 , 1 ] [0,1] [0,1]范围内的均匀随机数。
i = 1 , 2 , . . . , N P ; i=1,2,...,NP; i=1,2,...,NP;表示种群数量, j = 1 , 2 , . . . , D j=1,2,...,D j=1,2,...,D表示种群维度。
2. 机理分析
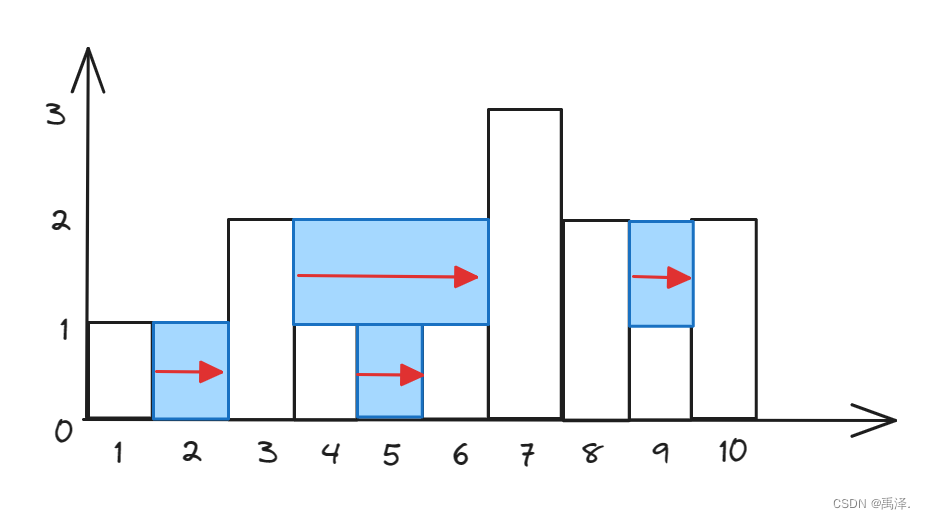
观察速度更新的公式,主要分为三个部分,进行机理分析,如下:
第一部分:惯性、动量部分。保持原有的运动趋势。
第二部分:认知部分。根据以往的经验,忘自己的个体最优值附近进行一定的偏移。
第三部分:社会部分。反映了粒子间的合作与知识共享,向全局最优值附近有一定的偏向。
三、算法流程
1. 算法伪代码
- 初始化种群。包括:NP, x i x_i xi和速度 v i v_i vi。
- 计算每个粒子适应度fit[i]
- 对每个粒子,用它的适应度值fit[i]和个体极值 p b e s t ( i ) p_{best}(i) pbest(i)比较,如果 f i t [ i ] < p b e s t fit[i]<p_{best} fit[i]<pbest,那么就更新 p b e s t p_{best} pbest。
- 将fit[i]和全局极值 g b e s t g_{best} gbest比较。如果 f i t [ i ] < g b e s t fit[i]<g_{best} fit[i]<gbest,则更新 g b e s t g_{best} gbest。
- 迭代更新粒子的速度 v i v_i vi得到 v i + 1 v_{i+1} vi+1。
- 迭代更新 x i x_i xi得到 x i + 1 x_{i+1} xi+1
- 对 x i + 1 x_{i+1} xi+1进行边界处理。
- 判断算法是否满足终止条件。如果满足,结束算法。不满足,返回步骤2.
2. 算法流程图
四、参数设置
1. 粒子种群规模 N N N
一般设置粒子数为20~50。
-
对于大部分问题10个粒子即可取得很好的结果;
-
对于复杂的问题,粒子数量可以取到100或200。
另外,粒子数目越大,搜索空间越大,全局搜索能力更强,运行时间也越长。
2. 惯性权重 ω \omega ω
Ⅰ. 固定权重
在进化过程中保持不变,一般取值为 [ 0.8 , 1.2 ] [0.8,1.2] [0.8,1.2].
Ⅱ. 时变权重
粒子在不同阶段拥有不同的搜索和开发能力。
ω = ω m a x − ( ω m a x − ω m i n ) ⋅ t T m a x \omega=\omega_{max}-\frac{(\omega_{max}-\omega_{min})\cdot t}{T_{max}} ω=ωmax−Tmax(ωmax−ωmin)⋅t
其中, T m a x T_{max} Tmax表示最大进化代数; ω m i n \omega_{min} ωmin表示最小惯性权重; ω m a x \omega_{max} ωmax表示最大惯性权重; t t t表示当前迭代次数。在大多数应用中 ω m a x = 0.9 \omega_{max}=0.9 ωmax=0.9, ω m i n = 0.4 \omega_{min}=0.4 ωmin=0.4
3. 加速常数 c 1 c_1 c1和 c 2 c_2 c2
一般设置 c 1 = c 2 = 1.5 c_1=c_2=1.5 c1=c2=1.5.
