-
目标检测的基本范式
-
什么是目标检测
-
目标检测 vs 图像分类
-
-
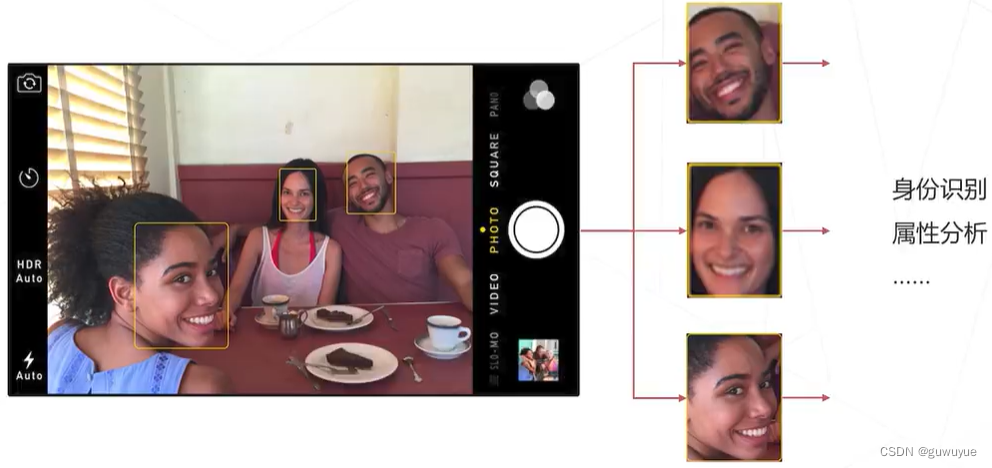
目标检测 in 人脸识别
-
目标检测 in 智慧城市
-
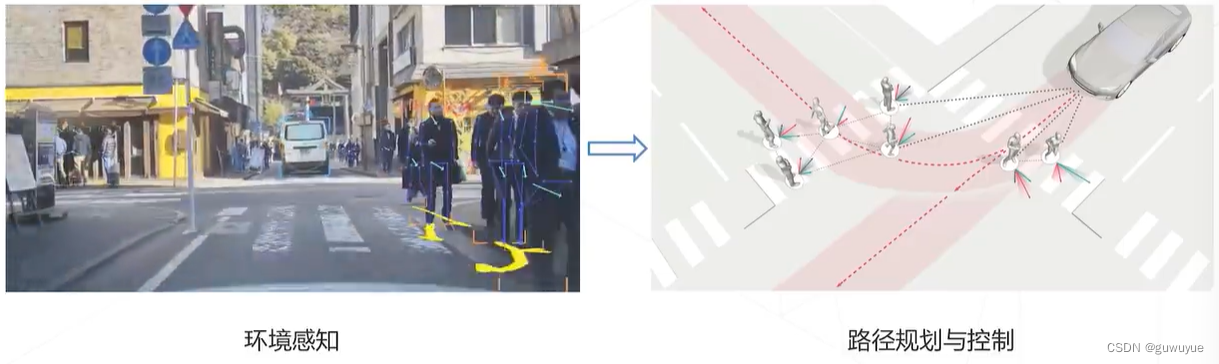
目标检测 in 自动驾驶
-
目标检测 in 下游视觉任务
-
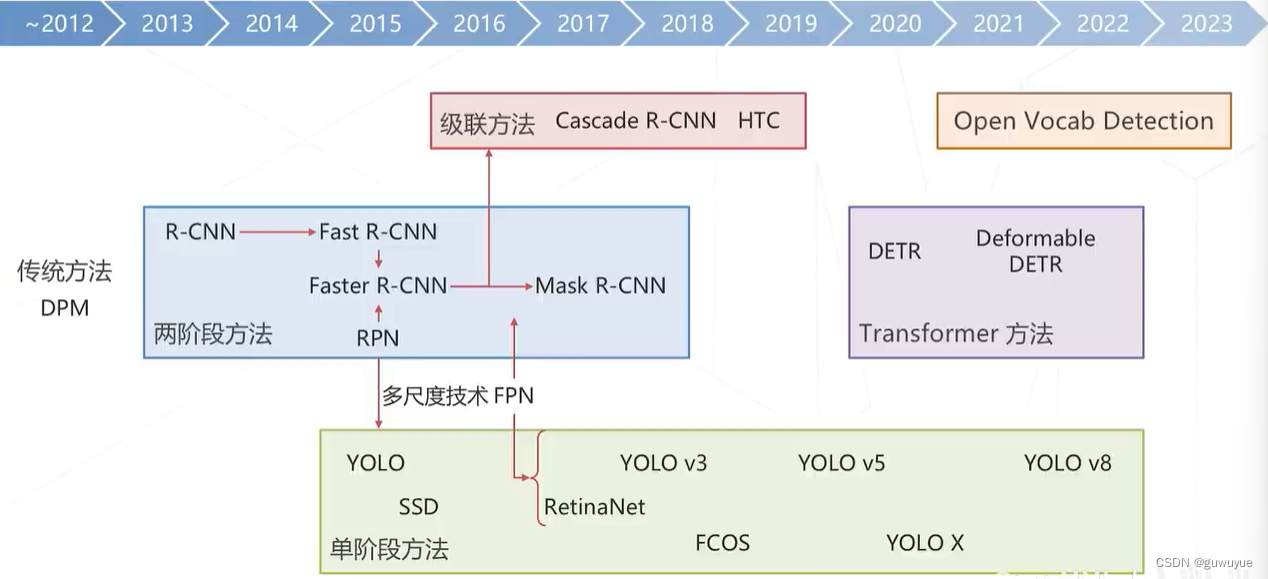
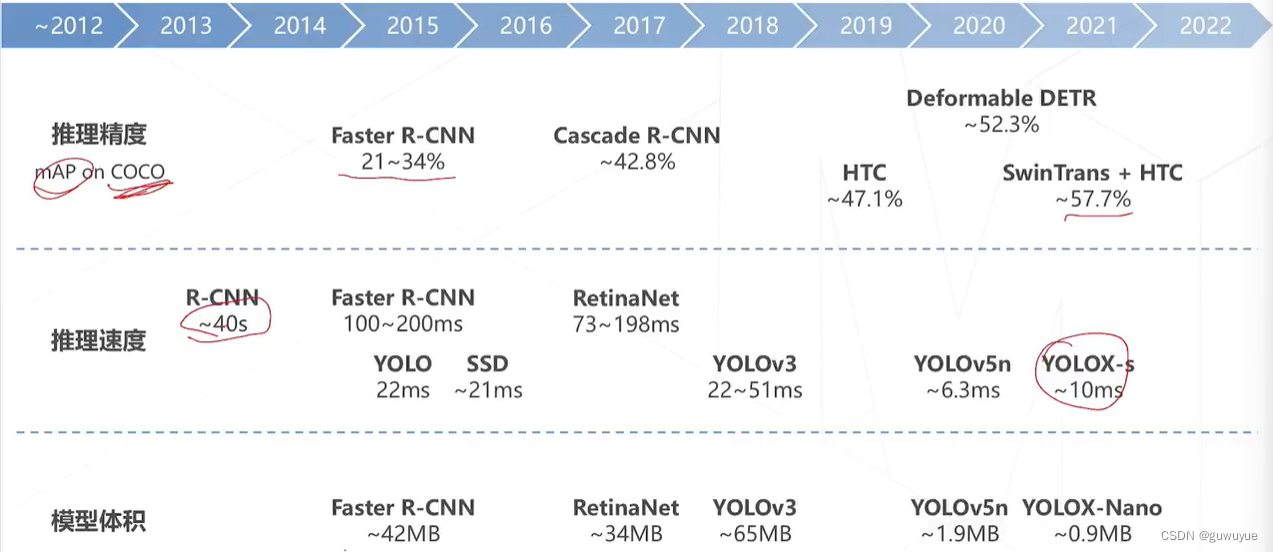
目标检测技术的演进
-
-
基础知识
-
框、边界框(Bounding Box)
-
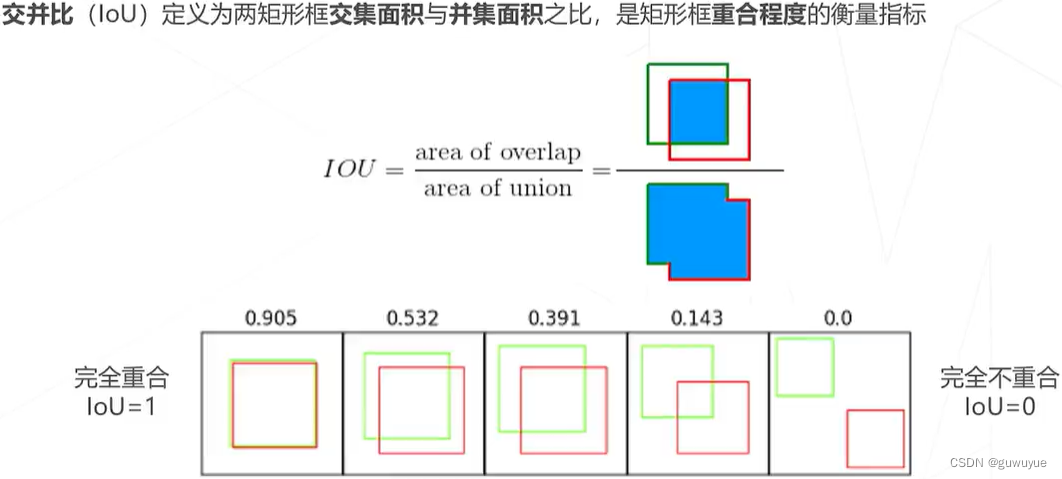
交并比 Intersection Over Union
-
-
目标检测的基本思路(从滑窗到密集预测)
-
检测问题的难点
-
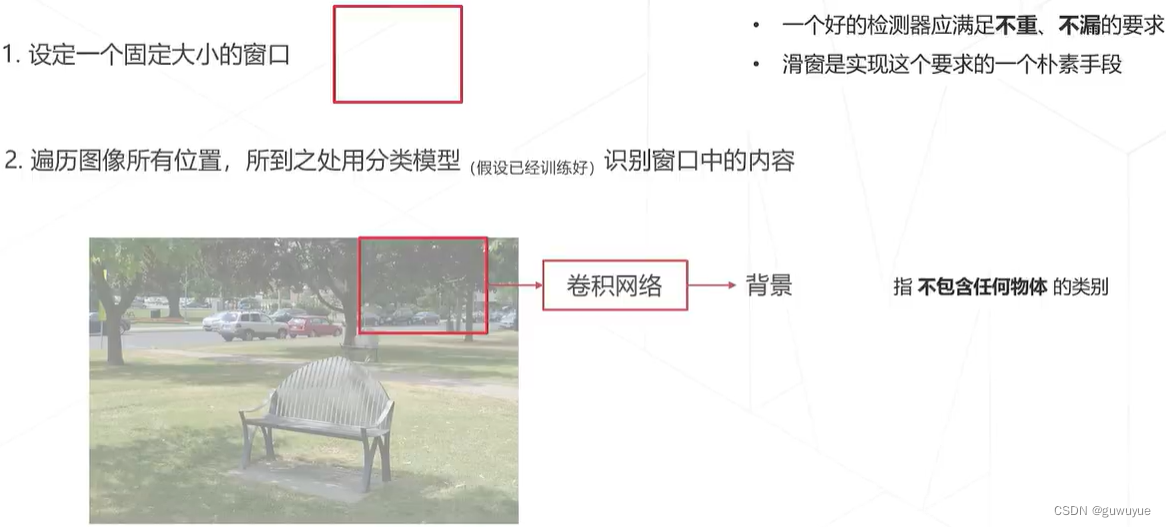
滑窗 Sliding Widow
-
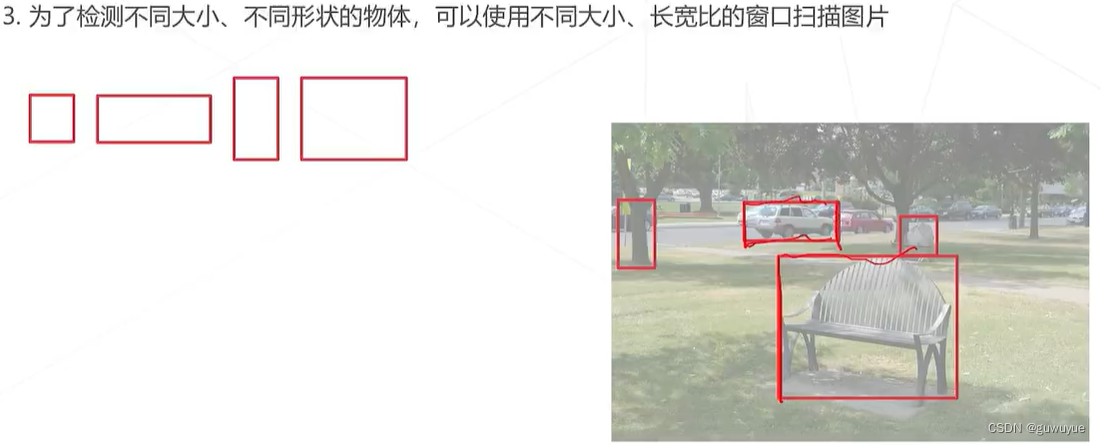
