摘要:针对工作范围在5×~1.3×
Pa,控制精度在0.1%~0.5%读数的全量程真空压力综合测量系统技术要求,本文提出了稳压室真空压力精密控制的技术方案。为保证控制精度,基于动态平衡法,技术方案在高真空、低真空和正压三个区间内分别采用了独立的控制方法和不同技术,所涉及的关键部件是微小进气流量调节装置、中等进气流量调节电动针阀、排气流量调节电动球阀、正压压力电子调节器和真空压力PID控制器。配合相应的高精度真空压力传感器,此技术方案可以达到控制精度要求,并已得到过试验验证。
原文阅读:(PDF格式)
1. 项目概述
真空压力综合测量系统是一个用于多规格真空传感器测量校准的高精度动态真空压力测量系统,主要由一套真空稳压室、一套电容薄膜真空测量模块、一套冷阻复合真空测量模块、一套高精度真空测量模块,其技术要求如下:
(1)真空稳压室体积为1L;
(2)真空稳压室含有10路VCR转接接头;
(3)真空稳压室加热烘烤温度范围:室温到200℃;
(4)冷阻复合真空测量模块量程为(5×10-7~1×105)Pa;
(5)冷阻复合真空测量模块含有通讯接口,提供0~10V电压信号;
(6)电容薄膜真空测量模块量程为10Torr,测量精度为0.5%;
(7)电容薄膜真空测量模块接口为8VCR接口;
(8)电容薄膜真空测量模块含有通讯接口,提供0~10V电压信号;
(9)高精度真空测量模块量程为0.1~10000Torr;
(10)高精度真空测量模块测量精度为读数的0.1%;
(11)配备高精度真空测量模块的控制器,满足真空测量模块的使用要求,包含通讯接口。
