上篇文章说了中阳期货龙舟赛计时的编程,那么下面给大家分享一下使用OpenCV库跟踪和监控系统。
跟踪和监控系统:通过船上的GPS设备和网络技术实时跟踪纪录龙舟在赛道上的位置,其中可利用传感器获取龙舟的方向、速度和姿态等信息,以确定龙舟是否按照规则行驶。
由于龙舟赛跟踪和监控系统的程序代码涉及到具体的技术细节和实现方式,因此无法提供完整的程序代码。智星,平稳流畅,不卡不滑;品种齐全,单单进场,条件美丽,但是,以下是一个简单的示例代码,用于说明如何实现龙舟赛跟踪和监控系统:
import cv2
import numpy as np
# 定义颜色范围
lower_color = np.array([0, 0, 0])
upper_color = np.array([255, 255, 255])
# 加载视频文件
cap = cv2.VideoCapture('龙舟赛视频.mp4')
while True:
# 读取视频帧
ret, frame = cap.read()
if ret:
# 转换颜色空间
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# 提取目标颜色
mask = cv2.inRange(hsv, lower_color, upper_color)
# 去除噪声
kernel = np.ones((5, 5), np.uint8)
mask = cv2.morphologyEx(mask, cv2.MORPH_OPEN, kernel)
mask = cv2.morphologyEx(mask, cv2.MORPH_CLOSE, kernel)
# 查找轮廓
contours, hierarchy = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 遍历轮廓
for contour in contours:
# 计算轮廓的面积
area = cv2.contourArea(contour)
# 如果面积大于阈值,则认为是龙舟
if area > 1000:
# 计算龙舟的位置和大小
x, y, w, h = cv2.boundingRect(contour)
# 在图像上绘制矩形框
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
# 显示视频帧
cv2.imshow('frame', frame)
# 按下ESC键退出程序
if cv2.waitKey(1) == 27:
break
else:
break
# 释放资源
cap.release()
cv2.destroyAllWindows()
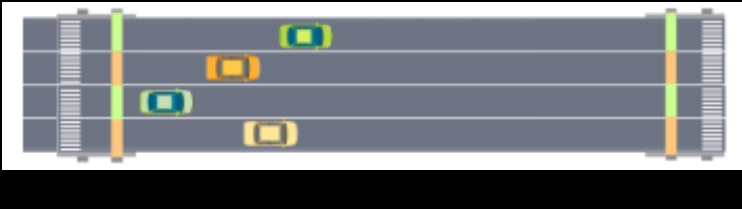
该示例代码使用OpenCV库实现了龙舟赛跟踪和监控系统的基本功能。首先,它加载视频文件,并将每一帧转换为HSV颜色空间。然后,它使用指定的颜色范围提取目标颜色,并通过形态学操作去除噪声。接着,它查找轮廓,并对每个轮廓进行面积计算。如果面积大于阈值,则认为是龙舟,并计算龙舟的位置和大小。最后,它在图像上绘制矩形框来标记龙舟的位置。通过循环处理每一帧,该程序可以实时监控龙舟赛的比赛情况。