一 简介
UART 全称叫做串行接口,通常也叫做 COM 接口,串行接口指的是数据一个一个的顺序传输,通信线路简单。使用两条线即可实现双向通信,一条用于发送,一条用于接收。串口通信距离远,但是速度相对会低,串口是一种很常用的工业接口。I.MX6U 自带的 UART 外设就是 串口的一种,UART 全称是 Universal Asynchronous Receiver/Trasmitter,也就是异步串行收发器。 既然有异步串行收发器,那肯定也有同步串行收发器,除 了有 UART 外,还有 另外一 个叫做 USART 的东西 。USART 的 全称是 Universal Synchronous/Asynchronous Receiver/Transmitter,也就是同步/异步串行收发器。相比 UART 多了 一个同步的功能,在硬件上体现出来的就是多了一条时钟线。一般 USART 是可以作为 UART
6U UART
1 I.MX6U 一共 有 8 个 UART,其主要特性如下:
①、兼容 TIA/EIA-232F 标准,速度最高可到 5Mbit/S。
②、支持串行 IR 接口,兼容 IrDA,最高可到 115.2Kbit/s。
③、支持 9 位或者多节点模式(RS-485)。
④、1 或 2 位停止位。
⑤、可编程的奇偶校验(奇校验和偶校验)。
⑥、自动波特率检测(最高支持 115.2Kbit/S)。 I.MX6U 的 UART 功能很多,但是我们本章就只用到其最基本的串口功能,关于 UART 其 它功能的介绍请参考《I.MX6ULL 参考手册》第 3561 页的“Chapter 55 Universal Asynchronous Receiver/Transmitter(UART)”章节。
二 结构原理图
2.1 时钟源
参考IMX6ULL芯片手册《Chapter 18: Clock Controller Module (CCM)》,
根据IMX6ULL的时钟树,设置CSCDR1寄存器就可以给UART提供总时钟,如下图:

下图是CSCDR1(CCM Serial Clock Divider Register 1)的位说明,对于UART,我们选择时钟源位80M:
 CCM_SDCDR1->UART_CLK_SEL = 0, 1分频 ~3F
CCM_SDCDR1->UART_CLK_SEL = 0, 1分频 ~3F


见I.MX6ull 时钟系统
2.2 内部结构
UART 一般的接口电平有 TTL (TTL是 Time To Live的缩写,是生存时间值的意思) 和 RS-232,一般开发板上都有 TXD 和 RXD 这样的引脚, 这些引脚低电平表示逻辑 0,高电平表示逻辑 1,这个就是 TTL 电平。RS-232 采用差分线,-3~- 15V 表示逻辑 1,+3~+15V 表示逻辑 0。一般图 21.1.1.2 中的接口就是 TTL 电平

图 21.1.1.2 中的模块就是 USB 转 TTL模块,TTL 接口部分有 VCC、GND、RXD、TXD、
RTS 和 CTS。RTS 和 CTS 基本用不到,使用的时候通过杜邦线和其他模块的 TTL 接口相连即 可。 RS-232 电平需要 DB9 接口,I.MX6U-ALPHA 开发板上的 COM3(UART3)口就是 RS-232 接 口的,如图 21.1.1.3 所示:

由于现在的电脑都没有 DB9 接口了,取而代之的是 USB 接口,所以就催生出了很多 USB
转串口 TTL 芯片,比如 CH340、PL2303 等。通过这些芯片就可以实现串口 TTL 转 USB。I.MX6UALPHA 开发板就使用 CH340 芯片来完成 UART1 和电脑之间的连接,只需要一条USB 线即可, 对于 V2.4 版以前的底板,如图 21.1.1.4 所示。


2.3 工作原理
UART 作为串口的一种,其工作原理也是将数据一位一位的进行传输,发送和接收各用一 条线,因此通过 UART 接口与外界相连最少只需要三条线:TXD(发送)、RXD(接收)和 GND(地 线)。图 21.1.1.1 就是 UART 的通信格式:

2.3.1 各部分意义如下:
空闲位:数据线在空闲状态的时候为逻辑“1”状态,也就是高电平,表示没有数据线空闲, 没有数据传输。
起始位:当要传输数据的时候先传输一个逻辑“0”,也就是将数据线拉低,表示开始数据 传输。
数据位:数据位就是实际要传输的数据,数据位数可选择 5~8 位,我们一般都是按照字节 传输数据的,一个字节 8 位,因此数据位通常是 8 位的。低位在前,先传输,高位最后传输。
奇偶校验位:这是对数据中“1”的位数进行奇偶校验用的,可以不使用奇偶校验功能。
停止位:数据传输完成标志位,停止位的位数可以选择 1 位、1.5 位或 2 位高电平,一般都 选择 1 位停止位。
波特率:波特率就是 UART 数据传输的速率,也就是每秒传输的数据位数,一般选择 9600、
19200、115200 等。
2.3.2 串口模块内部结构

串口模块共有两个时钟输入 Peripheral Clock 和 Module Clock。
- Peripheral Clock
外部时钟。这个时钟主要用于读、写接收和发送的数据,例如读接收FIFO、写发送FIFO。 这个时钟与波特率设置无关,如果没有特殊需求我们将这个时钟保持默认即可,在初始代码中并没有特意设置这个时钟。
- Module Clock
模块时钟,它既可用于接收、发送数据也用于设置波特率,这个时钟决定了串口最高支持的波特率。Module Clock 时钟来自根时钟 UART_CLK_ROOT。
通过搜索可以找到UART1时钟使能的控制位。CCM_CCGR5 时钟树默认频率80M

2.4 重要寄存器

UARTx_UCR1 UARTx_UCR2 UARTx_UCR3 ,UARTx_USR2, CCM_CCGR5(main 函数一开始使能了所以外设时钟)
2.4.1 控制寄存器 UARTx_UCRx
1 UARTx_UCR1
- ADBR(bit14):自动波特率检测使能位,为 0 的时候关闭自动波特率检测,为 1 的时候使 能自动波特率检测。
- UARTEN(bit0):UART 使能位,为 0 的时候关闭 UART,为 1 的时候使能 UART。

2 UARTx_UCR2

- IRTS(bit14):为 0 的时候使用 RTS 引脚功能,为 1 的时候忽略 RTS 引脚。
- PREN(bit8):奇偶校验使能位,为 0 的时候关闭奇偶校验,为 1 的时候使能奇偶校验。 PROE(bit7):奇偶校验模式选择位,开启奇偶校验以后此位如果为 0 的话就使用偶校 验,此位为 1 的话就使能奇校验。
- STOP(bit6):停止位数量,为 0 的话 1 位停止位,为 1 的话 2 位停止位。
- WS(bit5):数据位长度,为 0 的时候选择 7 位数据位,为 1 的时候选择 8 位数据位。
- TXEN(bit2):发送使能位,为 0 的时候关闭 UART 的发送功能,为 1 的时候打开 UART
- 的发送功能。
- RXEN(bit1):接收使能位,为 0 的时候关闭 UART 的接收功能,为 1 的时候打开 UART
- 的接收功能。
- SRST(bit0):软件复位,为 0 的是时候软件复位 UART,为 1 的时候表示复位完成。复位 完成以后此位会自动置 1,表示复位完成。此位只能写 0,写 1 会被忽略掉。
3 UARTx_UCR3
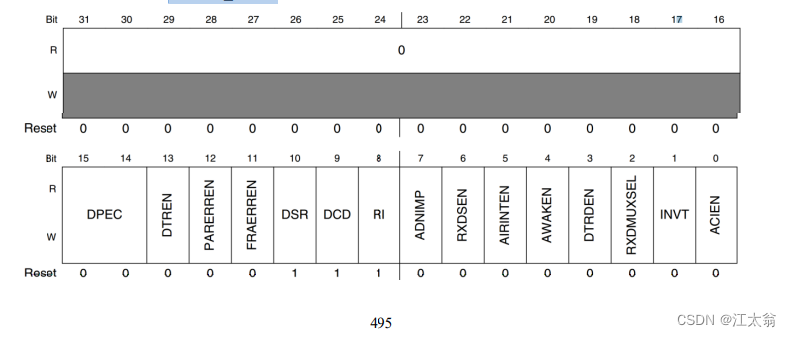
本章实验就用到了寄存器 UARTx_UCR3 中的位 RXDMUXSEL(bit2),这个位应该始终为 1, 这个在《I.MX6ULL 参考手册》第 3624 页有说明。
![]()
红外输入混合模式
2.4.2、状态寄存器 UARTx_USR2
- TXDC(bit3):发送完成标志位,为 1 的时候表明发送缓冲(TxFIFO)和移位寄存器为空,也 就是发送完成,向 TxFIFO 写入数据此位就会自动清零。 RDR(bit0):数据接收标志位,为 1 的时候表明至少接收到一个数据,从寄存器
- UARTx_URXD 读取数据接收到的数据以后此位会自动清零。