从上述技术要求可以看出,整个系统的真空压力范围覆盖了负压和正压,具体的全量程覆盖范围用绝对压力表示为5×10-7~1.3×106Pa,其中包含了高真空(5×10-7~1.3×10-1Pa)、低真空(1.3×10-1~1.3×105Pa)和正压(1.3×105~1.3×106Pa)的精密测量和控制,更具体的是要在一个稳压室内实现三个真空压力范围的不同测量和控制精度。以下将对这些技术要求的实现,特别是对真空压力的精密控制技术方案和相关关键配套装置给出详细说明,其他通用性的装置,如机械泵和分子泵则不进行详细描述。
2. 高精度宽量程真空压力控制技术方案
真空压力控制系统的技术方案基于动态平衡法控制原理,即在一个密闭容器内,通过调节进气和出气流量并达到相应的平衡状态来实现真空压力设定点的快速控制。在动态平衡法实际应用中,只要配备相应精度的传感器、执行器和控制器,可以顺利实现设计精度的控制。为此,针对本项目提出的技术指标,基于动态平衡法,本文所提出的具体技术方案如图1所示。

对应于项目技术指标中的高真空、低真空和正压压力控制要求,图1所示的真空压力控制系统由三个相对独立的控制系统来实现项目技术要求,具体内容如下:
2.1 高真空度控制系统
基于动态平衡法原理,对于高真空控制,需要采用上游控制模式,在分子泵全速抽气条件下,需要在上游(进气端)通过精密调节微小进气流量,来实现高真空范围内任意真空度设定点的恒定控制。如图1所示,高真空控制系统主要包括了冷阻真空计、微量进气调节装置和真空压力控制器,这三个装置构成一个闭环控制系统,它们的精度决定了高真空度的最终控制精度。
需要说明的是高真空和低真空控制系统公用了一套机械泵和分子泵,高真空控制时需要分别使用机械泵和分子泵,而在低真空控制时仅使用机械泵。
对于高真空传感器而言,可根据设计要求选择相应量程和测量精度的真空计,其测量精度最终决定了控制精度,一般而言,控制精度会差于测量精度。
