1)实验平台:正点原子MPSoC开发板
2)平台购买地址:https://detail.tmall.com/item.htm?id=692450874670
3)全套实验源码+手册+视频下载地址: http://www.openedv.com/thread-340252-1-1.html
第二十七章 MDIO接口读写测试实验
在以太网通信中,设备之间的物理层链路均由PHY芯片(物理层芯片,本文指YT8521)建立。PHY芯片有一个配置接口,即MDIO接口,可以配置PHY芯片的工作模式以及获取PHY芯片的若干状态信息。本章我们来学习如何通过DFZU2EG/4EV MPSoC开发板实现对PHY芯片的MDIO接口进行读写测试。
本章分为以下几个章节:
212727.1简介
27.2实验任务
27.3硬件设计
27.4程序设计
27.5下载验证
27.1简介
以太网概述
以太网(Ethernet)是当今现有局域网采用的最通用的通信协议标准,该标准定义了在局域网中采用的电缆类型和信号处理方法。以太网凭借其成本低、通信速率高、抗干扰性强等优点被广泛应用在网络远程监控、交换机、工业自动化等对通信速率要求较高的场合。
以太网是一种产生较早,使用相当广泛的局域网。其最初是由Xerox(施乐)公司创建并由Xerox、Intel和DEC公司联合开发的基带局域网规范,后来被电气与电子工程师协会(IEEE)所采纳作为802.3的标准。
以太网的分类有标准以太网(10Mbit/s),快速以太网(100Mbit/s)和千兆以太网(1000Mbit/s)。随着以太网技术的飞速发展,市场上也出现了万兆以太网(10Gbit/s),它扩展了IEEE802.3协议和MAC规范,使其技术支持10Gbit/s的传输速率。在实际应用中,千兆以太网理论上最高通信速率为1000Mbit/s,可以胜任大部分的使用场景。
以太网通信离不开连接端口的支持,网络数据连接的端口就是以太网接口。以太网接口类型有RJ45接口,RJ11接口(电话线接口),SC光纤接口等。其中RJ45接口是我们现在最常见的网络设备接口(如:电脑网口),我们开发板使用的就是这种接口。
RJ45接口俗称“水晶头”,专业术语为RJ45连接器,由插头(接头、水晶头)和插座(母座)组成,属于双绞线以太网接口类型。RJ45插头只能沿固定方向插入,设有一个塑料弹片与RJ45插槽卡住以防止脱落。
RJ45接口样式如图 27.1.1所示:

图 27.1.1 RJ45插头(左)、插座(右)
RJ45接口定义以及各引脚功能在不同通信速率下的定义有区别,图 27.1.2是在10M/100M通信速率下的定义,由下图可知,RJ45插座只使用了1、2、3、6这四根线,其中1、2这组负责传输数据(TX+、TX-),而3、6这组负责接收数据(RX+、RX-),另外四根线是备用的。
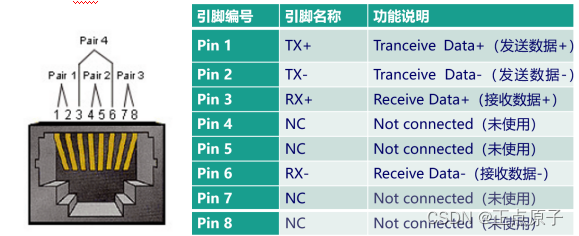
图 27.1.2 RJ45插座10M/100M接口定义
而在1000M的通信速率下,RJ45插座的8根线都有用到,且都是双向引脚。需要说明的是,支持千兆网通信的RJ45接口是向下兼容的,即也支持10M/100M通信速率,只不过不同的通信速率,其引脚功能有区别。千兆网各引脚功能如下图所示:

图 27.1.3 RJ45插座1000M接口定义
从硬件的角度来说,以太网接口电路主要由MAC(Media Access Control)控制器和物理层接口PHY(Physical Layer,PHY)两大部分构成。MAC指媒体访问控制子层协议,它和PHY接口既可以整合到单颗芯片内,也可以独立分开,对于本次设计来说,MAC控制器由FPGA实现,PHY芯片指开发板板载的以太网芯片。
PHY在发送数据的时候,接收MAC发过来的数据(对PHY来说,没有帧的概念,都是数据而不管什么地址,数据还是CRC),把并行数据转化为串行流数据,按照物理层的编码规则把数据编码转换为模拟信号发送出去,接收数据时的流程反之。PHY还提供了和对端设备连接的重要功能,并通过LED灯显示出自己目前的连接状态和工作状态。当我们给网卡接入网线的时候,PHY芯片不断发出脉冲信号来检测对端是否有设备,它们通过标准的“语言”交流,互相协商并确定连接速度、双工模式、是否采用流控等。通常情况下,协商的结果是两个设备中能同时支持的最大速度和最好的双工模式。这个技术被称为Auto Negotiation,即自协商。
MDIO接口
MAC和PHY芯片有一个配置接口,即MDIO接口,可以配置PHY芯片的工作模式以及获取PHY芯片的若干状态信息。PHY芯片内部包含一系列寄存器,用户通过这些寄存器来配置PHY芯片的工作模式以及获取PHY芯片的若干状态信息,如连接速率、双工模式、自协商状态等。FPGA通过MDIO接口对PHY芯片内部的寄存器进行配置。通常情况下,PHY芯片在默认状态下也可以正常工作,在做以太网通信实验时,对MDIO接口的配置不是必须的,本章旨在向大家介绍MDIO接口以及如何对MDIO接口进行读写操作。MAC和PHY连接示意图如下图所示。

