自适应滤波有很多种方式,也很实用
一、自适应滤波基本思想
函数模型
{
X
k
=
Φ
k
/
k
−
1
X
k
−
1
+
Γ
k
−
1
W
k
−
1
Z
k
=
H
k
X
k
+
V
k
\left\{\begin{array}{l} \boldsymbol{X}_{k}=\boldsymbol{\Phi}_{k / k-1} \boldsymbol{X}_{k-1}+\boldsymbol{\Gamma}_{k-1} \boldsymbol{W}_{k-1} \\ \boldsymbol{Z}_{k}=\boldsymbol{H}_{k} \boldsymbol{X}_{k}+\boldsymbol{V}_{k} \end{array}\right.
{Xk=Φk/k−1Xk−1+Γk−1Wk−1Zk=HkXk+Vk
随机模型
{
E
[
W
k
]
=
q
k
,
E
[
W
k
W
j
T
]
=
Q
k
δ
k
j
E
[
V
k
]
=
r
k
,
E
[
V
k
V
j
T
]
=
R
k
δ
k
j
E
[
W
k
V
j
T
]
=
0
\left\{\begin{array}{lc}{\color{red}\mathrm{E}\left[\boldsymbol{W}_{k}\right]=\boldsymbol{q}_{k}}, & \mathrm{E}\left[\boldsymbol{W}_{k} \boldsymbol{W}_{j}^{\mathrm{T}}\right]=\boldsymbol{Q}_{k} \delta_{k j} \\ {\color{red}\mathrm{E}\left[\boldsymbol{V}_{k}\right]=\boldsymbol{r}_{k}}, & \mathrm{E}\left[\boldsymbol{V}_{k} \boldsymbol{V}_{j}^{\mathrm{T}}\right]=\boldsymbol{R}_{k} \delta_{k j} \\ \mathrm{E}\left[\boldsymbol{W}_{k} \boldsymbol{V}_{j}^{\mathrm{T}}\right]=\mathbf{0} & \end{array}\right.
⎩
⎨
⎧E[Wk]=qk,E[Vk]=rk,E[WkVjT]=0E[WkWjT]=QkδkjE[VkVjT]=Rkδkj
系统噪声和量测噪声都不是零均值,且噪声的均值和方差都未知,用标准Kalman滤波没法做。
基本原理:噪声参数不准会影响系统输出,利用输出边作状态估计边作噪声辨识,需要系统的可观测新比较强。
- 噪声均值均可等效于状态增广。把噪声分解成零均值部分和非零均值部分,非零均值的部分作为状态一并估计。所以对系统噪声和量测噪声的均值用自适应方法没有必要,真的未知又想估计它,就把它扩维增广为状态。
- 系统噪声方差难以自适应,代表系统的状态,一般来说系统比较稳定,做自适应比较难。
- 量测噪声方差相对容易自适应,代表仪器和环境的状态,有可能时好时坏,用自适应效果比较好。
- 应尽量减少噪声自适应参数的数目,可以只对容易变化的量测做自适应。
二、量测噪声方差阵自适应算法
新息和新息的方差
Z
~
k
/
k
−
1
=
Z
k
−
Z
^
k
/
k
−
1
=
H
k
X
k
+
V
k
−
H
k
X
^
k
/
k
−
1
=
H
k
X
~
k
/
k
−
1
+
V
k
E
[
Z
~
k
/
k
−
1
Z
~
k
/
k
−
1
T
]
=
H
k
P
k
/
k
−
1
H
k
T
+
R
k
\begin{array}{l} \tilde{\boldsymbol{Z}}_{k / k-1}=\boldsymbol{Z}_{k}-\hat{\boldsymbol{Z}}_{k / k-1}=\boldsymbol{H}_{k} \boldsymbol{X}_{k}+\boldsymbol{V}_{k}-\boldsymbol{H}_{k} \hat{\boldsymbol{X}}_{k / k-1}=\boldsymbol{H}_{k} \tilde{\boldsymbol{X}}_{k / k-1}+\boldsymbol{V}_{k} \\ \mathrm{E}\left[\tilde{\boldsymbol{Z}}_{k / k-1} \tilde{\boldsymbol{Z}}_{k / k-1}^{\mathrm{T}}\right]=\boldsymbol{H}_{k} \boldsymbol{P}_{k / k-1} \boldsymbol{H}_{k}^{\mathrm{T}}+\boldsymbol{R}_{k} \quad \\ \end{array}