2.4.3 分频寄存器 UARTx_UFCR 、 UARTx_UBIR 和 UARTx_UBMR

UART 的波特率
通过这三个寄存器可以设置 UART 的波特率,波特率的计算公式如下:

Ref Freq:经过分频以后进入 UART 的最终时钟频率。 UBMR:寄存器 UARTx_UBMR 中的值。 UBIR:寄存器 UARTx_UBIR 中的值。 通过 UARTx_UFCR 的 RFDIV 位、UARTx_UBMR 和 UARTx_UBIR 这三者的配合即可得 到我们想要的波特率。比如现在要设置 UART 波特率为 115200,那么可以设置 RFDIV 为
5(0b101),也就是 1 分频,因此 Ref Freq=80MHz。设置 UBIR=71,UBMR=3124,根据上面的 公式可以得到:

实际使用时直接调用对应方法即可不必过于关心推导过程
2.4.4 UARTx_URXD , UARTx_UTXD
最后来看一下寄存器 UARTx_URXD 和 UARTx_UTXD,这两个寄存器分别为 UART 的接 收和发送数据寄存器,这两个寄存器的低八位为接收到的和要发送的数据。读取寄存器
UARTx_URXD 即可获取到接收到的数据,如果要通过 UART 发送数据,直接将数据写入到寄 存器 UARTx_UTXD 即可。
三 使用实验
通过 UART1读写并显示输出
3.1 配置步骤
-
UART1 的配置步骤如下:
-
1、设置 UART1 的时钟源
设置 UART 的时钟源为 pll3_80m,设置寄存器 CCM_CSCDR1 的 UART_CLK_SEL 位为 0
即可。
-
2、初始化 UART1
初始化 UART1 所使用 IO,设置 UART1 的寄存器 UART1_UCR1~UART1_UCR
-
3,设置内 容包括波特率,奇偶校验、停止位、数据位等等。
-
4、使能 UART1
UART1 初始化完成以后就可以使能 UART1 了,设置寄存器 UART1_UCR1 的位 UARTEN
为 1。
5、编写 UART1 数据收发函数
编写两个函数用于 UART1 的数据收发操作。
3.2 代码
bsp_uart.h
#ifndef _BSP_UART_H
#define _BSP_UART_H
#include "imx6ul.h"
/***************************************************************
Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
文件名 : bsp_led.c
作者 : 左忠凯
版本 : V1.0
描述 : 串口驱动文件头文件。
其他 : 无
论坛 : www.wtmembed.com
日志 : 初版V1.0 2019/1/15 左忠凯创建
***************************************************************/
/* 函数声明 */
void uart_init(void);
void uart_io_init(void);
void uart_disable(UART_Type *base);
void uart_enable(UART_Type *base);
void uart_softreset(UART_Type *base);
void uart_setbaudrate(UART_Type *base, unsigned int baudrate, unsigned int srcclock_hz);
void putc(unsigned char c);
void puts(char *str);
unsigned char getc(void);
void raise(int sig_nr);
#endif
bsp_uart.c
/***************************************************************
Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
文件名 : bsp_led.c
作者 : 左忠凯
版本 : V1.0
描述 : 串口驱动文件。
其他 : 无
论坛 : www.wtmembed.com
日志 : 初版V1.0 2019/1/15 左忠凯创建
***************************************************************/
#include "bsp_uart.h"
/*
* @description : 初始化串口1,波特率为115200
* @param : 无
* @return : 无
*/
void uart_init(void)
{
/* 1、初始化串口IO */
uart_io_init();
/* 2、初始化UART1 */
uart_disable(UART1); /* 先关闭UART1 */
uart_softreset(UART1); /* 软件复位UART1 */
UART1->
UCR1 = 0; /* 先清除UCR1寄存器 */
/*
* 设置UART的UCR1寄存器,关闭自动波特率
* bit14: 0 关闭自动波特率检测,我们自己设置波特率
*/
UART1->UCR1 &= ~(1<<14);
/*
* 设置UART的UCR2寄存器,设置内容包括字长,停止位,校验模式,关闭RTS硬件流控
* bit14: 1 忽略RTS引脚
* bit8: 0 关闭奇偶校验
* bit6: 0 1位停止位
* bit5: 1 8位数据位
* bit2: 1 打开发送
* bit1: 1 打开接收
*/
UART1->UCR2 |= (1<<14) | (1<<5) | (1<<2) | (1<<1);
/*
* UART1的UCR3寄存器
* bit2: 1 必须设置为1!参考IMX6ULL参考手册3624页
*/
UART1->UCR3 |= 1<<2;
/*
* 设置波特率
* 波特率计算公式:Baud Rate = Ref Freq / (16 * (UBMR + 1)/(UBIR+1))