4. 粒子最大速度 v m a x v_{max} vmax
设定 v m a x v_{max} vmax和调整惯性权重是等效的,所以 v m a x v_{max} vmax一般用于对种群初始化进行设定,即将 v m a x v_{max} vmax设定为每维变量的变化范围,二不再对最大速度进行细致的选择及调节。
5. 停止准则
最大迭代次数、计算精度或最优解的最大停滞部署 △ t \bigtriangleup t △t.
6. 邻域结构的设定
-
全局最优解收敛块,但回陷入局部最优。
-
局部版本粒子群算法,收敛慢,但不容易陷入局部最优。
-
通常的做法是,全局粒子群算法寻找到最优解的大致范围,然后采用局部粒子群算法在最优点附近进行精细搜索。
7. 边界条件处理
当朝贡国最大位置限制 x m a x x_{max} xmax和最大速度限制 v m a x v_{max} vmax时,在范围内随机产生一个数值代替,或者将其设置为最大值,即边界吸收。
五、仿真实例
1. 问题
求下列函数的最小值,其中x的维数n=10。
f ( x ) = ∑ i = 1 n x i 2 , ( − 20 ≤ x i ≤ 20 ) f(x)=\sum_{i=1}^{n}x_i^2,\quad(-20\leq x_i \leq 20) f(x)=i=1∑nxi2,(−20≤xi≤20)
2. 分析
函数只有一个极小点 x = ( 0 , 0 , . . . 0 ) x=(0,0,...0) x=(0,0,...0),理论最小值 f ( 0 , 0 , . . . 0 ) = 0 f(0,0,...0)=0 f(0,0,...0)=0。
- 初始化种群。N=100,粒子维数10,最大迭代次数200
参数设置如下表所示:
| 参数名称 | 参数大小 |
|---|---|
| 种群大小 N N N | 100 |
| 维度 D D D | 10 |
| 最大迭代次数 | 200 |
| 学习因子 c 1 = c 2 c_1=c_2 c1=c2 | 1.5 |
| 惯性权重 ω \omega ω | 0.8 |
| X m a x X_{max} Xmax | 20 |
| X m i n X_{min} Xmin | 20 |
| V m a x V_{max} Vmax | 10 |
- 利用上述推导描述的算法框架进行实现。
3. matlab代码实现
核心代码如下,我已经逐行注释,可以自行阅读代码流程。
%%%%%%%%%%%%%%%%%粒子群算法求函数极值%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%初始化%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clear all; %清除所有变量
close all; %清图
clc; %清屏
N=100; %群体粒子个数
D=10; %粒子维数
T=200; %最大迭代次数
c1=1.5; %学习因子1
c2=1.5; %学习因子2
w=0.8; %惯性权重
Xmax=20; %位置最大值
Xmin=-20; %位置最小值
Vmax=10; %速度最大值
Vmin=-10; %速度最小值
%%%%%%%%%%%%%%%%初始化种群个体(限定位置和速度)%%%%%%%%%%%%%%%%
x=rand(N,D) * (Xmax-Xmin)+Xmin; % 初始化粒子位置
v=rand(N,D) * (Vmax-Vmin)+Vmin; % 初始化粒子速度
%%%%%%%%%%%%%%%%%%初始化个体最优位置和最优值%%%%%%%%%%%%%%%%%%%
p=x; % 初始化个体最优位置
pbest=ones(N,1); % 初始化个体最优值
for i=1:N
pbest(i)=func1(x(i,:)); % 计算个体适应度(最优)值
end
%%%%%%%%%%%%%%%%%%%初始化全局最优位置和最优值%%%%%%%%%%%%%%%%%%
g=ones(1,D); % 初始化全局最优位置
gbest=inf; % 将全局最好点设置为无穷大
for i=1:N % 更新全局最优解
if(pbest(i)<gbest) % 如果找到
g=p(i,:); % 全局最优位置
gbest=pbest(i); % 全局最优值
end
end
gb=ones(1,T); % 追踪 T 次全局最优解
%%%%%%%%%%%按照公式依次迭代直到满足精度或者迭代次数%%%%%%%%%%%%%
for i=1:T % 开始迭代
for j=1:N % 遍历所有个体
%%%%%%%%%%%%%%更新个体最优位置和最优值%%%%%%%%%%%%%%%%%
if (func1(x(j,:))<pbest(j))
p(j,:)=x(j,:); % 更新个体最优位置
pbest(j)=func1(x(j,:)); % 更新个体最优值
end
%%%%%%%%%%%%%%%%更新全局最优位置和最优值%%%%%%%%%%%%%%%
if(pbest(j)<gbest)
g=p(j,:); % 更新全局最优位置
gbest=pbest(j); % 更新全局最优值
end
%%%%%%%%%%%%%%%%%跟新位置和速度值%%%%%%%%%%%%%%%%%%%%%
v(j,:)=w*v(j,:)+c1*rand*(p(j,:)-x(j,:))...