Z~k/k−1=Zk−Z^k/k−1=HkXk+Vk−HkX^k/k−1=HkX~k/k−1+VkE[Z~k/k−1Z~k/k−1T]=HkPk/k−1HkT+Rk
想估计
R
R
R ,就认为左边都已知,就是新息量测值的方差减去预测量测值方差
R
k
=
E
[
Z
~
k
/
k
−
1
Z
~
k
/
k
−
1
T
]
−
H
k
P
k
/
k
−
1
H
k
T
\boldsymbol{R}_{k}=\mathrm{E}\left[\tilde{\boldsymbol{Z}}_{k / k-1} \tilde{\boldsymbol{Z}}_{k / k-1}^{\mathrm{T}}\right]-\boldsymbol{H}_{k} \boldsymbol{P}_{k / k-1} \boldsymbol{H}_{k}^{\mathrm{T}}
Rk=E[Z~k/k−1Z~k/k−1T]−HkPk/k−1HkT
这种的满足只是统计上整体的满足,不是说每一次测量都应该满足。
以估计房间的温度的例子来说:预测下一时刻的量测温度,再用温度计量测一下,只利用两个的值来确定量测噪声,仅仅只是一个样本;要得到方差,需要很多个房间,很多次测量算出来的才是 R k R_k Rk,才得出统计结果。
实际做Kalman滤波研究的往往只有一个样本,用时间平均来算,多个时刻的数据得出
R
k
R_k
Rk 。并且写成递推的形式如下:
R
^
k
=
1
k
∑
i
=
1
k
(
Z
~
i
/
i
−
1
Z
~
i
/
i
−
1
T
−
H
i
P
i
/
i
−
1
H
i
T
)
=
1
k
[
∑
i
=
1
k
−
1
(
Z
~
i
/
i
−
1
Z
~
i
/
i
−
1
T
−
H
i
P
i
/
i
−
1
H
i
T
)
+
(
Z
~
k
/
k
−
1
Z
~
k
/
k
−
1
T
−
H
k
P
k
/
k
−
1
H
k
T
)
]
=
(
1
−
1
k
)
R
^
k
−
1
+
1
k
(
Z
~
k
/
k
−
1
Z
~
k
/
k
−
1
T
−
H
k
P
k
/
k
−
1
H
k
T
)
\begin{aligned} \hat{\boldsymbol{R}}_{k} & =\frac{1}{k} \sum_{i=1}^{k}\left(\tilde{\boldsymbol{Z}}_{i / i-1} \tilde{\boldsymbol{Z}}_{i / i-1}^{\mathrm{T}}-\boldsymbol{H}_{i} \boldsymbol{P}_{i / i-1} \boldsymbol{H}_{i}^{\mathrm{T}}\right) \\ & =\frac{1}{k}\left[\sum_{i=1}^{k-1}\left(\tilde{\boldsymbol{Z}}_{i / i-1} \tilde{\boldsymbol{Z}}_{i / i-1}^{\mathrm{T}}-\boldsymbol{H}_{i} \boldsymbol{P}_{i / i-1} \boldsymbol{H}_{i}^{\mathrm{T}}\right)+\left(\tilde{\boldsymbol{Z}}_{k / k-1} \tilde{\boldsymbol{Z}}_{k / k-1}^{\mathrm{T}}-\boldsymbol{H}_{k} \boldsymbol{P}_{k / k-1} \boldsymbol{H}_{k}^{\mathrm{T}}\right)\right] \\ & =\left(1-\frac{1}{k}\right) \hat{\boldsymbol{R}}_{k-1}+\frac{1}{k}\left(\tilde{\boldsymbol{Z}}_{k / k-1} \tilde{\boldsymbol{Z}}_{k / k-1}^{\mathrm{T}}-\boldsymbol{H}_{k} \boldsymbol{P}_{k / k-1} \boldsymbol{H}_{k}^{\mathrm{T}}\right)\end{aligned}