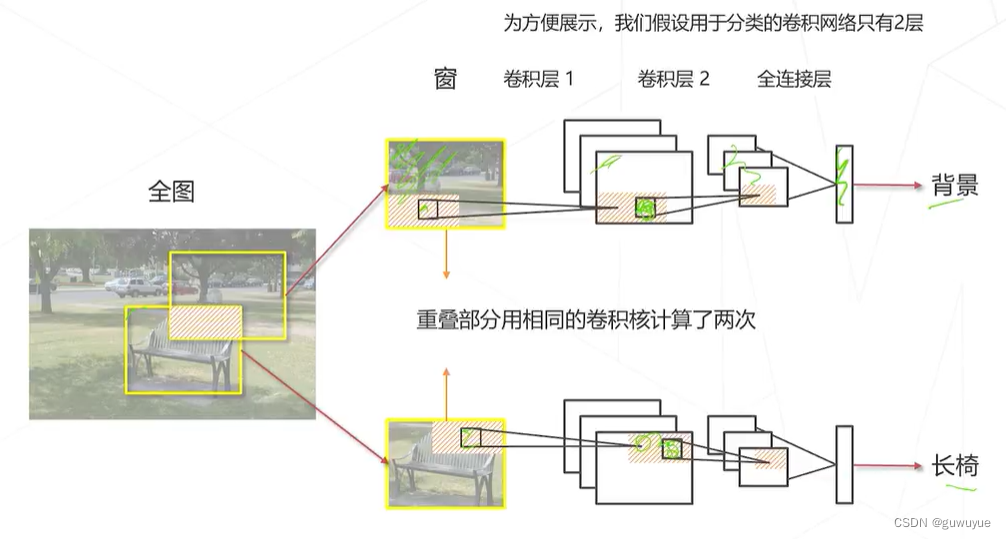
- 滑窗的效率问题
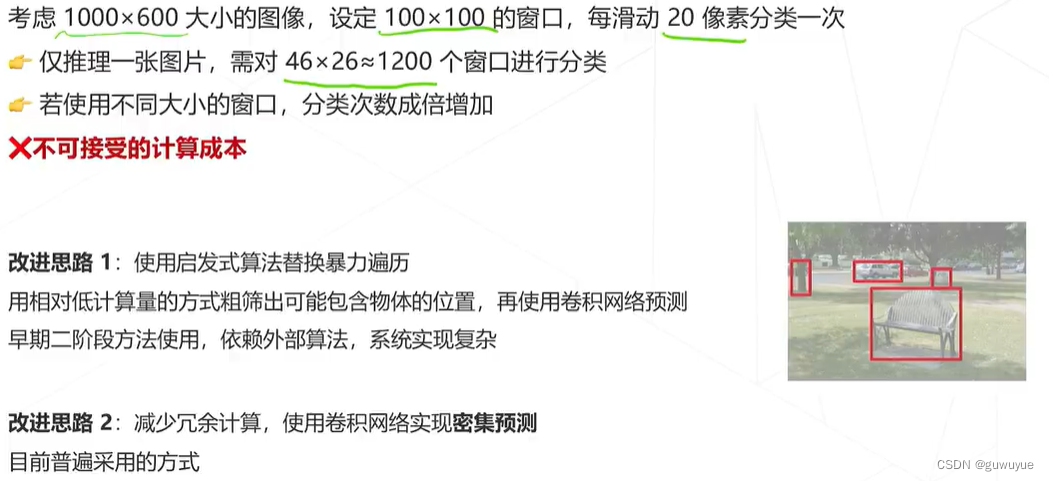
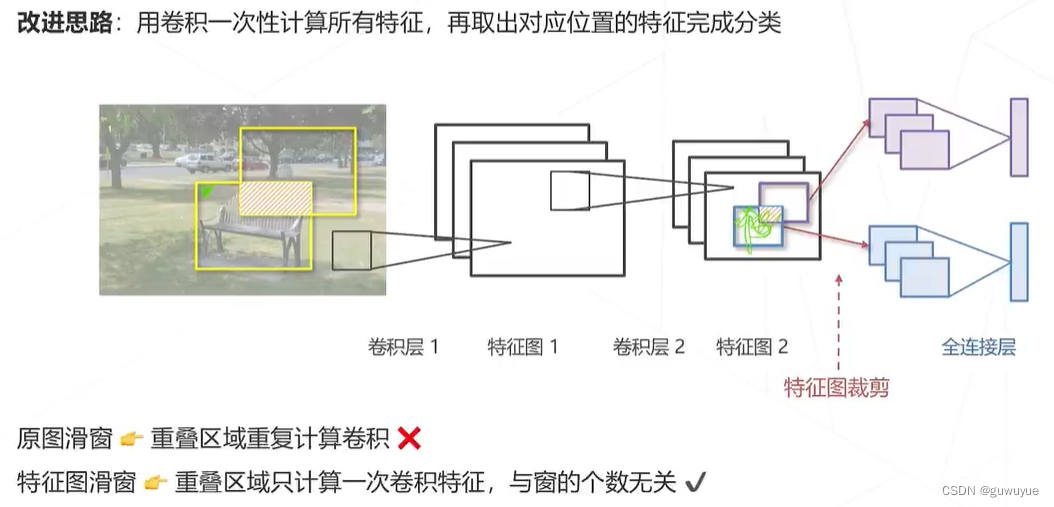
- 改进思路2:分析滑窗中的重复计算
- 消除滑窗中的重复计算
-
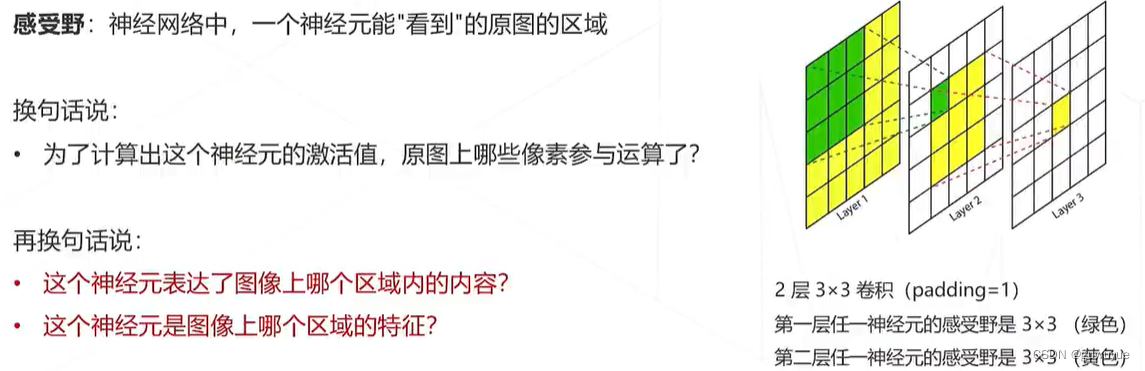
感受野(Receptive Field)
-
-
感受野的中心和步长
-
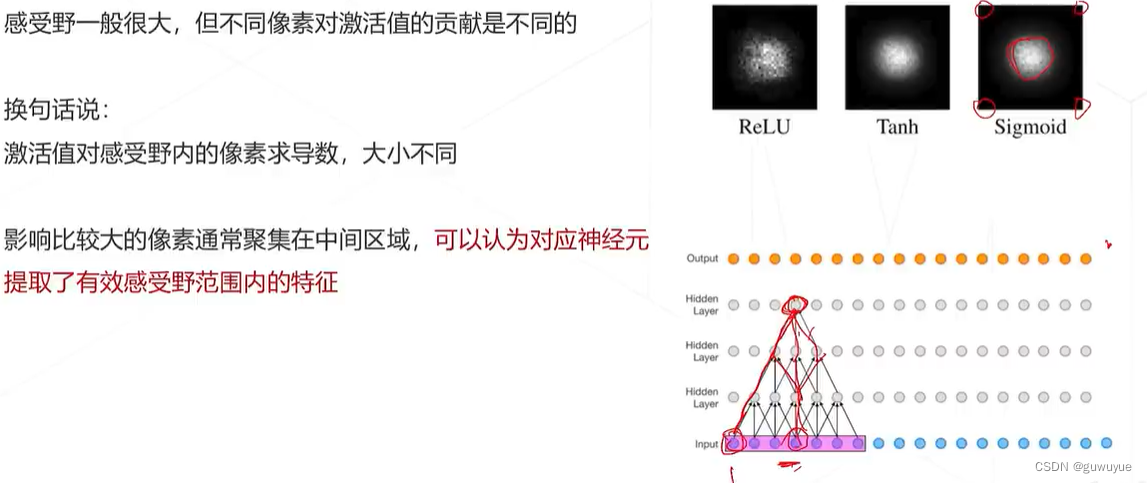
- 有效感受野(Effective RF)
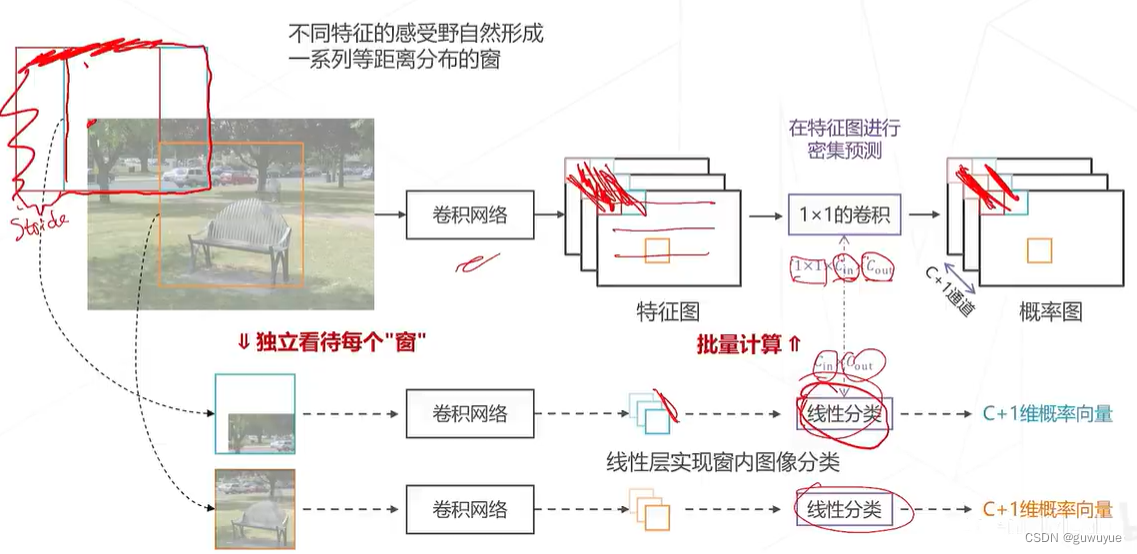
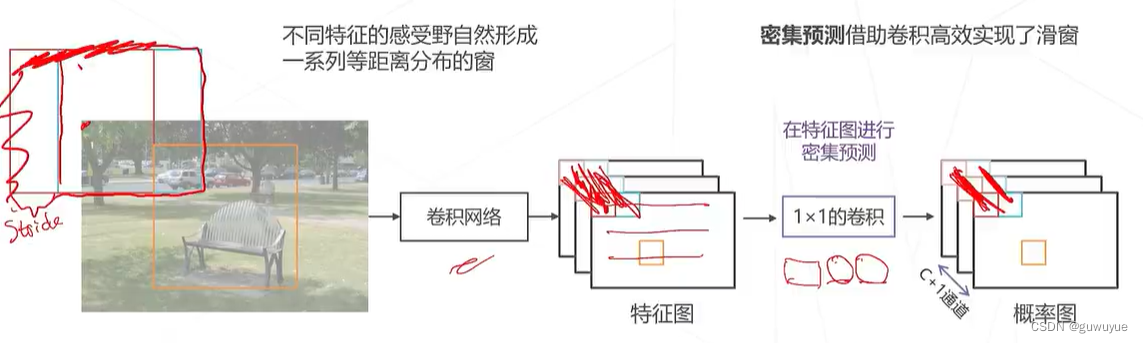
- 在特征图上进行密集预测
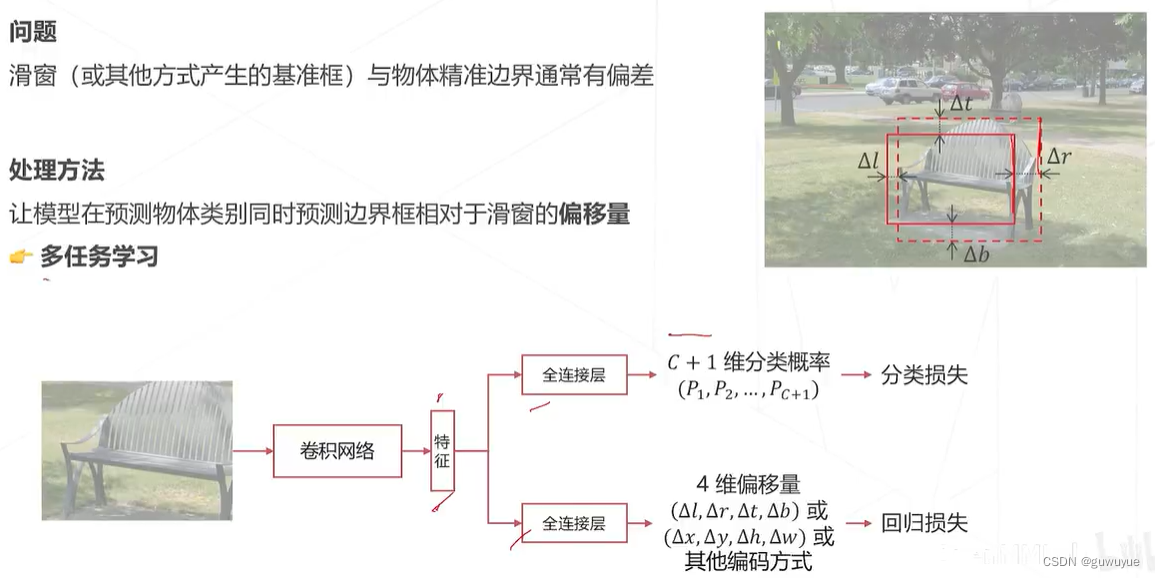
- 边界框回归 Bounding Box Regression
- 基于锚框 vs 无锚框
