LabVIEW开发经济高效的多轴运动控制
使用PC并行端口到驱动器电路接口技术开发的,该技术消除了在PC内部安装昂贵的插入式运动控制板的要求。为所介绍的系统开发了PC到电机接口和驱动器电路板。该系统能够使用直流电机控制四轴运动或使用步进电机控制两轴运动。
运动控制是自动化的一个子领域,其中机器的位置和、速度使用某种类型的设备进行控制。运动控制是机器人和CNC机床的重要组成部分。在基于PC的运动控制系统中,PC执行所有实时运动控制操作,包括反馈回路和多轴协调。
系统的主要组件包括用于开发应用软件的PC,用于创建电机要遵循的轨迹的运动控制器,为直流电机输出±10V信号,或步进电机的步进和方向脉冲,驱动器(放大器)从控制器获取命令并产生驱动或转动电机所需的电流,一反馈装置用于获取电机位置并将结果报告给控制器,从而闭合运动控制器的回路。

系统使用LabVIEW软件和PC并行口到驱动电路接口技术实现,通过易于集成的LabVIEW软件以及测试和测量硬件提高了生产力并降低了成本。运动控制应用软件使用PC上的LabVIEW开发,并通过并行端口以及接口和驱动器电路(IDC)与直流/步进电机通信。

基于LabVIEW的多轴运动控制系统的主要组件如下:
基于视窗的电脑
并行端口接口
接口和驱动电路
电机
1.基于视窗的电脑
作为工作的用户界面,使用了基于Windows的PC。所有运动控制应用软件均使用PC上的LabVIEW开发,并通过并行端口以及接口和驱动器电路与电机通信。
2.并行端口接口
并行端口是计算机上用于连接各种外围设备的一种接口。在计算中,并行端口是并行通信物理接口。它也被称为打印机端口或LPT端口,通常以25针母连接器的形式出现在PC的背面。

对于基于并行端口的运动控制应用,8位数据通过并行端口接口电缆发送到运动控制接口硬件以控制电机。要将8位数据发送到指定的并行端口,需要端口地址和十六进制代码。
3.接口和驱动电路
接口和驱动电路板用于将运动控制电机连接和接口到PC。为了实现基于PC的多轴运动控制系统,设计并组装了IDC板。开发的IDC板能够使用其八条数字输出线驱动/控制四个直流电机或两个步进电机。
4.电机
运动控制是指根据速度、距离、负载、惯性或所有这些因素的组合来精确控制物体的运动。运动控制设计人员面前总是有两个选择,即使用“直流电机”还是“步进电机”。在速度、重量、尺寸、成本方面直流电机始终优于步进电机。当与控制器接口时,可以用直流电机做很多事情。例如,可以控制电机的速度,可以控制旋转方向,还可以对直流电机的旋转进行编码,即跟踪电机转了多少圈等。所以可以看到直流电机不亚于步进电机。另一方面,步进电机坚固耐用,结构简单,可靠性高,低速时扭矩大。对于系统的运动控制演示,使用了低速直流/步进电机。工作中使用的电机规格如下:
直流电机:10转/分,12V,150mA,齿轮
步进电机:0.9°步进,12V,200mA,4线
如图6所示,可以连接并驱动四个两线直流电机或两个4线步进电机。
系统软件
多轴运动控制系统的应用软件是使用图形化编程语言LabVIEW开发的。为4轴直流电机运动控制系统和2轴步进电机运动控制系统开发了独立的应用软件。所开发的运动控制软件的简要说明如下:
轴直流电机运动控制软件
对于四轴直流电机运动控制演示模型,为每个轴使用了10RPM、12V、150mA减速直流电机。为了以恒定速度控制这些电机的位置和方向,使用LabVIEW开发了应用软件。
使用开发的运动控制软件,可以配置运动控制轴以实现独立或同时运动。在应用软件的前面板中,轴和2处于活动状态(ON)以实现其同时运动,而轴3和轴4处于关闭状态。在开发的运动控制软件的所有前面板中,驱动电机的逻辑状态 “绿色”LED表示逻辑状态“I”(ON),而“红色”LED表示逻辑状态“0”(OFF)。在开发的运动控制系统中,轴位置可以控制在0°至360°的角度范围内,精度为±0.05°。

直流电机的速度也可以使用变速运动控制应用软件进行控制。
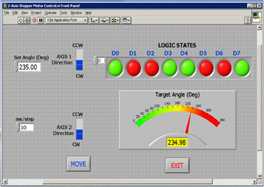
2轴步进电机运动控制软件
对于两轴步进电机运动控制演示模型,在每个轴上使用0.96°步进、12V、200mA、4线步进电机。
为了控制两轴步进电机运动控制系统的位置、方向和速度,开发了基于LabVIEW的应用软件。使用开发的应用软件,可以将运动控制轴配置为独立或同时运动。应用软件前面板中,轴1和轴2配置为同时和CW方向运动控制。步进电机各轴的运动方向可以使用轴方向开关独立设置为顺时针(CW)或逆时针(CCW)。对于使用步进电机开发的运动控制系统,可以在±0.05°的精度范围内控制0°至360°角范围内的每个轴位置。
这是LabVIEW的一个简单应用,更多的开发案例,欢迎登录北京瀚文网星官网,了解更多信息。