R^k=k1i=1∑k(Z~i/i−1Z~i/i−1T−HiPi/i−1HiT)=k1[i=1∑k−1(Z~i/i−1Z~i/i−1T−HiPi/i−1HiT)+(Z~k/k−1Z~k/k−1T−HkPk/k−1HkT)]=(1−k1)R^k−1+k1(Z~k/k−1Z~k/k−1T−HkPk/k−1HkT)
上式每个时刻的权重都相同,为等加权平均。统计很长时间后
1
k
\frac{1}{k}
k1 会趋于
0
0
0 ,时间越长,自适应的能力越差。
为避免此问题,可以把
K
K
K 值限定,到了一定数目之后,就不让它再增加。如采用指数渐消记忆加权平均:
R
^
k
=
(
1
−
β
k
)
R
^
k
−
1
+
β
k
(
Z
~
k
/
k
−
1
Z
~
k
/
k
−
1
T
−
H
k
P
k
/
k
−
1
H
k
T
)
\hat{\boldsymbol{R}}_{k}=\left(1-\beta_{k}\right) \hat{\boldsymbol{R}}_{k-1}+\beta_{k}\left(\tilde{\boldsymbol{Z}}_{k / k-1} \tilde{\boldsymbol{Z}}_{k / k-1}^{\mathrm{T}}-\boldsymbol{H}_{k} \boldsymbol{P}_{k / k-1} \boldsymbol{H}_{k}^{\mathrm{T}}\right)
R^k=(1−βk)R^k−1+βk(Z~k/k−1Z~k/k−1T−HkPk/k−1HkT)
其中
β
k
=
β
k
−
1
β
k
−
1
+
b
β
0
=
1
,
β
∞
=
1
−
b
,
0
<
b
<
1
\beta_{k}=\frac{\beta_{k-1}}{\beta_{k-1}+b} \quad \beta_{0}=1, \beta_{\infty}=1-b, 0<b<1
βk=βk−1+bβk−1β0=1,β∞=1−b,0<b<1 称为渐消因子。
b
b
b 一般取的接近于
1
1
1,如
0.9
、
0.99
、
0.999
0.9、0.99、0.999
0.9、0.99、0.999
式子后半部分有矩阵相减,当实际噪声比较小时,容易出现量测方差负定,可改用“序贯标量量测+方差受限”自适应方法加以解决:
受限:比如GNSS精度 1 c m 1cm 1cm,如果算出来量测方差是 1 n m 1nm 1nm 肯定有问题,可以设一个 1 c m 1cm 1cm 的限制
令
ρ
k
(
i
)
=
(
Z
~
k
/
k
−
1
(
i
)
)
2
−
H
k
(
i
)
P
k
/
k
−
1
(
i
)
(
H
k
(
i
)
)
T
\rho_{k}^{(i)}=\left(\tilde{Z}_{k / k-1}^{(i)}\right)^{2}-\boldsymbol{H}_{k}^{(i)} \boldsymbol{P}_{k / k-1}^{(i)}\left(\boldsymbol{H}_{k}^{(i)}\right)^{\mathrm{T}}
ρk(i)=(Z~k/k−1(i))2−Hk(i)Pk/k−1(i)(Hk(i))T ,
R
max
(
i
)
,
R
min
(
i
)
R_{\text {max }}^{(i)}, R_{\text {min }}^{(i)}
Rmax (i),Rmin (i) 人为设置的方差上下限,有:
R
^
k
(
i
)
=
{
(
1
−
β
k
)
R
^
k
−
1
(
i
)
+
β
k
R
min
(
i
)
ρ
k
(
i
)
<
R
min
(
i
)
R
max
(
i
)
ρ
k
(
i
)
>
R
max
(
i
)
(
1
−
β
k
)
R
^
k
−
1
(
i
)
+
β
k
ρ
k
(
i
)
others
\hat{R}_{k}^{(i)}=\left\{\begin{array}{cc}\left(1-\beta_{k}\right) \hat{R}_{k-1}^{(i)}+\beta_{k} R_{\min }^{(i)} & \rho_{k}^{(i)}<R_{\min }^{(i)} \\ R_{\max }^{(i)} & \rho_{k}^{(i)}>R_{\max }^{(i)} \\ \left(1-\beta_{k}\right) \hat{R}_{k-1}^{(i)}+\beta_{k} \rho_{k}^{(i)} & \text { others }\end{array}\right.
