一、工业相机参数
1、分辨率
分辨率是相机最基本的参数,由相机所采用的芯片分辨率决定,在采集图像时,相机的分辨率对检测精度有很大的影响,在对同样大的视场(景物范围)成像时,分辨率越高,对细节的展示越明显。
- 面阵相机:640x480、1280x960和5472x3648等等;
- 线阵相机:2k(2048*1每次拍摄1行,2048列)、4k\8k\16k等;
2、帧率/行频
- 面阵相机:fps 帧率,每秒采集的最大图片数量;
- 线阵相机:例16kHz 行频,每秒采集的最大行数,最大图像分辨率为分辨率*行频(例2048x16k);
3、像元尺寸
像元尺寸是指一个像素的实际物理大小,从某种程度上反映了芯片的对光的响应能力,一般情况下,像元尺寸越大,能够接收到的光子数量越多,在同样的光照条件和曝光时间内产生的电荷数量越多。
像元尺寸和像元数(分辨率)共同决定了相机靶面的大小,通常工业相机像元尺寸为2μm~14μm。
4、曝光时间
曝光时间是为了将光投射到照相感光材料的感光面上,快门所要打开的时间。曝光时间和实际的帧率成反比,也就是曝光时间越长,实际的采集帧率会越低,一般为3um-10ms。
5、动态范围
动态范围是用来描述每个像素能够分辨出的灰度等级,宽动态范围能够使场景中亮场和暗场部分的细节同时被清晰的记录下来。动态范围值越大,意味着工业相机可以拍摄物体明暗程度的范围越宽。常见的值为50-80db。
6、靶面尺寸(传感器尺寸)
靶面尺寸:1/n",这里指的是传感器(工作区域为矩形)对角线长度为1/n英寸,但这里英寸和mm的换算关系并不是1英寸=25.4mm,而是=16mm。下面列举了一些常用的靶面尺寸:
- 1.1" 英寸——靶面尺寸为 宽12 mm * 高12 mm ,对角线17 mm;
- 1" 英寸——靶面尺寸为 宽12.7 mm * 高9.6 mm ,对角线16 mm;
- 2/3" 英寸——靶面尺寸为 宽8.8 mm * 高6.6 mm ,对角线11 mm;
- 1/1.8"英寸——靶面尺寸为 宽7.2 mm * 高5.4 mm ,对角线 9 mm;
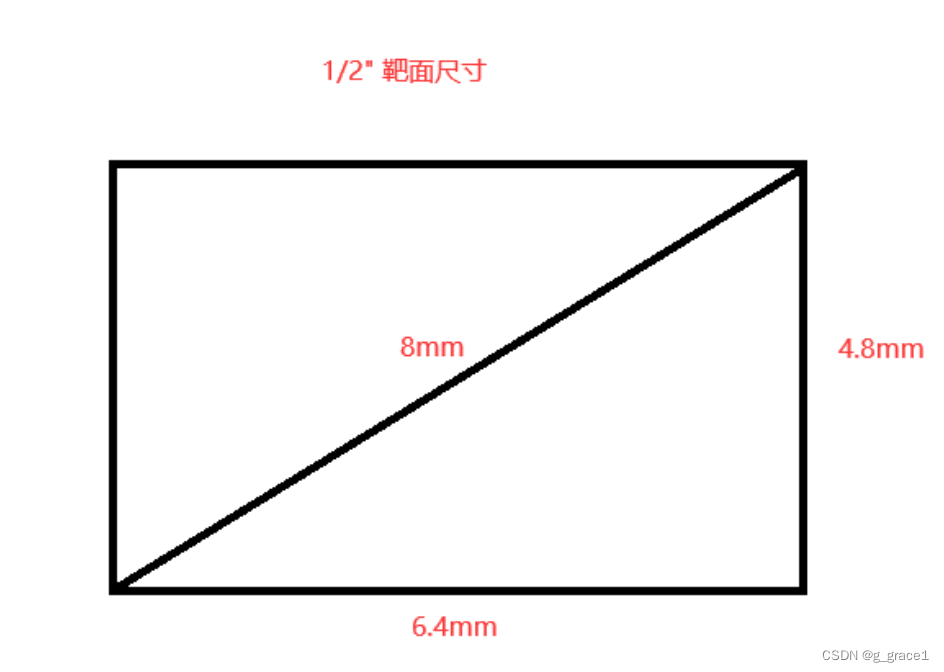
- 1/2" 英寸——靶面尺寸为 宽6.4 mm * 高4.8 mm ,对角线 8 mm;
- 1/3" 英寸——靶面尺寸为 宽4.8 mm * 高3.6 mm ,对角线 6 mm;
- 1/4" 英寸——靶面尺寸为 宽3.2 mm * 高2.4 mm ,对角线 4 mm;
下面是1/2’'英寸的靶面尺寸示意图:
7、像素深度
像素深度是指每位像素数据的位数,通常用多少比特位表示。一般,每个像素的比特位数多,表达图像细节的能力强,这个像素的灰阶值更加丰富、分得更细,像素的灰阶深度就更深,但同时数据量也越大,影响系统的图像处理速度,因此也需慎重选择。
常见的是8bit、10bit、12bit。分辨率和像素深度共同决定了图像的大小。
二、工业相机分类
1、按照图像颜色分类
图像颜色不同可以分为黑白相机和彩色相机:相同分辨率下,黑白工业相机相比彩色工业相机精度更高,检测图像边缘时,黑白工业相机成像效果更好。如果需要处理项目与图像颜色有关,彩色工业相机效果更佳。
2、按照芯片类型分类
芯片类型不同可以分为CCD相机和CMOS相机:CCD工业相机具有体积小重量轻、低功耗、响应速度快、像素集成度高等优势,CMOS工业相机具有高速成像、高帧率、高性价比等优势。
3、按照传感器的结构特性分类
- 面阵相机
面阵相机是一种可以一次性的获取图像并能及时进行图像采集的相机。应用范围比较广,例如面积、形状、尺寸、位置,甚至温度等测量,这种相机可以快速准确的获取二维图像信息,而且具有非常直观的测量图像。适用于静态拍摄。
优点:直接获取二维图像信息,测量图像直观。方案简单,容易实现。应用面较广。
缺点:像元总数多,帧率相对线阵低很多。。
- 线阵相机
线阵相机是采用线阵图像传感器的相机。呈现出线状,虽然也是二维图像,但是很长,适用于动态拍摄,通常只在两种情况下使用这种相机:一、被测视野为细长的带状,多用于滚筒上检测的问题。二、需要极大的视野或极高的精度。特殊的工业相机,只有一行感光元素,因此可以用高速扫描和高分辨率,应用于连续检测的领域,比如金属,塑料,纸和纤维等,被测物体匀速运动,可以对图片一行一行处理,或者组成多张进行处理。
三、工业相机选型
- 线扫选型方法
a、计算分辨率:幅宽/最小检测精度=每行所需要的像素;
b、确定像素精度:幅宽/像素数=像素精度;
c、确定行频:每秒运动速度/像素精度=理想行频;
d、根据分辨率与行频,选定相机
例子:幅宽1800mm,精度1mm,运动速度25000mm/s,选择合适的相机。
分辨率:1800/1=1800,选择2k相机;
像素精度:1800/2048(2k)=0.9;
行频:25000/0.9=27.8kHz;
因此,可以选择行频大于28kHz的2k线扫相机; - 面阵选型方法