在高真空控制中,关键技术是精密调节微小进气流量。如图1所示,微量进气调节装置有电动针阀、泄漏阀和压力调节器组成,可实现0.005mL/min或更低的微小进气流量调节。
微量气体调节时,首先通过压力调节器来改变泄漏阀的进气压力,使泄漏阀流出相应的微小流量气体,然后通过调节电动针阀来改变进入真空稳压室的气体流量。压力调节器和电动针阀的控制则采用的是24位AD、16位DA和0.01%最小输出百分比的双通道真空压力PID控制器。
2.2 低真空度控制系统
基于动态平衡法原理,对于低真空控制,则需要分别采用上游(进气端)和下游(排气端)两种控制模式。如图1所示,两种控制模式的具体内容如下:
在低真空的0.01~10Torr范围内,需要采用10Torr量程的电容真空计,并在机械泵全速抽气的条件下(电动球阀全开),通过动态改变电动针阀的开度来调节进气流量以实现设定真空度的精密控制。同时在电动针阀的进气端增加一个压力调节器以保证电动针阀进气压力的稳定。
在低真空的10~760Torr范围内,需要采用1000Torr量程的电容真空计,并在固定电动针阀开度和机械泵全速抽气的条件下,通过动态改变电动球阀的开度来调节排气流量以实现设定真空度的精密控制。
同样,在低真空控制系统中也同样采用了高精度的双通道真空压力控制器,两路输入通道分别接10Torr和1000Torr的薄膜电容真空计,两路输出控制通道分别接电动针阀和电动球阀,由此可实现两个低真空范围内的真空度精密控制。
尽管电容真空计可以达到0.2%的测量精度,但要实现项目0.5%的控制精度,需要电动针阀和电动球阀具有很快的响应速度,电动针阀要求小于1s,而电动球阀要求小于3s,另外还要求真空压力控制器也同样具有很高的测量和调节精度,这些要求同样适用于高真空度控制。
