御2遥控器航测设置
- 0 前言
- 1 遥控器设置
- 2 航测软件设置
- 3 航测设置
0 前言
- 无人机:御2 或者御2 pro,非变焦版本
- 遥控器:大疆带屏控器 RM500

1 遥控器设置
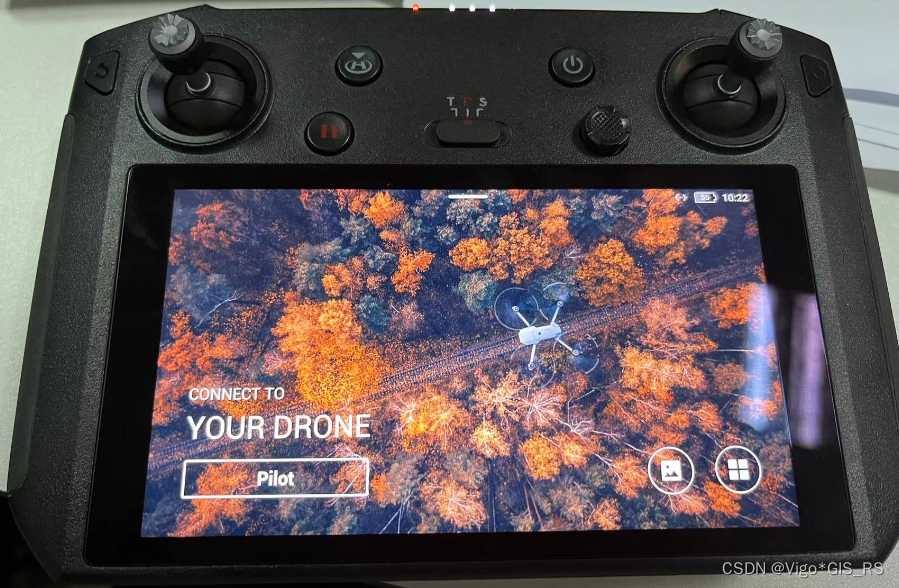
默认的遥控器控制软件CONNECT只能航拍,无法航测,必须调节为航测遥控器pilot
-
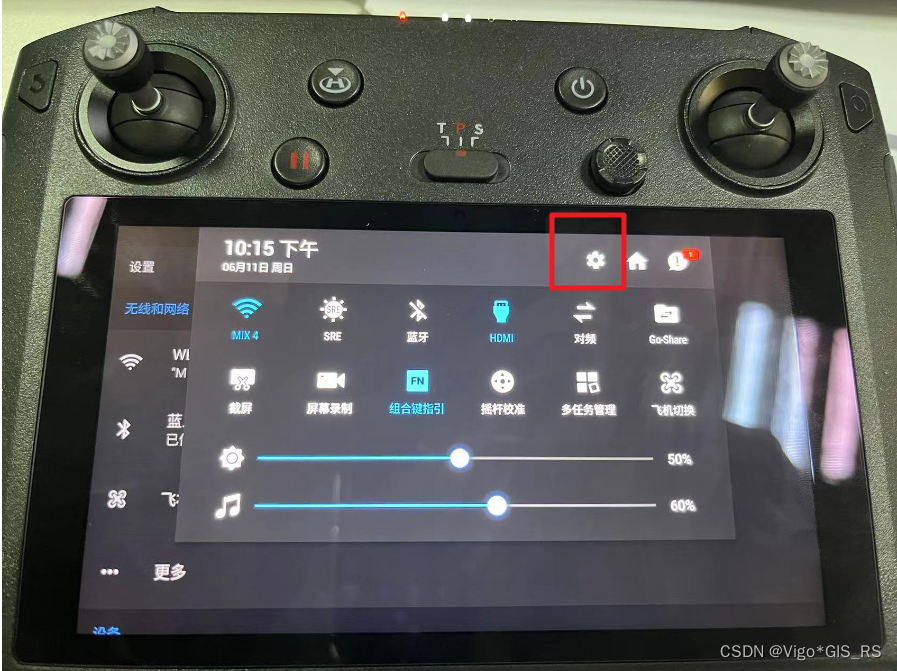
下滑屏幕,点击齿轮
-
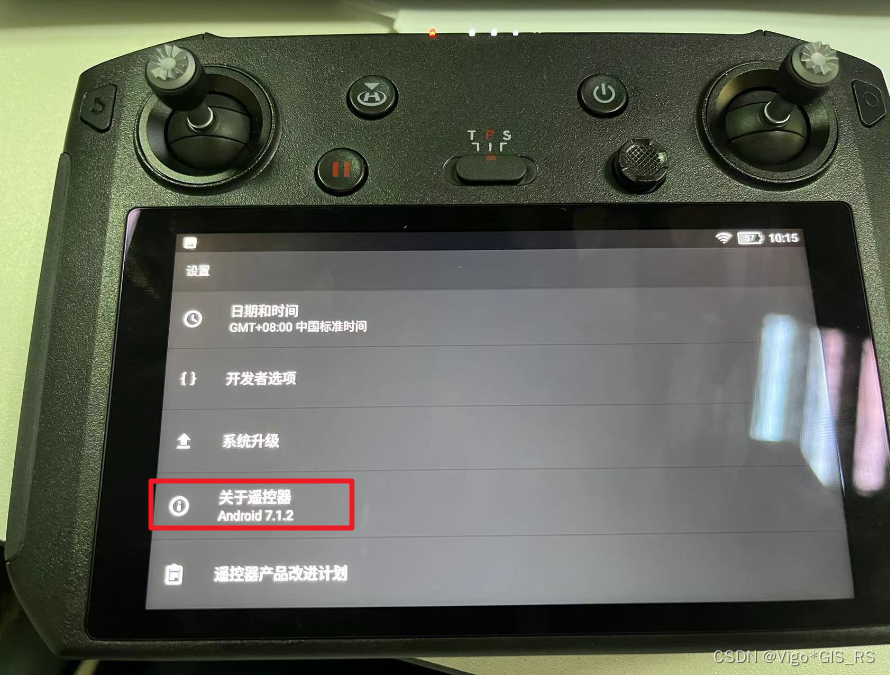
点击关于遥控器
-
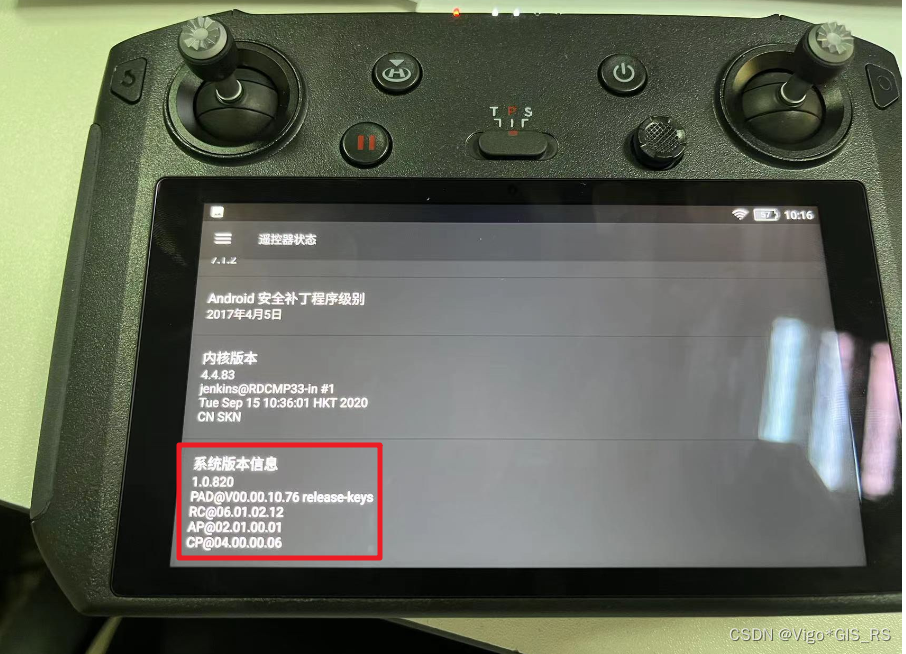
连续点击系统版本信息直至出现进入开发者模式提示
-
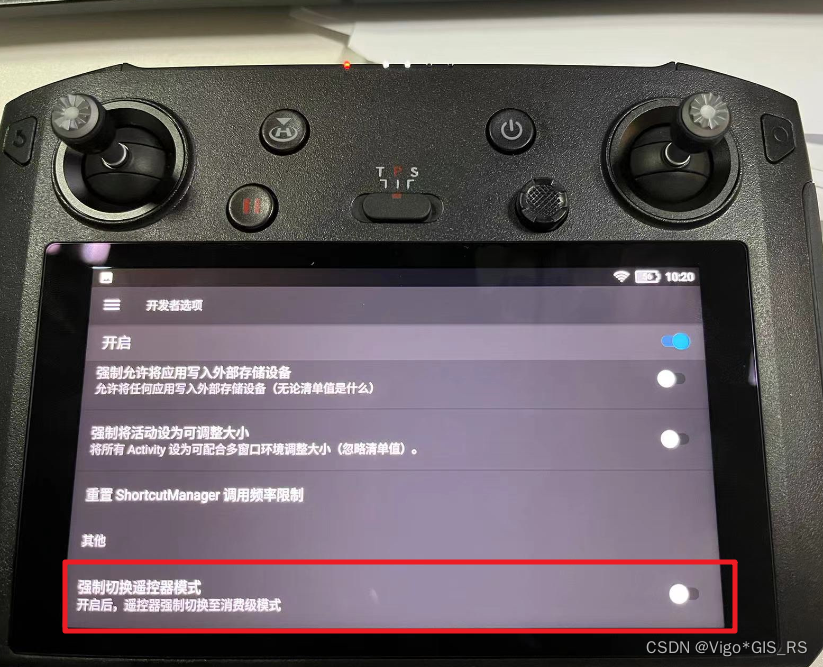
返回设置界面,点击
开发者选项,拉到最下面,点击强制切换遥控器模式
-
重启遥控器,发现已经变成了pilot遥控器模式
2 航测软件设置
-
可见已经连接到御2 pro了

-
点击右上角…,在通用设置里面选择高德地图。

-
新建Mavic2Pro(御2pro)相机参数
照片分辨率宽5472px高3648px
传感器尺寸宽13.2mm高8.8mm
焦距28mm
最小定时拍间隔2


3 航测设置
航测中最重要的几个参数都是相辅相成、互相影响的。
我们需要关注的核心参数是GS(Ground Resolution),有些地方也叫GSD,就是照片中一个像素宽度代表地面上的距离,这个跟航高和相机的CMOS分辨率有关,不细说。软件中会根据航高(飞行高度)告诉你GSD是多大。比如御2pro飞100m高,GSD是0.86cm左右。
其他的参数有重叠率、飞行速度、时间等,出门做外业,时间的把握很重要,航线规划的时候架次飞行时长和剩余电池电量时长最好相近。
在设置好航高、重叠率之后即可按下坐标的保存按钮,然后点击开始按钮即可开始飞行。如果一个架次无法完成作业,遥控器会自动保存航线细心,更换电池之后可以继续上次的航线任务。
不再啰嗦。谢谢阅读。