图 27.1.4 MDIO接口示意图
MDIO接口也称为SMI接口(Serial Management Interface,串行管理接口),包括ETH_MDC(数据管理时钟)和ETH_MDIO(数据管理输入输出)两条信号线。ETH_MDC为ETH_MDIO提供时钟,ETH_MDC的最大时钟不能超过12.5Mhz。ETH_MDIO为双向数据引脚,既用于发送数据,也用于接收数据。
MDIO接口的读写通信协议如下图所示:

图 27.1.5 MDIO接口通信协议
Preamble:32位前导码,由MAC端发送32位逻辑“1”,用于同步PHY芯片。
ST(Start of Frame):2位帧开始信号,用01表示。
OP(Operation Code):2位操作码,读:10写:01。
PHYAD(PHY Address):5位PHY地址,用于表示与哪个PHY芯片通信,因此一个MAC上可以连接多个PHY芯片。
REGAD(Register Address):5位寄存器地址,可以表示共32位寄存器。
TA(Turnaround):2位转向,在读命令中,MDIO在此时由MAC驱动改为PHY驱动,在第一个TA位,MDIO引脚为高阻状态,第二个TA位,PHY将MDIO引脚拉低,准备发送数据;在写命令中,不需要MDIO方向发生变化,MAC固定输出2’b10,随后开始写入数据。
DATA:16位数据,在读命令中,PHY芯片将读到的对应PHYAD的REGAD寄存器的数据写到DATA中;在写命令中,PHY芯片将接收到的DATA写入REGAD寄存器中。需要注意的是,在DATA传输的过程中,高位在前,低位在后。
IDLE:空闲状态,此时MDIO为无源驱动,处于高阻状态,但一般用上拉电阻使其上拉至高电平。
MDIO接口读时序图如下图所示:
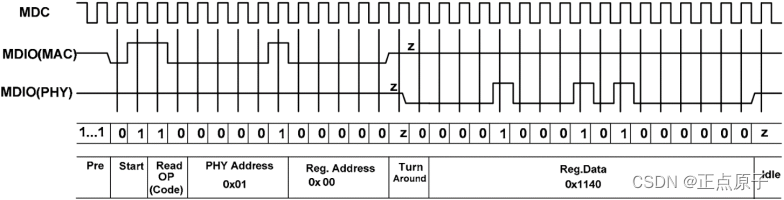
图 27.1.6 MDIO接口读时序图
上图是以PHY地址为0x01,从寄存器地址0x00读出数据为例。整个读操作过程的MDC时钟由MAC驱动,同时MAC驱动MDIO引脚输出前导码+帧开始+操作码+PHY地址+寄存器地址,随后MDIO引脚切换至PHY驱动。在第一个TA位,MDIO引脚为高阻状态,第二个TA位为低电平,表示PHY芯片成功响应,并且接下来会输出16位寄存器数据;而如果第二个TA位处于高电平,则PHY芯片响应失败,有可能PHY地址不正确或者其它时序的错误。
需要注意的是,PHY在MDC时钟的上升沿采集数据,为保证数据的稳定传输,MAC在MDC的下降沿更新MDIO引脚的数据。当MDIO引脚切换至PHY驱动时,MDIO数据在MDC时钟的下降沿更新,因此MAC在MDC时钟的上升沿采集数据。在读操作结束后,MAC将MDIO引脚输出高阻,此时MDIO引脚的外部上拉电阻会将MDIO引脚拉高,此时MDIO接口处于空闲状态。
MDIO接口写时序图如下图所示:

图 27.1.7 MDIO接口写时序图
上图是以PHY地址为0x01,向寄存器地址0x00写入0x1340为例,在整个写操作过程中,MDC时钟和MDIO引脚一直由MAC端驱动,按照MDIO接口写通信协议开始传输数据。需要注意的是,PHY在MDC时钟的上升沿采集数据,为保证数据的稳定传输,MAC在MDC的下降沿将数据更新至MDIO引脚。在写操作结束后,MAC将MDIO引脚输出高阻,此时MDIO引脚的外部上拉电阻会将MDIO引脚拉高,此时MDIO接口处于空闲状态。
以太网PHY芯片(YT8521)
1)PHY地址
YT8521芯片的PHY地址由PHYAD[2:0]生成,如下图所示:由芯片手册的引脚分配表可知PHYAD[2:0]三位引脚从低位到高位分别对应LED0和RX_CLK、RX_CTL,我们可以通过硬件电路设置LED0和RX_CLK、RX_CTL引脚为上拉或者下拉,即分配为高低电平,0或1,从而表示不同的地址。

图 27.1.8 YT8521芯片引脚分配表
LED0和RX_CLK、RX_CTL取不同的值表示的地址范围从001到111。开发板上的以太网PHY芯片RX_CTL接上拉电阻,LED0和RX_CLK接下拉电阻,因此PHY地址为3’b100。
2)复位
YT8521芯片复位后,PHY内部寄存器的数据会恢复默认的状态,并且重新开始和MAC进行自协商。YT8521支持两种复位方式,一种是硬件复位,另外一种是软件复位。硬件复位时通过ETH_RST_N引脚实现对PHY芯片的复位,当ETH_RST_N引脚持续10ms的低电平时,即可实现对PHY芯片的复位。软件复位通过向寄存器地址0x00的Bit[15]写入1进行复位,并且在完成复位后,该位会自动清零。
3)寄存器
YT8521共有22位寄存器,这里我们仅介绍本实验用到的三个寄存器,控制寄存器、状态寄存器以及PHY芯片具体状态寄存器。
控制寄存器(Basic Mode Control Register, Address 0x00),简写为:BMCR,用于芯片的复位和其它功能的控制,各个位的说明如下图所示:

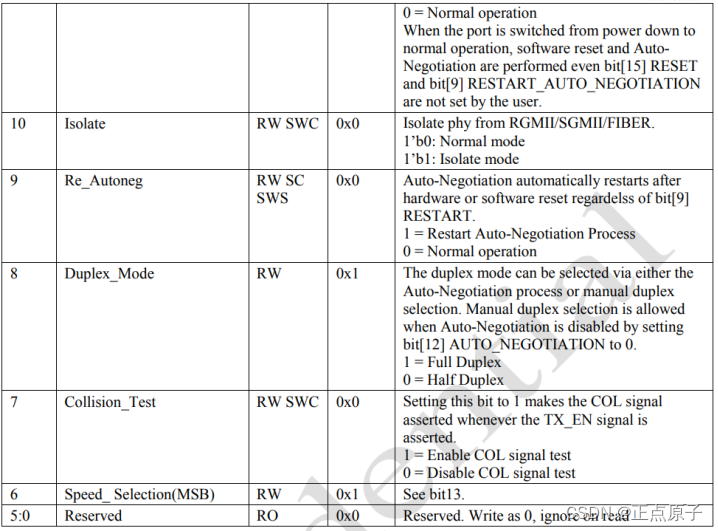
图 27.1.9 控制寄存器说明
部分常用位的说明如下:
Bit[15]:软件复位,1:PHY复位 0:正常模式;
Bit[14]:内部环回模式,1:内部环回模式 0:正常模式;
Bit[6] Bit[13]:选择网速带宽只有在自动协商使能不开启的情况下有效,10:1000Mb/s 01:100Mb/s 00:10Mb/s;
Bit[12]:自动协商使能,1:自动协商使能 0:禁止自动协商;
Bit[9]:重启自协商,1:重新开始自协商 0:自协商重启完成。
基本状态寄存器(Basic Mode Status Register, Address 0x01),简写为:BMSR,各个位的说明如下图所示:

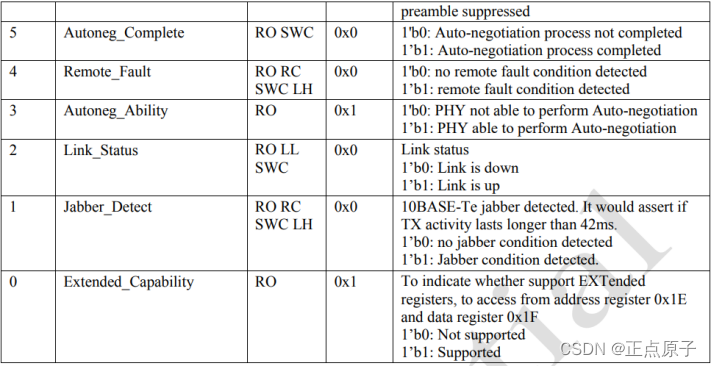
图 27.1.10 状态寄存器说明
对我们用位的说明如下:
Bit[5]:自协商完成 1:自协商完成 0:正在进行自协商;
Bit[2]:连接状态, 1:连接成功 0:连接失败。
PHY特定状态寄存器(PHY Specific Status Register ,Address 0x11),简写为:PHYSR,各个位的说明如下图所示:


图 27.1.11 特定状态寄存器
Bit[15:14]:连接速度
11:保留
10:1000Mbps
01:100Mbps
00:10Mbps
27.2实验任务
本节实验任务是使用DFZU2EG/4EV MPSoC开发板上的以太网接口,完成MDIO接口的读写测试实验。板载的PL按键(PL_KEY1)控制MDIO接口进行软复位,并通过两个LED灯实时指示当前网口的连接速度。
27.3硬件设计
DFZU2EG/4EV MPSoC开发板上有两个千兆网口,一个是PL端网口,另一个是PS端网口,本次实验使用PL端网络进行试验。RJ45接口用于连接网线,其原理图如下图所示。

图 27.3.1 RJ45接口原理图
上图中的PHY2_LED1和PHY2_LED2是PHY输出的LED信号,用于控制RJ45接口上的LED灯, PHY2_MDI0_P/N~ PHY2_MDI3_P/N是PHY和RJ45接口间的差分信号线,用于传输数据。
以太网的数据传输离不开以太网PHY(物理层)芯片的支持,物理层定义了数据发送与接收所需要的电信号、线路状态、时钟基准、数据编码和电路等,并向数据链路层设备提供标准接口。我们的DFZU2EG/4EV MPSoC开发板上使用的PHY芯片为裕太车通公司的YT8521,其原理图如下图所示:
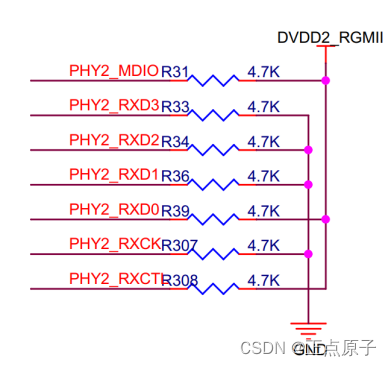
图 27.3.2 以太网接口原理图
YT8521是一个千兆以太网物理层收发器,支持1000/100/10Mbps通信速率,该芯片内部的参数可以通过MDIO接口进行配置。由上图可知,开发板上的以太网PHY芯片PHYAD2接上拉电阻,PHYAD [1:0] 接下拉电阻,因此PHY地址为5’h04。
原理图中的MDIO引脚连接了上拉电阻,在空闲状态下,当FPAG控制ETH_MDIO引脚输出高阻状态时,ETH_MDIO会被上拉至高电平。
本章主要完成MDIO接口的读写测试功能,因此以太网的引脚只用到了PHY2_MDC和PHY2_MDIO引脚。本实验中,各端口信号的管脚分配如下表所示:
表 27.3.1 MDIO接口读写测试实验管脚分配