2.3 正压压力控制系统
对于正压压力控制采用了集成式动态平衡法压力调节器,并采用了串级控制方法。如图1所示,正压控制系统由压力调节器、压力传感器和真空压力控制器构成的双闭环控制回路构成。采用相应精度和量程的压力传感器和压力调节器可实现0.1%以内的控制精度。
3. 低真空控制解决方案考核试验和结果
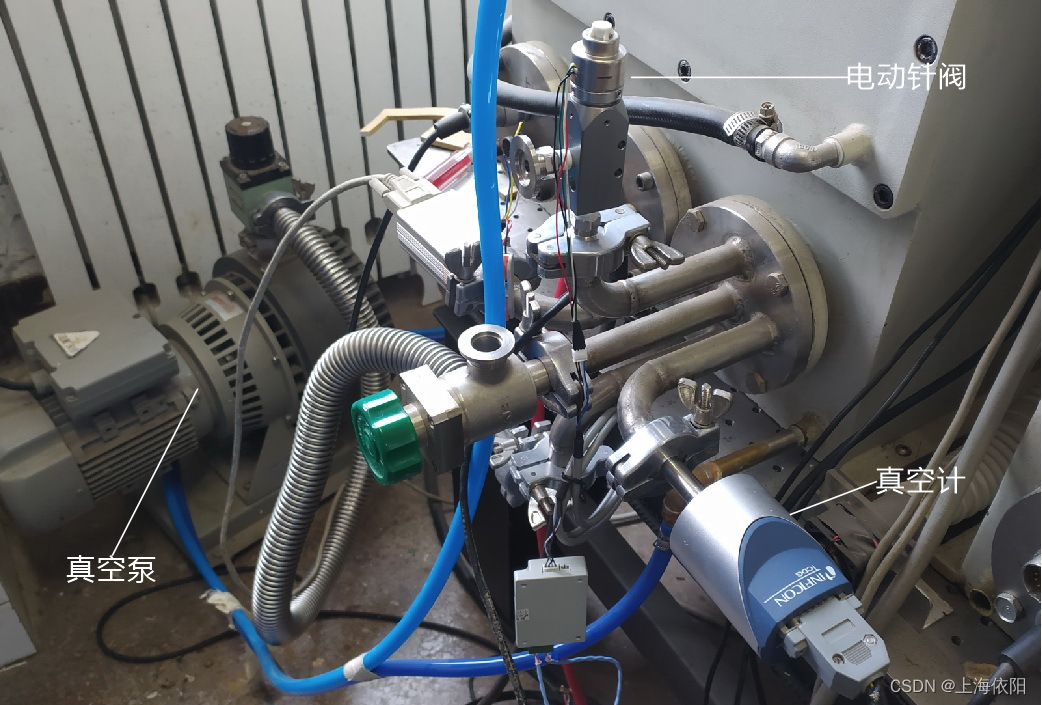
对于低真空精密控制解决方案,我们进行过相应的考核试验。低真空上游和下游控制考核试验装置如图2和图3所示,其中分别采用了10Torr和1000Torr薄膜电容真空计。

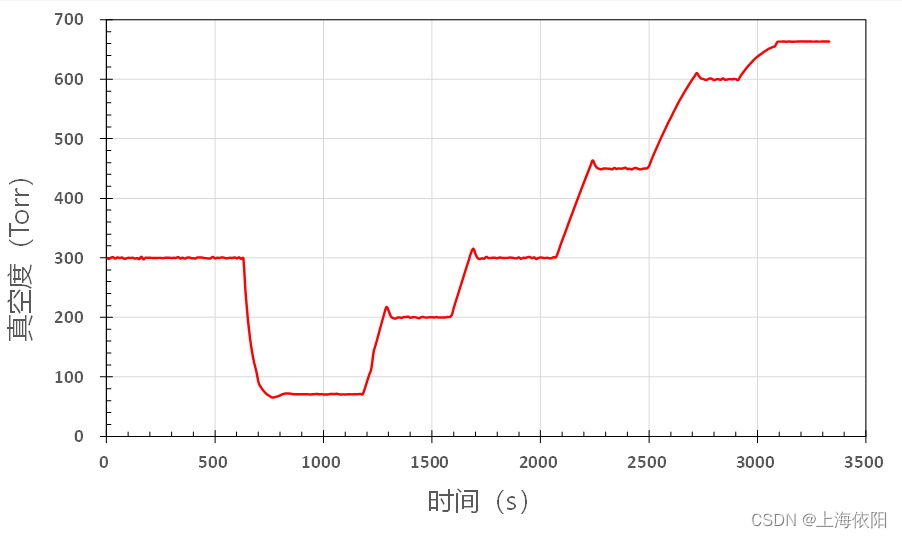
上游和下游不同真空度设定点的控制结果如图4和图5所示。

上游和下游不同真空度设定点的恒定控制波动率如图6和图7所示。
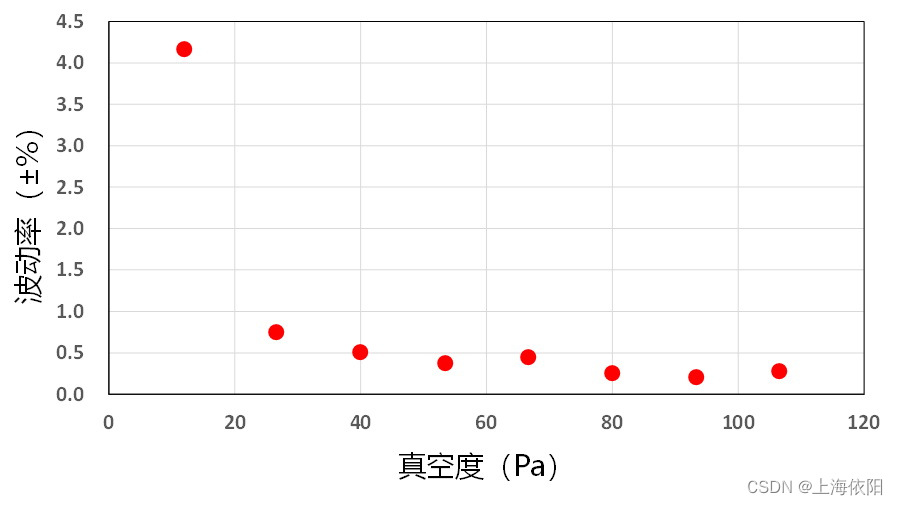

通过上下游两种控制模式的考核试验,可得出以下结论:
(1)配备有目前型号电动针阀、电动球阀和 PID 控制器的低真空控制系统,在采用了薄膜电容真空计条件下,恒定真空度(压强)控制的波动率可轻松的保持在±0.5%以内。
(2)由于真空控制系统中进气或出气流量与真空度并不是一个线性关系,因此在整个测控范围内采用一组 PID 参数并不一定合适,为了使整个测控范围内的波动率稳定,还需采用 2 组或2组以上的 PID 参数。
4. 正压压力控制解决方案考核试验和结果
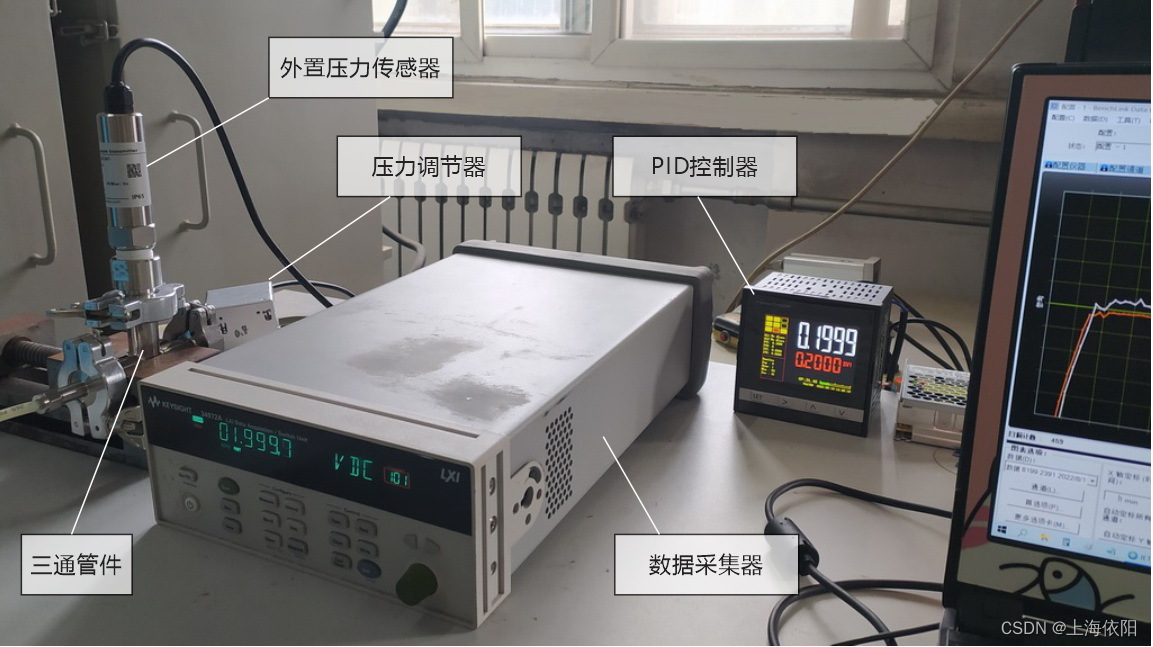