- 非极大值抑制 Non-Maximum Suppression
-
置信度 Confidence Score
-
- 使用密集预测模型进行推理
- 基本流程:
- 用模型做密集预测,得到预测图,每个位置包含类别概率、边界框回归的预测结果
- 保留预测类别不是背景的“框”
- 基于“框”中心,和边界框回归结果,进行边界框解码
- 后处理:非极大值抑制(Non-Maximum Suppression)
- 基本流程:
- 啊
-
- 滑窗·
- 使用卷积实现密集预测
- 锚框
- 多尺度检测与FPN
-
-
单阶段 & 无锚框检测器 选讲
- RPN
- YOLO、SSD
- Focal Loss 与 RetinaNet
- FCOS
- YOLO系列选讲
-
更多检测算法介绍
- 两阶段和多阶段算法
- DETR
- 实例分割
-
目标检测的评测
AI实战营:目标检测与MMDetection
news2026/2/12 21:55:24








本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/630256.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

奇舞周刊第495期:软件高可用实践那些事
记得点击文章末尾的“ 阅读原文 ”查看哟~ 下面先一起看下本期周刊 摘要 吧~ 奇舞推荐 ■ ■ ■ 软件高可用实践那些事儿 本文从高可用落地实践的角度,通过协作效率,技术落地和运营规范等几个层面,阐述了高可用具体实施步骤和落地细节。 浏览…
如何使用微软官方工具制作win11启动盘
windows11 启动盘制作和使用 一、启动盘制作准备二、制作步骤三、对其他电脑安装windows11系统 一、启动盘制作准备
1.至少存储空间为8GB的空白U盘 2.一台电脑
二、制作步骤
1.在官方网站中选择下载工具,选择创建windows11安装,下载完毕之后ÿ…
混淆矩阵、准确率、召回率、漏报率、误报率、F1分数
1、混淆矩阵 在二分类问题中,混淆矩阵被用来度量模型的准确率。因为在二分类问题中单一样本的预测结果只有Yes or No,即:真或者假两种结果,所以全体样本的经二分类模型处理后,处理结果不外乎四种情况,每种情…
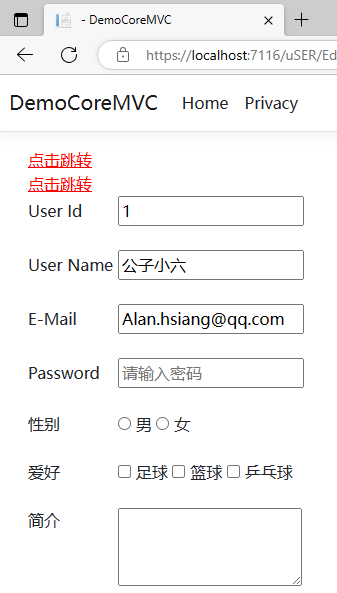