对应的XDC约束语句如下所示:
#时钟周期约束
create_clock -name sys_clk_p -period 10.000 [get_ports sys_clk_p]
#IO管脚约束
set_property IOSTANDARD DIFF_HSTL_I_12 [get_ports sys_clk_p]
set_property IOSTANDARD DIFF_HSTL_I_12 [get_ports sys_clk_n]
set_property PACKAGE_PIN AE5 [get_ports sys_clk_p]
set_property PACKAGE_PIN AF5 [get_ports sys_clk_n]
set_property -dict {PACKAGE_PIN AH11 IOSTANDARD LVCMOS33} [get_ports sys_rst_n]
set_property -dict {PACKAGE_PIN E7 IOSTANDARD LVCMOS18} [get_ports eth_mdc]
set_property -dict {PACKAGE_PIN C7 IOSTANDARD LVCMOS18} [get_ports eth_mdio]
set_property -dict {PACKAGE_PIN AD11 IOSTANDARD LVCMOS33} [get_ports key]
set_property -dict {PACKAGE_PIN AE10 IOSTANDARD LVCMOS33} [get_ports {led[0]}]
set_property -dict {PACKAGE_PIN AF10 IOSTANDARD LVCMOS33} [get_ports {led[1]}]
27.4程序设计
根据实验任务,我们可以大致规划出系统的控制流程:首先每隔一段时间通过MDIO接口从PHY内部寄存器中读取基本状态寄存器(BMSR)和特定状态寄存器(PHYSR)的值,从而获取到自协商完成状态、连接状态和连接速度,将网口的连接速度通过LED灯进行指示;当FPGA检测到PL Key1按键按下时,开始通过MDIO接口对PHY进行软复位,在软复位完成后,PHY会重新开始自协商,此时LED灯仍然会每隔一段时间获取当前网口的连接状态以及连接速度。由此画出系统的功能框图如下图所示:

图 27.4.1 MDIO接口读写测试系统框图
MDIO接口驱动模块实现了对MDIO接口的读写驱动。MDIO接口控制模块根据输入的PL Key1按键,实现了对MDIO接口驱动模块的写操作,并每隔一段时间对MDIO接口驱动模块进行读操作,将获取到的网口连接状态与速度通过LED灯进行指示。
各模块端口及信号连接如下图所示:
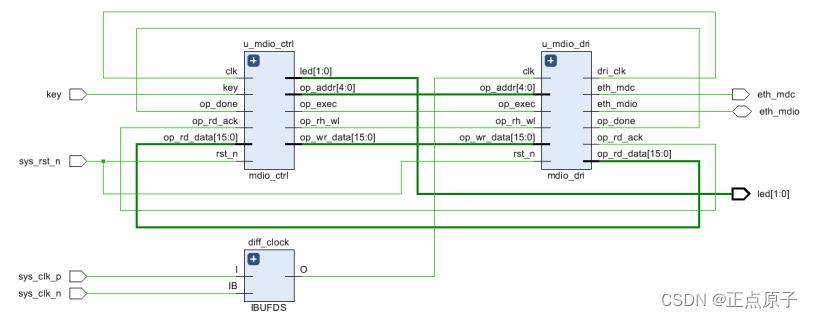
图 27.4.2 顶层模块原理图
由上图可知,FPGA顶层模块例化了以下两个模块,MDIO接口控制模块(mdio_ctrl)和MDIO接口驱动模块(mdio_dri),实现了各模块之间的数据交互。其中MDIO接口驱动模块预留了用户接口,方便对MDIO接口进行读写操作。
当FPGA通过MDIO控制模块向MDIO驱动模式读写数据时,拉高触发控制信号op_exec来触发MDIO驱动模块,op_rh_wl用于表示读或者写操作,当op_rh_wl为低电平时,MDIO驱动模块执行写操作,当op_rh_wl为高电平时,MDIO驱动模块执行读操作。op_addr表示读写寄存器地址,op_wr_data信号表示写入的数据,op_rd_data信号表示从MDIO接口的寄存器中读到的数据。当读或者写操作完成时,MDIO驱动模块会产生一个时钟周期的op_done信号,表示MDIO驱动模块读或者写操作完成。
顶层模块的代码如下:
1 module mdio_rw_test(
2 input sys_clk_p,
3 input sys_clk_n,
4 input sys_rst_n,
5 //MDIO接口
6 output eth_mdc , //PHY管理接口的时钟信号
7 inout eth_mdio , //PHY管理接口的双向数据信号
8 input key , // PL Key1按键
9 output [1:0] led //LED连接速率指示
10 );
11
12 //转换差分信号
13 IBUFDS diff_clock
14 (
15 .I (sys_clk_p), //系统差分输入时钟
16 .IB(sys_clk_n), //系统差分输入时钟
17 .O (sys_clk) //输出系统时钟
18 );
19
20 //wire define
21 wire op_exec ; //触发开始信号
22 wire op_rh_wl ; //低电平写,高电平读
23 wire [4:0] op_addr ; //寄存器地址
24 wire [15:0] op_wr_data ; //写入寄存器的数据
25 wire op_done ; //读写完成
26 wire [15:0] op_rd_data ; //读出的数据
27 wire op_rd_ack ; //读应答信号 0:应答 1:未应答
28 wire dri_clk ; //驱动时钟
29
30 //MDIO接口驱动
31 mdio_dri #(
32 .PHY_ADDR (5'h04), //PHY地址 3'b100
33 .CLK_DIV (6'd16) //分频系数
34 )
35 u_mdio_dri(
36 .clk (sys_clk ),
37 .rst_n (sys_rst_n ),
38 .op_exec (op_exec ),
39 .op_rh_wl (op_rh_wl ),
40 .op_addr (op_addr ),
41 .op_wr_data (op_wr_data),
42 .op_done (op_done ),
43 .op_rd_data (op_rd_data),
44 .op_rd_ack (op_rd_ack ),
45 .dri_clk (dri_clk ),
46
47 .eth_mdc (eth_mdc ),
48 .eth_mdio (eth_mdio )
49 );
50
51 //MDIO接口读写控制
52 mdio_ctrl u_mdio_ctrl(
53 .clk (dri_clk),
54 .rst_n (sys_rst_n ),
55 .key (key ),
56 .op_done (op_done ),
57 .op_rd_data (op_rd_data),
58 .op_rd_ack (op_rd_ack ),
59 .op_exec (op_exec ),
60 .op_rh_wl (op_rh_wl ),
61 .op_addr (op_addr ),
62 .op_wr_data (op_wr_data),
63 .led (led )
64 );
65
66 endmodule
顶层模块主要完成对其余模块的例化。在程序的第32行和33行代码例化了两个参数,分别表示PHY地址和ETH_MDC相对于输入时钟的分频系数。这里将PHY地址设置为5’h04,如果PHY地址设置错误,会导致对MDIO接口的读写操作失败。另外需要注意的是,ETH_MDC的时钟频率不能超过12.5Mhz。
由前面的MDIO接口读写时序图我们可以发现,MDIO驱动模块非常适合采用状态机来编写。状态机的状态跳转图如图 27.4.3所示,总共有6个状态,分别为st_idle(空闲状态)、st_pre(发送前导码状态)、st_start(发送帧开始+操作码)、st_addr(发送PHY地址+寄存器地址)、st_wr_data(发送TA+写入数据)和st_rd_data(接收TA+接收数据)。当状态机处于空闲状态时,如果触发信号拉高(op_exec=1),状态机进入发送前导码状态。另外当状态机处于st_addr时,在发送完PHY地址和寄存器地址之后,接下来状态机根据读或者写操作来跳转至st_wr_data状态或者st_rd_data状态。在读或者写完数据后,状态机重新跳转至空闲状态。
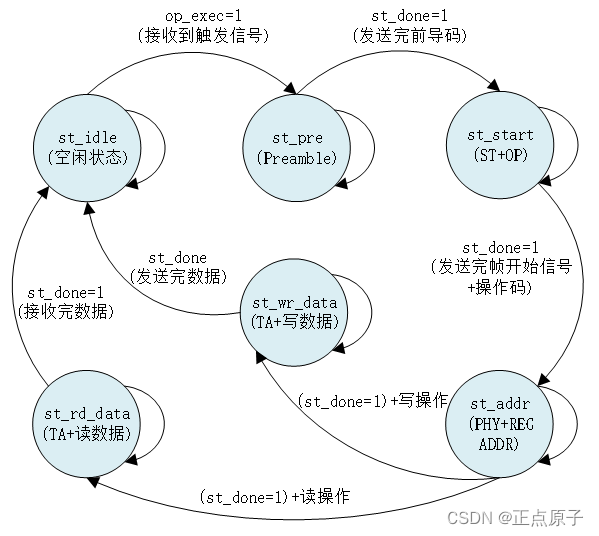
图 27.4.3 状态跳转图
程序中我们采用的是三段式状态机,由于代码较长,这里仅贴出部分代码,代码如下:
65 //wire define
66 wire mdio_in ; //MDIO数据输入
67 wire [5:0] clk_divide ; //PHY_CLK的分频系数
68
69 assign eth_mdio = mdio_dir ? mdio_out : 1'bz; //控制双向io方向
70 assign mdio_in = eth_mdio; //MDIO数据输入
71 //将PHY_CLK的分频系数除以2,得到dri_clk的分频系数,方便对MDC和MDIO信号操作
