文章目录
- 7.3 相关
- 7.5 基图像
- 7.6 傅里叶相关变换
- 7.6.1 离散哈特利变换
- 7.6.3 离散正弦变换
DIP的其他章节都好复习,唯独就这个第7章小波变换。复习起来十分头大,所以我开始写他的课后题,雾。
7.3 相关
已知两个连续函数 f ( x ) f(x) f(x) 和 g ( x ) g(x) g(x), f f f 和 g g g 的相关(当 f ( x ) ≠ g ( x ) f(x)≠g(x) f(x)=g(x) 时,称为互相关;当 f ( x ) = g ( x ) f(x)=g(x) f(x)=g(x) 时,称为自相关)定义为
f ⋆ g ( Δ x ) = ∫ − ∞ ∞ f ∗ ( x ) g ( x + Δ x ) d x = ⟨ f ( x ) , g ( x + Δ x ) ⟩ f \star g(\Delta x)=\int_{-\infty}^{\infty} f^{*}(x) g(x+\Delta x) \mathrm{d} x=\langle f(x), g(x+\Delta x)\rangle f⋆g(Δx)=∫−∞∞f∗(x)g(x+Δx)dx=⟨f(x),g(x+Δx)⟩
相关有时称为 f f f 和 g g g 的滑动内积,度量的是 f ( x ) f(x) f(x) 和 g ( x ) g(x) g(x) 的相似性,是它们相对位移 Δ x Δx Δx 的函数。若 Δ x = 0 Δx=0 Δx=0,则有
f ⋆ g ( 0 ) = ⟨ f ( x ) , g ( x ) ⟩ f \star g(0)=\langle f(x), g(x)\rangle f⋆g(0)=⟨f(x),g(x)⟩
基函数 h h h 的能量,在时间-频率平面上集中于点 ( μ t , μ f ) (μ_t, μ_f) (μt,μf) 处。大部分能量,落在面积为 4 σ t σ f 4σ_tσ_f 4σtσf 的一个矩形区域(称为海森堡盒或单元),
σ t 2 σ f 2 ≥ 1 16 π 2 \sigma_{t}^{2} \sigma_{f}^{2} \geq \frac{1}{16 \pi^{2}} σt2σf2≥16π21
因为函数的支撑集定义为函数非零的点的集合,由海森堡测不准原理知,函数在时间和频率上都存在有限支撑集是不可能的。
7.5 基图像
注意:最大频率的DFT、DHT 基图像,出现在 u = 4 u=4 u=4 和 v = 4 v=4 v=4 时。离散余弦变换、离散正弦变换出现在 u = 7 , v = 7 u=7,v=7 u=7,v=7 时。
7.6 傅里叶相关变换
7.6.1 离散哈特利变换
s ( x , u ) = 1 N cas 2 π u x N = 1 N ( cos 2 π u x N + sin 2 π u x N ) s(x, u)=\frac{1}{\sqrt{N}} \operatorname{cas} \frac{2 \pi u x}{N}=\frac{1}{\sqrt{N}}\left(\cos \frac{2 \pi u x}{N}+\sin \frac{2 \pi u x}{N}\right) s(x,u)=N1casN2πux=N1(cosN2πux+sinN2πux)