* 如果要设置波特率为115200,那么可以使用如下参数:
* Ref Freq = 80M 也就是寄存器UFCR的bit9:7=101, 表示1分频
* UBMR = 3124
* UBIR = 71
* 因此波特率= 80000000/(16 * (3124+1)/(71+1))=80000000/(16 * 3125/72) = (80000000*72) / (16*3125) = 115200
*/
UART1->UFCR = 5<<7; //ref freq等于ipg_clk/1=80Mhz
UART1->UBIR = 71;
UART1->UBMR = 3124;
#if 0
uart_setbaudrate(UART1, 115200, 80000000); /* 设置波特率 */
#endif
/* 使能串口 */
uart_enable(UART1);
}
/*
* @description : 初始化串口1所使用的IO引脚
* @param : 无
* @return : 无
*/
void uart_io_init(void)
{
/* 1、初始化IO复用
* UART1_RXD -> UART1_TX_DATA
* UART1_TXD -> UART1_RX_DATA
*/
IOMUXC_SetPinMux(IOMUXC_UART1_TX_DATA_UART1_TX,0); /* 复用为UART1_TX */
IOMUXC_SetPinMux(IOMUXC_UART1_RX_DATA_UART1_RX,0); /* 复用为UART1_RX */
/* 2、配置UART1_TX_DATA、UART1_RX_DATA的IO属性
*bit 16:0 HYS关闭
*bit [15:14]: 00 默认100K下拉
*bit [13]: 0 keeper功能
*bit [12]: 1 pull/keeper使能
*bit [11]: 0 关闭开路输出
*bit [7:6]: 10 速度100Mhz
*bit [5:3]: 110 驱动能力R0/6
*bit [0]: 0 低转换率
*/
IOMUXC_SetPinConfig(IOMUXC_UART1_TX_DATA_UART1_TX,0x10B0);
IOMUXC_SetPinConfig(IOMUXC_UART1_RX_DATA_UART1_RX,0x10B0);
}
/*
* @description : 波特率计算公式,
* 可以用此函数计算出指定串口对应的UFCR,
* UBIR和UBMR这三个寄存器的值
* @param - base : 要计算的串口。
* @param - baudrate : 要使用的波特率。
* @param - srcclock_hz :串口时钟源频率,单位Hz
* @return : 无
*/
void uart_setbaudrate(UART_Type *base, unsigned int baudrate, unsigned int srcclock_hz)
{
uint32_t numerator = 0u; //分子
uint32_t denominator = 0U; //分母
uint32_t divisor = 0U;
uint32_t refFreqDiv = 0U;
uint32_t divider = 1U;
uint64_t baudDiff = 0U;
uint64_t tempNumerator = 0U;
uint32_t tempDenominator = 0u;
/* get the approximately maximum divisor */
numerator = srcclock_hz;
denominator = baudrate << 4;
divisor = 1;
while (denominator != 0)
{
divisor = denominator;
denominator = numerator % denominator;
numerator = divisor;
}
numerator = srcclock_hz / divisor;
denominator = (baudrate << 4) / divisor;
/* numerator ranges from 1 ~ 7 * 64k */
/* denominator ranges from 1 ~ 64k */
if ((numerator > (UART_UBIR_INC_MASK * 7)) || (denominator > UART_UBIR_INC_MASK))
{
uint32_t m = (numerator - 1) / (UART_UBIR_INC_MASK * 7) + 1;
uint32_t n = (denominator - 1) / UART_UBIR_INC_MASK + 1;
uint32_t max = m > n ? m : n;
numerator /= max;
denominator /= max;
if (0 == numerator)
{
numerator = 1;
}
if (0 == denominator)
{
denominator = 1;
}
}
divider = (numerator - 1) / UART_UBIR_INC_MASK + 1;
switch (divider)
{
case 1:
refFreqDiv = 0x05;
break;
case 2:
refFreqDiv = 0x04;
break;
case 3:
refFreqDiv = 0x03;
break;
case 4:
refFreqDiv = 0x02;
break;
case 5:
refFreqDiv = 0x01;
break;
case 6:
refFreqDiv = 0x00;
break;
case 7:
refFreqDiv = 0x06;
break;
default:
refFreqDiv = 0x05;
break;
}