+c2*rand*(g-x(j,:)); % 更新速度
x(j,:)=x(j,:)+v(j,:); % 更新位置
%%%%%%%%%%%%%%%%%%%%边界条件处理%%%%%%%%%%%%%%%%%%%%%%
for ii=1:D % 遍历所有维度
if (v(j,ii)>Vmax) || (v(j,ii)< Vmin)
v(j,ii)=rand * (Vmax-Vmin)+Vmin; % 处理速度边界
end
if (x(j,ii)>Xmax) || (x(j,ii)< Xmin)
x(j,ii)=rand * (Xmax-Xmin)+Xmin; % 处理位置边界
end
end
end
%%%%%%%%%%%%%%%%%%%%记录历代全局最优值%%%%%%%%%%%%%%%%%%%%%
gb(i)=gbest;
end
disp('最优个体:')
disp(g); % 最优个体
disp('最优值:')
disp(gb(end)); % 最优值
figure
plot(gb)
xlabel('迭代次数');
ylabel('适应度值');
title('适应度进化曲线')
4. 效果展示
算法都收敛性是较好的,最优值变化曲线如下:

最优个体及最优值如下:

六、算法改进
1. 压缩因子粒子群算法
Clerc 等人提出利用 约束因子 控制系统行为的最终收敛,该方法可以有效搜索不同的区域,并且得到高质量的解。压缩因子的速度更新方法如下:
v i j ( t + 1 ) = λ ⋅ v i j ( t ) + c 1 r 1 ( t ) [ p i j ( t ) − x i j ( t ) ] + c 2 r 2 ( t ) [ p g j ( t ) − x i j ( t ) ] v_{ij}(t+1)=\lambda \cdot v_{ij}(t)+c_1r_1(t)[p_{ij}(t)-x_{ij}(t)]+c_2r_2(t)[p_{gj}(t)-x_{ij}(t)] vij(t+1)=λ⋅vij(t)+c1r1(t)[pij(t)−xij(t)]+c2r2(t)[pgj(t)−xij(t)]
式中, λ \lambda λ为压缩因子:
λ = 2 ∣ 2 − φ − ( φ 2 − 4 φ ) ∣ \lambda=\frac{2}{|2-\varphi-\sqrt{(\varphi^2-4\varphi)}|} λ=∣2−φ−(φ2−4φ)∣2
其中,
φ = c 1 + c 2 \varphi=c_1+c_2 φ=c1+c2
使用具有约束因子的粒子群算法具有更快的收敛速度。
2. 离散粒子群算法
主要针对速度,将连续的速度转化为离散的值,进而进行位置的更新,主要公式如下:
s ( v i , j ) = 1 1 + e − v i , j s(v_{i,j})=\frac{1}{1+e^{-v_{i,j}}} s(vi,j)=1+e−vi,j1
x i j = { 1 , r < s ( v i , j ) 0 , 其它 x_{ij}=\begin{cases} 1,& r< s(v_{i,j})\\ 0,& 其它 \end{cases} xij={1,0,r<s(vi,j)其它
其中, r r r是 U ( 0 , 1 ) U(0,1) U(0,1)分布中产生的随机数。1
the end……
粒子群算法到这里就要结束啦~~到此既是缘分,欢迎您的点赞、评论、收藏!关注我,不迷路,我们下期再见!!
😘😘😘 我是Cherries,一位计算机科班在校大学生,写博客用来记录自己平时的所思所想!
💞💞💞 内容繁杂,又才疏学浅,难免存在错误,欢迎各位大佬的批评指正!
👋👋👋 我们相互交流,共同进步!
注:本文由
非妃是公主发布于https://blog.csdn.net/myf_666,转载请务必标明原文链接:https://blog.csdn.net/myf_666/article/details/129405198
包子阳,智能优化算法及其matlab实例.电子工业出版社. ↩︎