对于正压压力控制解决方案,同样进行过相应的考核试验。正压压力精密控制考核试验装置如图8所示,其中采用了测量精度为0.05%的压力传感器。
考核试验的压力范围为表压0.1~0.6MPa,选择不同的设定点进行恒定控制并检测其控制的稳定性。全量程的正压压力控制结果如图9所示。

为了更直观的演示正压压力控制精度,将每个压力设定点时的控制过程进行单独显示,以检测测定正压压力的稳定性,图10显示了不同正压设定点恒定控制时的正压压力和控制电压信号的变化曲线。
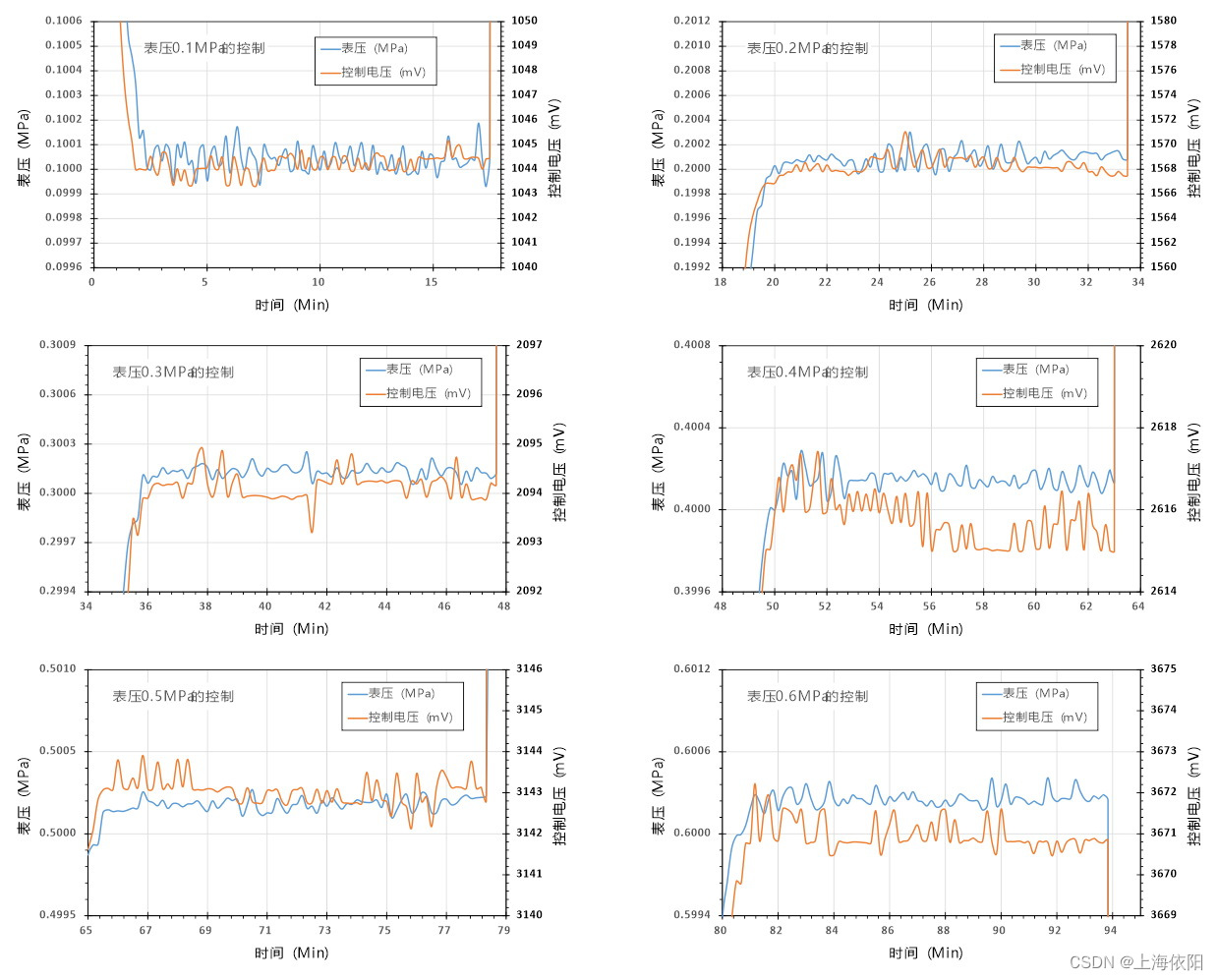
通过所用的正压压力精密控制解决方案和考核试验结果,证明了此解决方案完全能够实现0.1%高精度的正压压力控制,具体结论如下:
(1)采用串级控制和模式,并结合后外置超高精度(0.05%)的压力传感器和真空压力控制器,完全可以有效提高压力调节器的压力控制精度,可实现0.1%超高精度的压力控制。
(2)如果选择更合适和狭窄的压力控制范围,还可以达到0.05%的更高控制精度。
(3)高精度0.1%的压力控制过程中,真空压力控制器的测量精度、控制精度和浮点运算是决定整体控制精度的关键技术指标,解决方案中采用的24位ADC、16位DAC和高精度浮点运算0.01%的输出百分比,证明完全可以满足这种高精度的控制需要。
5. 总结
针对真空压力综合测量系统对高真空、低真空和正压精密控制的技术要求,解决方案可以很好的实现精度为0.1%~0.5%读数的精密控制,考试验证试验也证实此控制精度。
更重要的是,解决方案提出了高真空度的精密控制方法和控制系统配置,这将解决在高真空度范围内的任意设定点下的恒定控制难题,为高真空度范围的计量校准测试提供准确的标准源。