72 assign clk_divide = CLK_DIV >> 1;
73
74 //分频得到dri_clk时钟
75 always @(posedge clk or negedge rst_n) begin
76 if(!rst_n) begin
77 dri_clk <= 1'b0;
78 clk_cnt <= 1'b0;
79 end
80 else if(clk_cnt == clk_divide[5:1] - 1'd1) begin
81 clk_cnt <= 1'b0;
82 dri_clk <= ~dri_clk;
83 end
84 else
85 clk_cnt <= clk_cnt + 1'b1;
86 end
87
88 //产生PHY_MDC时钟
89 always @(posedge dri_clk or negedge rst_n) begin
90 if(!rst_n)
91 eth_mdc <= 1'b1;
92 else if(cnt[0] == 1'b0)
93 eth_mdc <= 1'b1;
94 else
95 eth_mdc <= 1'b0;
96 end
省略部分代码……
225 st_wr_data : begin
226 case(cnt)
227 7'd1 : mdio_out <= 1'b1; //发送TA,写操作(2'b10)
228 7'd3 : mdio_out <= 1'b0;
229 7'd5 : mdio_out <= wr_data_t[15];//发送写寄存器数据
230 7'd7 : mdio_out <= wr_data_t[14];
231 7'd9 : mdio_out <= wr_data_t[13];
232 7'd11: mdio_out <= wr_data_t[12];
233 7'd13: mdio_out <= wr_data_t[11];
234 7'd15: mdio_out <= wr_data_t[10];
235 7'd17: mdio_out <= wr_data_t[9];
236 7'd19: mdio_out <= wr_data_t[8];
237 7'd21: mdio_out <= wr_data_t[7];
238 7'd23: mdio_out <= wr_data_t[6];
239 7'd25: mdio_out <= wr_data_t[5];
240 7'd27: mdio_out <= wr_data_t[4];
241 7'd29: mdio_out <= wr_data_t[3];
242 7'd31: mdio_out <= wr_data_t[2];
243 7'd33: mdio_out <= wr_data_t[1];
244 7'd35: mdio_out <= wr_data_t[0];
245 7'd37: begin
246 mdio_dir <= 1'b0;
247 mdio_out <= 1'b1;
248 end
249 7'd39: st_done <= 1'b1;
250 7'd40: begin
251 cnt <= 7'b0;
252 op_done <= 1'b1; //写操作完成,拉高op_done信号
253 end
254 default : ;
255 endcase
256 end
257 st_rd_data : begin
258 case(cnt)
259 7'd1 : begin
260 mdio_dir <= 1'b0; //MDIO引脚切换至输入状态
261 mdio_out <= 1'b1;
262 end
263 7'd2 : ; //TA[1]位,该位为高阻状态,不操作
264 7'd4 : op_rd_ack <= mdio_in; //TA[0]位,0(应答) 1(未应答)
265 7'd6 : rd_data_t[15] <= mdio_in; //接收寄存器数据
266 7'd8 : rd_data_t[14] <= mdio_in;
267 7'd10: rd_data_t[13] <= mdio_in;
268 7'd12: rd_data_t[12] <= mdio_in;
269 7'd14: rd_data_t[11] <= mdio_in;
270 7'd16: rd_data_t[10] <= mdio_in;
271 7'd18: rd_data_t[9] <= mdio_in;
272 7'd20: rd_data_t[8] <= mdio_in;
273 7'd22: rd_data_t[7] <= mdio_in;
274 7'd24: rd_data_t[6] <= mdio_in;
275 7'd26: rd_data_t[5] <= mdio_in;
276 7'd28: rd_data_t[4] <= mdio_in;
277 7'd30: rd_data_t[3] <= mdio_in;
278 7'd32: rd_data_t[2] <= mdio_in;
279 7'd34: rd_data_t[1] <= mdio_in;
280 7'd36: rd_data_t[0] <= mdio_in;
281 7'd39: st_done <= 1'b1;
282 7'd40: begin
283 op_done <= 1'b1; //读操作完成,拉高op_done信号
284 op_rd_data <= rd_data_t;
285 rd_data_t <= 16'd0;
286 cnt <= 7'd0;
287 end
288 default : ;
289 endcase
在程序的第69行,通过mdio_dir(MDIO引脚方向选择)信号控制eth_mdio引脚的方向,当设置成输入时,FPGA将该引脚输出高阻(1’bz);当设置成输出时,将FPGA驱动的mdio_out信号连接至eth_mdio。
由于eth_mdc需要在输入时钟的基础上进行分频,为了方便操作,这里先对输入的时钟进行分频,得到一个dri_clk时钟,作为MDIO驱动模块和MDIO控制模块的操作时钟。eth_mdc在dri_clk的基础上进行2分频,由于输入的参数CLK_DIV为eth_mdc相对于输入时钟的分频系数,因此为了得到dri_clk的分频系数,需要将CLK_DIV除以2,如代码中第72行所示。