ASP.NET Core MVC 从入门到精通之Html辅助标签(一)
随着技术的发展,ASP.NET Core MVC也推出了好长时间,经过不断的版本更新迭代,已经越来越完善,本系列文章主要讲解ASP.NET Core MVC开发B/S系统过程中所涉及到的相关内容,适用于初学者,在校毕业生,…
微信小程序快速入门【一】
微信小程序快速入门【一】 文章目录 微信小程序快速入门【一】👨🏫内容1:背景👨⚖️内容2:准备工作👨💻内容3:新建一个小程序🍉文末推荐 👨…
有关 python 切片的趣事
哈喽大家好,我是咸鱼
今天来讲一个我在实现 python 列表切片时遇到的趣事
在正式开始之前,我们先来了解一下切片(slice)
切片操作是访问序列(列表、字符串…)中元素的另一种方法,它可以访问一…

![【PWN · ret2text | ‘/bin/sh‘写在bss段】[HNCTF 2022 Week1]ezr0p32](https://img-blog.csdnimg.cn/52188216b1294d82a0df24f501ad87c1.png)
【PWN · ret2text | ‘/bin/sh‘写在bss段】[HNCTF 2022 Week1]ezr0p32
目录
前言
一、题目
二、解题过程
payload的构造
三、exp
总结 前言
一直在做libc的中规中矩的题目,遇到一题有点老的类型的题目有些陌生。但其实其中原理比较简单,但是涉及到/bin/sh获取的常规操作,而自己也没整理过,于…

springboot+vue体育馆场地器材管理系统的设计与实现
体育馆管理系统有管理员和用户两个角色。用户功能有场地信息,员工信息,器材信息,留言反馈,个人中心。管理员功能有个人中心,用户管理,场地信息管理,场地类型管理,员工信息管理&#…

Redis - 缓存雪崩,缓存穿透,缓存击穿
Redis是一个完全开源的,遵守BSD协议的,高性能的key-value的数据存储结构系统,它支持数据持久化,可以将内存中的数据保存在磁盘中。不仅支持简单的key-value类型的数据结构,同事还提供list,zset,…
ChatGPT+小红书的8种高级玩法
掌握了这套万能命令,让你快速做出小红书爆款文案! 一、用ChatGPT做定位
我是一个大龄的普通人,没有什么特殊的技能,接下来,请你作为一位小红书的账号定位专家,通过与我对话的方式,为我找到我的小红书账号定…

