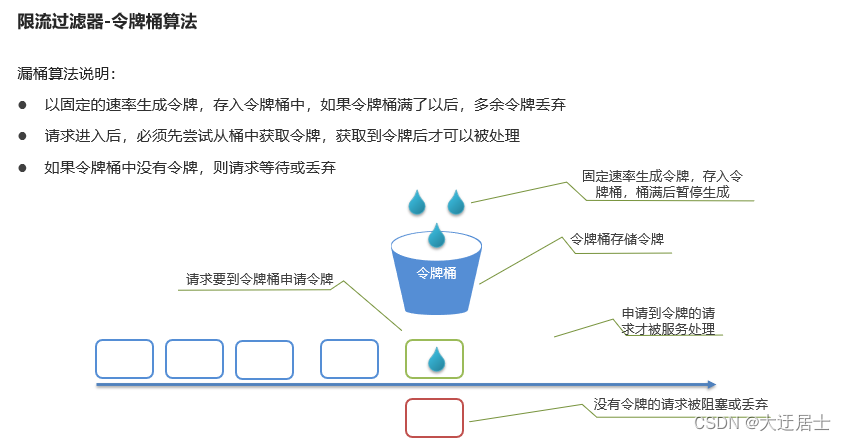
量测维数很高,而且能写成很多分量,每一个分量可以看成一个小量测,可以序贯进行量测更新
- 优点是:计算快,数字稳定性更好,我们知道矩阵求逆是和维数的三次方成正比,分成小矩阵求逆快(都分解成一维的,求逆就变为求导)
- 缺点是:如果量测相关且每一时刻变化,每一时刻要做 Cholesky分解。(其实很多时候量测噪声都是定常数矩阵,只要在启动的时候做一次分解就行)
函数模型
{
X
k
=
Φ
k
/
k
−
1
X
k
−
1
+
Γ
k
−
1
W
k
−
1
Z
k
=
H
k
X
k
+
V
k
\left\{\begin{array}{l} \boldsymbol{X}_{k}=\boldsymbol{\Phi}_{k / k-1} \boldsymbol{X}_{k-1}+\boldsymbol{\Gamma}_{k-1} \boldsymbol{W}_{k-1} \\ \boldsymbol{Z}_{k}=\boldsymbol{H}_{k} \boldsymbol{X}_{k}+\boldsymbol{V}_{k} \end{array}\right.
{Xk=Φk/k−1Xk−1+Γk−1Wk−1Zk=HkXk+Vk
其中
[
Z
k
(
1
)
Z
k
(
2
)
⋮
Z
k
(
N
)
]
=
[
H
k
(
1
)
H
k
(
2
)
⋮
H
k
(
N
)
]
X
k
+
[
V
k
(
1
)
V
k
(
2
)
⋮
V
k
(
N
)
]
R
k
=
[
R
k
(
1
)
R
k
(
2
)
⋱
R
k
(
N
)
]
\begin{array}{l} {\left[\begin{array}{c} \boldsymbol{Z}_{k}^{(1)} \\ \boldsymbol{Z}_{k}^{(2)} \\ \vdots \\ \boldsymbol{Z}_{k}^{(N)} \end{array}\right]=\left[\begin{array}{c} \boldsymbol{H}_{k}^{(1)} \\ \boldsymbol{H}_{k}^{(2)} \\ \vdots \\ \boldsymbol{H}_{k}^{(N)} \end{array}\right] \boldsymbol{X}_{k}+\left[\begin{array}{c} \boldsymbol{V}_{k}^{(1)} \\ \boldsymbol{V}_{k}^{(2)} \\ \vdots \\ \boldsymbol{V}_{k}^{(N)} \end{array}\right]} \\ \boldsymbol{R}_{k}=\left[\begin{array}{cccc} \boldsymbol{R}_{k}^{(1)} & & & \\ & \boldsymbol{R}_{k}^{(2)} & & \\ & & \ddots & \\ & & & \boldsymbol{R}_{k}^{(N)} \end{array}\right] \end{array}
Zk(1)Zk(2)⋮Zk(N)
=
Hk(1)Hk(2)⋮Hk(N)
Xk+
Vk(1)Vk(2)⋮Vk(N)
Rk=
Rk(1)Rk(2)⋱Rk(N)
序贯滤波执行框图:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2muFB9hy-1685974534667)(卡尔曼滤波与组合导航原理(五)序贯滤波.assets/1685973791594.png)]](https://img-blog.csdnimg.cn/8bfcc790b07647528cbbe1fc60312a9f.png)
如果历元间量测噪声相关,量测噪声不是对角阵,它总可以作平方根分解(Cholesky分解)
R
k
=
L
k
L
k
T
\boldsymbol{R}_{k}=\boldsymbol{L}_{k} \boldsymbol{L}_{k}^{\mathrm{T}}
Rk=LkLkT
使用
L
k
−
1
\boldsymbol{L}_{k}^{-1}
Lk−1 同时左乘量测方程两边, 得:
L
k
−
1
Z
k
=
L
k
−
1
H
k
X
k
+
L
k
−
1
V
k