程序中第74行至第86行根据分频系数(clk_divide),得到dri_clk的时钟。在程序的第88行至第96行代码,当cnt一直累加时,eth_mdc的时钟相当于对dri_clk进行2分频。当开始对MDIO接口进行读写操作时,cnt累加,此时才会产生eth_mdc时钟;当读写操作结束后,cnt等于0,eth_mdc将一直处于高电平。
需要说明的是,由于clk_divide等于CLK_DIV除以2,程序中第74行至第86行代码只支持偶数分频,所以最终生成的eth_mdc的时钟频率相比于输入的CLK_DIV可能产生偏差。本次实验中,CLK_DIV等于16,因此clk_divide等于8,dri_clk的时钟频率为12.5Mhz,eth_mdc为6.25Mhz。
程序的第255行至289行代码为状态机的st_wr_data(发送TA+写入数据)和st_rd_data(接收TA+接收数据)状态。在st_wr_data状态下,数据是在eth_mdc的下降沿写入,而在st_rd_data状态,数据在erth_mdc的上升沿读出。值得一提是,在st_rd_data状态下,程序中根据TA的第二位,判断PHY芯片有没有应答,如果没有应答,则说明读取数据失败,如程序中第264行代码所示。
MDIO接口读PHYSR寄存器的ILA波形图如下图所示:
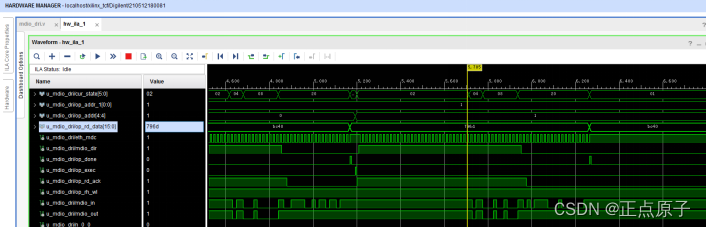
图 27.4.4 MDIO接口读操作ILA波形图
由上图可知,op_exec的脉冲信号作为MDIO接口读写的触发信号,图中op_rh_wl为高电平,表示读操作,op_addr寄存器地址为5’h11。在TA位时,mdio_dir由高电平切换至低电平,表示MDIO引脚由输出切换至输入,随后op_rd_ack变为低电平,说明PHY芯片应答成功。在整个读操作结束后,MDIO驱动模块产生一个脉冲的op_done信号,此时从状态寄存器中读出的数据为0x796d。
MDIO控制模块代码如下:
1 module mdio_ctrl(
2 input clk ,
3 input rst_n ,
4 input soft_rst_trig , //软复位触发信号
5 input op_done , //读写完成
6 input [15:0] op_rd_data , //读出的数据
7 input op_rd_ack , //读应答信号 0:应答 1:未应答
8 output reg op_exec , //触发开始信号
9 output reg op_rh_wl , //低电平写,高电平读
10 output reg [4:0] op_addr , //寄存器地址
11 output reg [15:0] op_wr_data , //写入寄存器的数据
12 output [1:0] led //LED灯指示以太网连接状态
13 );
14
15 //reg define
16 reg rst_trig_d0;
17 reg rst_trig_d1;
18 reg rst_trig_flag; //soft_rst_trig信号触发标志
19 reg [23:0] timer_cnt; //定时计数器
20 reg timer_done; //定时完成信号
21 reg start_next; //开始读下一个寄存器标致
22 reg read_next; //处于读下一个寄存器的过程
23 reg link_error; //链路断开或者自协商未完成
24 reg [2:0] flow_cnt; //流程控制计数器
25 reg [1:0] speed_status; //连接速率
26
27 //wire define
28 wire pos_rst_trig; //soft_rst_trig信号上升沿
29
30 //采soft_rst_trig信号上升沿
31 assign pos_rst_trig = ~rst_trig_d1 & rst_trig_d0;
32 //未连接或连接失败时led赋值00
33 // 01:10Mbps 10:100Mbps 11:1000Mbps 00:其他情况
34 assign led = link_error ? 2'b00: speed_status;
35 //对soft_rst_trig信号延时打拍
36 always @(posedge clk or negedge rst_n) begin
37 if(!rst_n) begin
38 rst_trig_d0 <= 1'b0;
39 rst_trig_d1 <= 1'b0;
40 end
41 else begin
42 rst_trig_d0 <= soft_rst_trig;
43 rst_trig_d1 <= rst_trig_d0;
44 end
45 end
46
47 //定时计数
48 always @(posedge clk or negedge rst_n) begin
49 if(!rst_n) begin
50 timer_cnt <= 1'b0;
51 timer_done <= 1'b0;
52 end
53 else begin
54 if(timer_cnt == 24'd1_000_000 - 1'b1) begin
55 timer_done <= 1'b1;
56 timer_cnt <= 1'b0;
57 end
58 else begin
59 timer_done <= 1'b0;
60 timer_cnt <= timer_cnt + 1'b1;
61 end
62 end
63 end
64
65 //根据软复位信号对MDIO接口进行软复位,并定时读取以太网的连接状态
66 always @(posedge clk or negedge rst_n) begin
67 if(!rst_n) begin
68 flow_cnt <= 3'd0;
69 rst_trig_flag <= 1'b0;
70 speed_status <= 2'b00;
71 op_exec <= 1'b0;
72 op_rh_wl <= 1'b0;
73 op_addr <= 1'b0;
74 op_wr_data <= 1'b0;
75 start_next <= 1'b0;
76 read_next <= 1'b0;
77 linkerro <= 1'b0;
78 end
79 else begin
80 op_exec <= 1'b0;
81 if(pos_rst_trig)
82 rst_trig_flag <= 1'b1; //拉高软复位触发标志
83 case(flow_cnt)
84 2'd0 : begin
85 if(rst_trig_flag) begin //开始对MDIO接口进行软复位