R^k(i)=⎩
⎨
⎧(1−βk)R^k−1(i)+βkRmin(i)Rmax(i)(1−βk)R^k−1(i)+βkρk(i)ρk(i)<Rmin(i)ρk(i)>Rmax(i) others
流程如下:
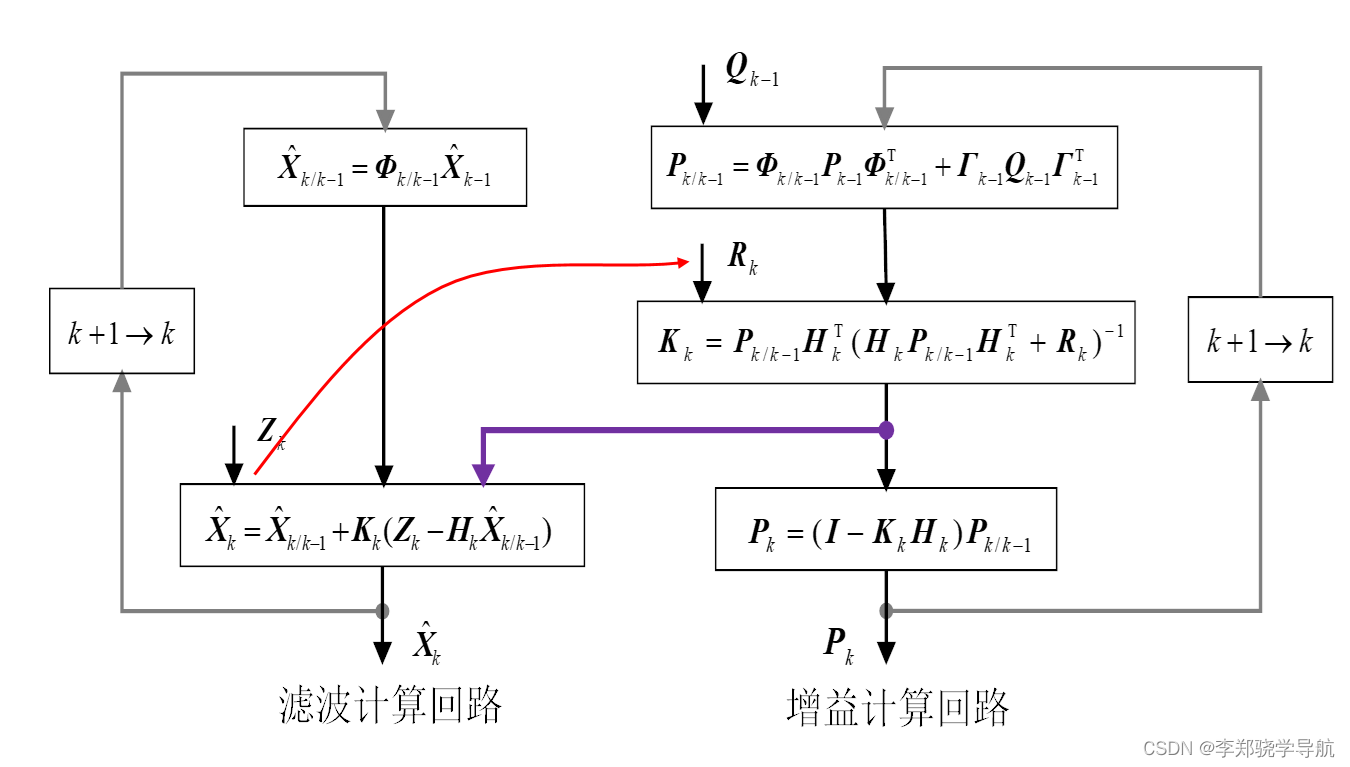
左边的系统对右边有作用,右边对左边也有作用,比较复杂,需要对其做稳定性分析和可控性分析很困难。判断工程上能不能用得做仿真。