7.6.3 离散正弦变换
类似于DCT,DST具有与DFT大致相同的频率范围,但频率分辨率是后者的2倍。注意:与DCT和DFT的不同之处,DST没有直流(u=0)分量。
s ( x , u ) = 2 N + 1 sin ( x + 1 ) ( u + 1 ) π N + 1 s(x, u)=\sqrt{\frac{2}{N+1}} \sin \frac{(x+1)(u+1) \pi}{N+1} s(x,u)=N+12sinN+1(x+1)(u+1)π
close all; clear all; clc;
A = dctmtx(8);
B = A';
C = zeros(8, 8, 64);
m = 0;
for i = 1:8
for j = 1:8
m = m+1;
C(:, :, m) = B(:, i)*A(j, :);
end
end
minvalue = min(min(min(C)));
maxvalue = max(max(max(C)));
figure,
%显示灰度图像的范围,指定为 [low high] 形式的二元素向量。
% imshow 函数将值 low(以及任何小于 low 的值)显示为黑色,并将值 high(以及任何大于 high 的值)显示为白色。
for k = 1:64
subplot(8, 8, k), imshow(C(:, :, k), [minvalue, maxvalue]);
end

对于长度为
N
=
2
J
N=2^J
N=2J 的输入序列, FWT:
O
(
N
)
O(N)
O(N); FFT:
O
(
N
log
2
N
)
O(N\log_2N)
O(Nlog2N)。
为更好地控制时间-频率平面的划分(即得到更小的高频带宽), 必须将 FWT 推广到称为 小波包 的更灵活的分解。这一推广的代价是,计算复杂度:从FWT的 O ( N ) O(N) O(N) 增加到小波包的 O ( N log 2 N ) O(N\log_2N) O(Nlog2N),与FFT相同。
7.35 推导公式(7.140)
d j ( k ) = ∑ n h ψ ( n − 2 k ) c j + 1 ( n ) (7.140) d_{j}(k)=\sum_{n} h_{\psi}(n-2 k) c_{j+1}(n)\tag{7.140} dj(k)=n∑hψ(n−2k)cj+1(n)(7.140)
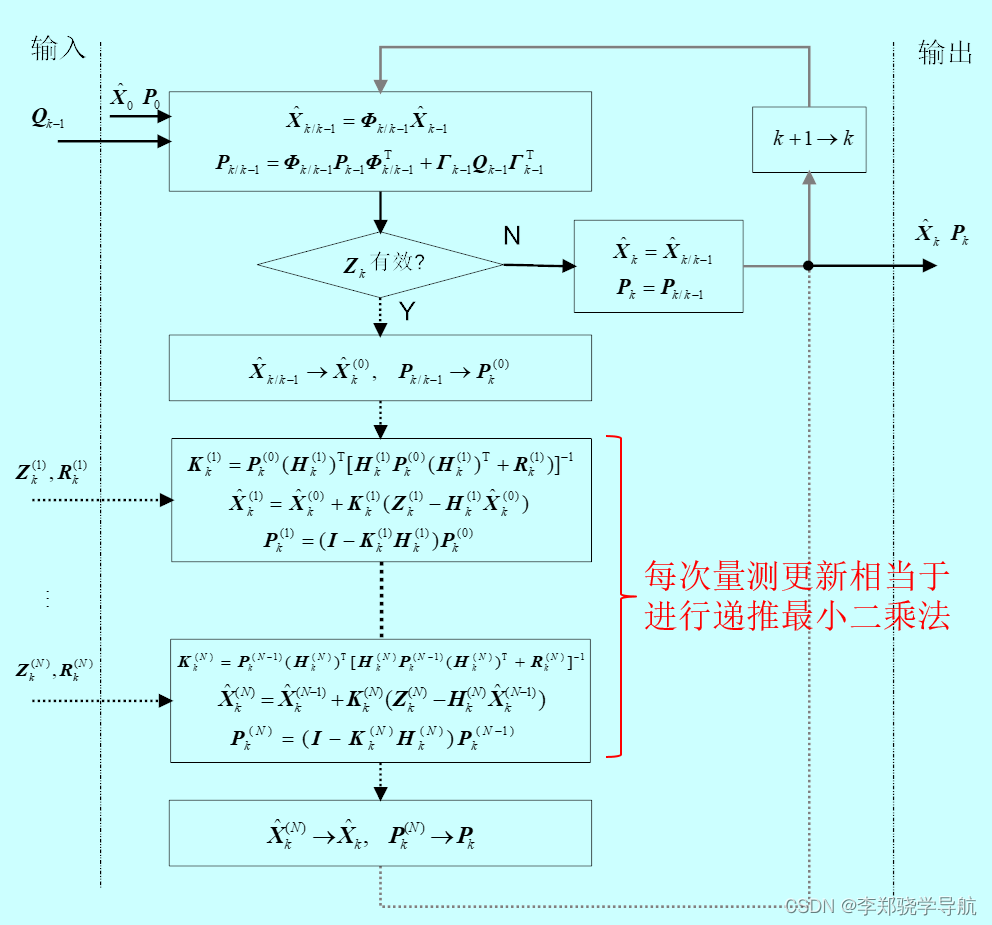
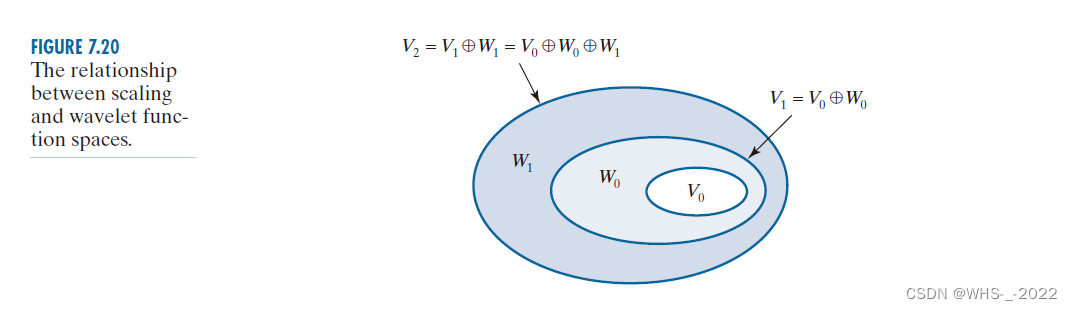
这个公式是快速小波变换中的,大概的含义就是小波空间 W j W_j Wj 中的函数可以由尺度空间 V j + 1 V_{j+1} Vj+1 中的函数来表示。这个是方便理解的,我们可以看书上的这张图。
根据式(7.135)
d
j
=
⟨
f
(
x
)
,
ψ
j
,
k
(
x
)
⟩
(7.135)
d_{j}=\left\langle f(x), \psi_{j, k}(x)\right\rangle\tag{7.135}
dj=⟨f(x),ψj,k(x)⟩(7.135)
我们可以得到:
d j ( k ) = ∫ f ( x ) 2 j / 2 ψ ( 2 j x − k ) d x d_{j}(k)=\int f(x) 2^{j / 2} \psi\left(2^{j} x-k\right) d x dj(k)=∫f(x)2j/2ψ(2jx−k)dx
但是这里我们要推导的是细节系数和尺度系数之间的关系,所以需要将 ψ ( 2 j x − k ) \psi\left(2^{j} x-k\right) ψ(2jx−k) 替换掉。我们观察到(7.130)就是小波函数关于尺度函数加权和的形式,
ψ ( x ) = ∑ k ∈ Z h ψ ( k ) 2 φ ( 2 x − k ) (7.130) \psi(x)=\sum_{k\in\mathbf{Z}} h_{\psi}(k) \sqrt{2} \varphi(2 x-k)\tag{7.130} ψ(x)=k∈Z∑hψ(k)2φ(2x−k)(7.130)
ψ ( 2 j x − k ) = ∑ m h ψ ( m − 2 k ) 2 φ ( 2 j + 1 x − m ) \psi\left(2^{j} x-k\right)=\sum_{m} h_{\psi}(m-2 k) \sqrt{2} \varphi\left(2^{j+1} x-m\right) ψ(2jx−k)=m∑hψ(m−2k)2φ(2j+1x−m)
其中, m ∈ Z m\in Z m∈Z,于是我们可以得到
d j ( k ) = ∫ f ( x ) 2 j / 2 [ ∑ m h ψ ( m − 2 k ) 2 φ ( 2 j + 1 x − m ) ] d x d_{j}(k)=\int f(x) 2^{j / 2}\left[\sum_{m} h_{\psi}(m-2 k) \sqrt{2} \varphi\left(2^{j+1} x-m\right)\right] d x dj(k)=∫f(x)2j/2[m∑hψ(m−2k)2φ(2j+1x−m)]dx
交换积分和求和的次序,可以得到
d j ( k ) = ∑ m h ψ ( m − 2 k ) ∫ f ( x ) 2 ( j + 1 ) / 2 φ ( 2 j + 1 x − m ) d x = ∑ m h ψ ( m − 2 k ) c j + 1 ( m ) \begin{aligned} d_{j}(k)&=\sum_{m} h_{\psi}(m-2 k) \int f(x) 2^{(j+1) / 2} \varphi\left(2^{j+1} x-m\right) d x\\ &=\sum_{m} h_{\psi}(m-2 k) c_{j+1}(m) \end{aligned} dj(k)=m∑hψ(m−2k)∫f(x)2(j+1)/2φ(2j+1x−m)dx=m∑hψ(m−2k)cj+1(m)
clc; clear all; close all;
f=imread('4.一幅512×512的图像.tif');
f=im2double(f);
[cA,cH,cV,cD]=dwt2(f, 'haar');
cA=mat2gray(cA);
cH=mat2gray(cH);
cV=mat2gray(cV);
cD=mat2gray(cD);
w=[cA,cH;cV,cD];
figure; imshow(w);