86 op_exec <= 1'b1;
87 op_rh_wl <= 1'b0;
88 op_addr <= 5'h00;
89 op_wr_data <= 16'hB100; //Bit[15]=1'b1,表示软复位
90 flow_cnt <= 3'd1;
91 end
92 else if(timer_done) begin //定时完成,获取以太网连接状态
93 op_exec <= 1'b1;
94 op_rh_wl <= 1'b1;
95 op_addr <= 5'h01;
96 flow_cnt <= 3'd2;
97 end
98 else if(start_next) begin //开始读下一个寄存器,获取以太网通信速度
99 op_exec <= 1'b1;
100 op_rh_wl <= 1'b1;
101 op_addr <= 5'h1A;
102 flow_cnt <= 3'd2;
103 start_next <= 1'b0;
104 read_next <= 1'b1;
105 end
106 end
107 2'd1 : begin
108 if(op_done) begin //MDIO接口软复位完成
109 flow_cnt <= 3'd0;
110 rst_trig_flag <= 1'b0;
111 end
112 end
113 2'd2 : begin
114 if(op_done) begin //MDIO接口读操作完成
115 if(op_rd_ack == 1'b0 && read_next == 1'b0)
116 flow_cnt <= 3'd3; //读第一个寄存器,接口成功应答,
117 else if(op_rd_ack == 1'b0 && read_next == 1'b1)begin
118 read_next <= 1'b0; //读第下一个寄存器,接口成功应答
119 flow_cnt <= 3'd4;
120 end
121 else begin
122 flow_cnt <= 3'd0;
123 end
124 end
125 end
126 2'd3 : begin
127 flow_cnt <= 3'd0; //链路正常并且自协商完成
128 if(op_rd_data[5] == 1'b1 && op_rd_data[2] == 1'b1)begin
129 start_next <= 1;
130 link_error <= 0;
131 end
132 else begin
133 link_error <= 1'b1;
134 end
135 end
136 3'd4: begin
137 flow_cnt <= 3'd0;
138 if(op_rd_data[5:4] == 2'b10)
139 speed_status <= 2'b11; //1000Mbps
140 else if(op_rd_data[5:4] == 2'b01)
141 speed_status <= 2'b10; //100Mbps
142 else if(op_rd_data[5:4] == 2'b00)
143 speed_status <= 2'b01; //10Mbps
144 else
145 speed_status <= 2'b00; //其他情况
146 end
147 endcase
148 end
149 end
150
151 endmodule
程序中第48至第63行代码实现计数定时的功能,每当计数器计数到1000000-1时,会产生一个周期的脉冲信号(timer_done)。该模块输入的时钟频率为12.5Mhz,因此定时周期为80ms。
程序中第62行至第125行代码根据软复位信号对MDIO接口进行软复位,并定时读取以太网的连接状态。其中程序中第138行至145行代码,根据状态寄存器的值,为连接速率状态位(speed_status)赋值。
27.5下载验证
将下载器一端连接电脑,另一端与开发板上的JTAG下载口连接,将网线一端连接开发板的PL网口(PL_ETH),另一端连接电脑的网口或者路由器,最后连接电源线后拨动开关按键给开发板上电,PL_ETH网口的位置如下图所示。
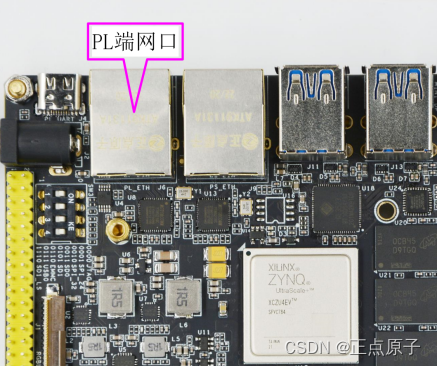
图 27.5.1 PL_ETH网口位置
点击Vivado左侧“Flow Navigator”窗口最下面的“Open Hardware Manager”,此时Vivado软件识别到下载器,点击“Hardware”窗口中“Program Device”下载程序,在弹出的界面中选择“Program”下载程序。
程序下载完成后,等待几秒即可看到开发板PL LED灯的点亮状态,如下图所示:
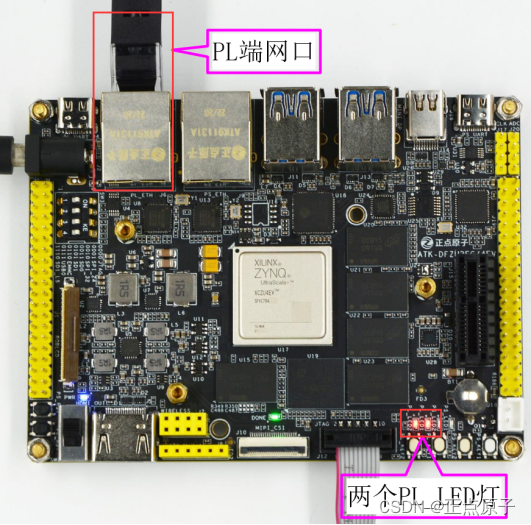
图 27.5.2 开发板实验现象
如上图可知,PL的两个LED灯都处于点亮状态,因此通信速率为1000Mbps。如果按下PL _KEY1按键会对PHY进行软复位,此时PHY芯片会重新开始与另一端设备进行自协商,等待几秒后,PL LED灯重新点亮。
另外,如果开发板另一端连接的是电脑的网口,此时可以查看自协商后的通信速率。查看方法是点击电脑右下角的网络图标,会看到本地连接刚开始显示的是正在识别,一段时间之后显示未识别的网络,打开方式如下图所示(WIN7和WIN10操作可能存在差异,但基本相同)。

图 27.5.3 点击网络图标
点击图 27.5.3中的“未识别的网络(无Internet)”,弹出如下图所示界面。

图 27.5.4 网络设置界面
点击“更改适配器”选项,弹出如下图所示界面。

图 27.5.5 “网络适配器界面”
如果看到上图“以太网”显示未识别的网络之后,说明硬件连接是没有问题的,接下来鼠标右击以太网,选择 “连接”,如图 27.5.6和图 27.5.7所示。

图 27.5.6 鼠标右击后选择“状态

图 27.5.7 以太网连接速度
由上图可知,开发板和电脑自协商的通信速率为1Gbps(1000Mbps)。
![[附源码]Python计算机毕业设计SSM健身房管理系统(程序+LW)](https://img-blog.csdnimg.cn/82e218dccbe846febad7fb4c0906e364.png)




![[Java反序列化]—CommonsCollections6](https://img-blog.csdnimg.cn/9acbc52247cf487ea974508c8641c140.png)