/* Compare the difference between baudRate_Bps and calculated baud rate.
* Baud Rate = Ref Freq / (16 * (UBMR + 1)/(UBIR+1)).
* baudDiff = (srcClock_Hz/divider)/( 16 * ((numerator / divider)/ denominator).
*/
tempNumerator = srcclock_hz;
tempDenominator = (numerator << 4);
divisor = 1;
/* get the approximately maximum divisor */
while (tempDenominator != 0)
{
divisor = tempDenominator;
tempDenominator = tempNumerator % tempDenominator;
tempNumerator = divisor;
}
tempNumerator = srcclock_hz / divisor;
tempDenominator = (numerator << 4) / divisor;
baudDiff = (tempNumerator * denominator) / tempDenominator;
baudDiff = (baudDiff >= baudrate) ? (baudDiff - baudrate) : (baudrate - baudDiff);
if (baudDiff < (baudrate / 100) * 3)
{
base->UFCR &= ~UART_UFCR_RFDIV_MASK;
base->UFCR |= UART_UFCR_RFDIV(refFreqDiv);
base->UBIR = UART_UBIR_INC(denominator - 1); //要先写UBIR寄存器,然后在写UBMR寄存器,3592页
base->UBMR = UART_UBMR_MOD(numerator / divider - 1);
}
}
/*
* @description : 关闭指定的UART
* @param - base: 要关闭的UART
* @return : 无
*/
void uart_disable(UART_Type *base)
{
base->UCR1 &= ~(1<<0);
}
/*
* @description : 打开指定的UART
* @param - base: 要打开的UART
* @return : 无
*/
void uart_enable(UART_Type *base)
{
base->UCR1 |= (1<<0);
}
/*
* @description : 复位指定的UART
* @param - base: 要复位的UART
* @return : 无
*/
void uart_softreset(UART_Type *base)
{
base->UCR2 &= ~(1<<0); /* UCR2的bit0为0,复位UART */
while((base->UCR2 & 0x1) == 0); /* 等待复位完成 */
}
/*
* @description : 发送一个字符
* @param - c : 要发送的字符
* @return : 无
*/
void putc(unsigned char c)
{
while(((UART1->USR2 >> 3) &0X01) == 0);/* 等待上一次发送完成 */
UART1->UTXD = c & 0XFF; /* 发送数据 */
}
/*
* @description : 发送一个字符串
* @param - str : 要发送的字符串
* @return : 无
*/
void puts(char *str)
{
char *p = str;
while(*p)
putc(*p++);
}
/*
* @description : 接收一个字符
* @param : 无
* @return : 接收到的字符
*/
unsigned char getc(void)
{
while((UART1->USR2 & 0x1) == 0);/* 等待接收完成 */
return UART1->URXD; /* 返回接收到的数据 */
}
/*
* @description : 防止编译器报错
* @param : 无
* @return : 无
*/
void raise(int sig_nr)
{
}
main.c
#include "bsp_clk.h"
#include "bsp_delay.h"
#include "bsp_led.h"
#include "bsp_beep.h"
#include "bsp_key.h"
#include "bsp_int.h"
#include "bsp_uart.h"
/*
* @description : main函数
* @param : 无
* @return : 无
*/
int main(void)
{
unsigned char a=0;
unsigned char state = OFF;
int_init(); /* 初始化中断(一定要最先调用!) */
imx6u_clkinit(); /* 初始化系统时钟 */
delay_init(); /* 初始化延时 */
clk_enable(); /* 使能所有的时钟 */
led_init(); /* 初始化led */
beep_init(); /* 初始化beep */
uart_init(); /* 初始化串口,波特率115200 */
while(1)
{
puts("请输入1个字符:");
a=getc();
putc(a); //回显功能
puts("\r\n");
//显示输入的字符
puts("您输入的字符为:");
putc(a);
puts("\r\n\r\n");
state = !state;
led_switch(LED0,state);
}
return 0;
}