\boldsymbol{L}_{k}^{-1} \boldsymbol{Z}_{k}=\boldsymbol{L}_{k}^{-1} \boldsymbol{H}_{k} \boldsymbol{X}_{k}+\boldsymbol{L}_{k}^{-1} \boldsymbol{V}_{k}
Lk−1Zk=Lk−1HkXk+Lk−1Vk
得到新的量测方程:
Z
k
∗
=
H
k
∗
X
k
+
V
k
∗
\boldsymbol{Z}_{k}^{*}=\boldsymbol{H}_{k}^{*} \boldsymbol{X}_{k}+\boldsymbol{V}_{k}^{*}
Zk∗=Hk∗Xk+Vk∗
其中:
Z
k
∗
=
L
k
−
1
Z
k
,
H
k
∗
=
L
k
−
1
H
k
,
V
k
∗
=
L
k
−
1
V
k
\quad \boldsymbol{Z}_{k}^{*}=\boldsymbol{L}_{k}^{-1} \boldsymbol{Z}_{k}, \quad \boldsymbol{H}_{k}^{*}=\boldsymbol{L}_{k}^{-1} \boldsymbol{H}_{k}, \quad \boldsymbol{V}_{k}^{*}=\boldsymbol{L}_{k}^{-1} \boldsymbol{V}_{k}
Zk∗=Lk−1Zk,Hk∗=Lk−1Hk,Vk∗=Lk−1Vk
从而可以将量测方差阵对角化(单位阵!):
R
k
∗
=
E
[
V
k
∗
(
V
k
∗
)
T
]
=
E
[
(
L
k
−
1
V
k
)
(
L
k
−
1
V
k
)
T
]
=
L
k
−
1
E
[
V
k
V
k
T
]
(
L
k
−
1
)
T
=
L
k
−
1
R
k
(
L
k
−
1
)
T
=
I
\begin{aligned} \boldsymbol{R}_{k}^{*} & =\mathrm{E}\left[\boldsymbol{V}_{k}^{*}\left(\boldsymbol{V}_{k}^{*}\right)^{\mathrm{T}}\right]=\mathrm{E}\left[\left(\boldsymbol{L}_{k}^{-1} \boldsymbol{V}_{k}\right)\left(\boldsymbol{L}_{k}^{-1} \boldsymbol{V}_{k}\right)^{\mathrm{T}}\right] \\ & =\boldsymbol{L}_{k}^{-1} \mathrm{E}\left[\boldsymbol{V}_{k} \boldsymbol{V}_{k}^{\mathrm{T}}\right]\left(\boldsymbol{L}_{k}^{-1}\right)^{\mathrm{T}}=\boldsymbol{L}_{k}^{-1} \boldsymbol{R}_{k}\left(\boldsymbol{L}_{k}^{-1}\right)^{\mathrm{T}}=\boldsymbol{I} \end{aligned}
Rk∗=E[Vk∗(Vk∗)T]=E[(Lk−1Vk)(Lk−1Vk)T]=Lk−1E[VkVkT](Lk−1)T=Lk−1Rk(Lk−1)T=I
满足序贯滤波模型
{
X
k
=
Φ
k
l
k
−
1
X
k
−
1
+
Γ
k
−
1
W
k
−
1
Z
k
∗
=
H
k
∗
X
k
+
V
k
∗
\left\{\begin{array}{l}\boldsymbol{X}_{k}=\boldsymbol{\Phi}_{k l k-1} \boldsymbol{X}_{k-1}+\boldsymbol{\Gamma}_{k-1} \boldsymbol{W}_{k-1} \\ \boldsymbol{Z}_{k}^{*}=\boldsymbol{H}_{k}^{*} \boldsymbol{X}_{k}+\boldsymbol{V}_{k}^{*}\end{array}\right.
{Xk=Φklk−1Xk−1+Γk−1Wk−1Zk∗=Hk∗Xk+Vk∗







![[230603]托福听力精听|TPO66C2|Financial Advice](https://img-blog.csdnimg.cn/da06e31dfa514056bcdedfe9dddf73f4.jpeg)