Hive | 报错锦集
知识目录 一、写在前面✨二、Hive启动hiveserver2报错🔥三、HiveServer2启动方式✨四、Hive执行SQL语句报一大堆日志🍉五、Hive使用Load加载数据报错🍭六、Hive执行含Count的SQL语句报错🍉七、Hive执行SQL语句报/bin/java…
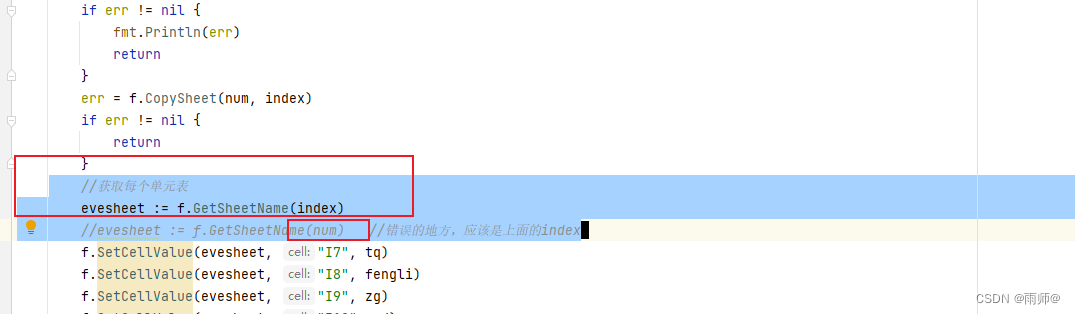
golang 读取csv文件到excel--推荐使用【不同实现方式】
需求:把下面的csv文件,自动写入到excel模版中,
1.自动按照csv的行数,以日期时间名问sheet名成写入到excel表的sheet名称中
2.自动复制excel的第一个sheet的所有内容,同时用csv文件的内容填充特定区域内容
xy1.csv文…
Django--创建项目与app的初步认识
目前我是想学习Django来搭建一个网站,记录一下我学初学的过程与遇到的问题。
我直接使用pycharm来创建一个Django项目,就不用在终端输入命令行的方式创建虚拟环境。 在终端输入,python manage.py runserver,点击连接web页面进行测…

为什么说python里面函数参数的默认值最好不要使用可变类型
之前发布过Python中函数的介绍:Python中函数的介绍 ,今天来做一个小小的补充说明:为什么说python里面函数参数的默认值最好不要使用可变类型 Python中,函数参数的默认值是在函数定义时计算的,而不是在每次函数调用时计…
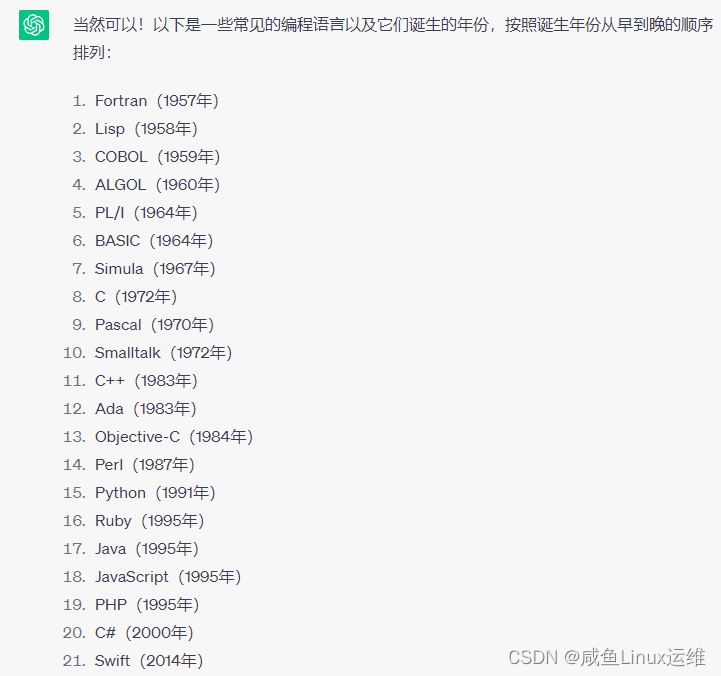
机器人与外星人的对话:中国传统哲学的精髓是什么?
一天,机器人Robot和外星人Vick相遇,他俩聊了很多,主要是关于中国传统哲学的,下面是他俩的对话记录。 R:很多人表示他们很痛苦,禅师说那是因为“无明”,外星人,你怎么看? …

【P58】JMeter 简单数据写入器(Simple Data Writer)
文章目录 一、简单数据写入器(Simple Data Writer)参数说明二、准备工作三、测试计划设计 一、简单数据写入器(Simple Data Writer)参数说明
可以将原始数据直接保存到文件
使用场景:一般与 HTML 报告配合使用
使用…