此笔记针对 Python 版本的 opencv3,c++ 版本的函数和 python 版本的函数参数几乎一样,只是矩阵格式从 ndarray 类型变成适合 c++ 的 mat 模板类型。注意,因为 python 版本的opncv只提供接口没有实现,故函数原型还是来自 c++版本的opencv,但是参数解释中的数据类型还是和 python 保持一致。
图像的载入:imread() 函数
函数原型:
Mat imread(const sting& filename, int flags=None)
参数解释:
filename:图像的文件路径,sting字符串类型flags:载入标识,以何种方式读取图片,int类型的flags。常用取值解释如下:flags = 0:始终将图像转成灰度图再返回flags = 1:始终将图像转换成彩色图再返回,如果读取的是灰度图,则其返回的矩阵shape将变为(height, width, 3)flags = 2:如果载入的图像深度为16位或者32位,就返回对应深度的图像,否则,就转换为8位图像再返回。
**总结:**读取文件中的图片到 OpenCV 中,返回 Mat 或者 ndarray 类型的矩阵,以彩色模式载入图像时,解码后的图像会默认以 BGR 的通道顺序进行存储。
cv2.imread()函数:
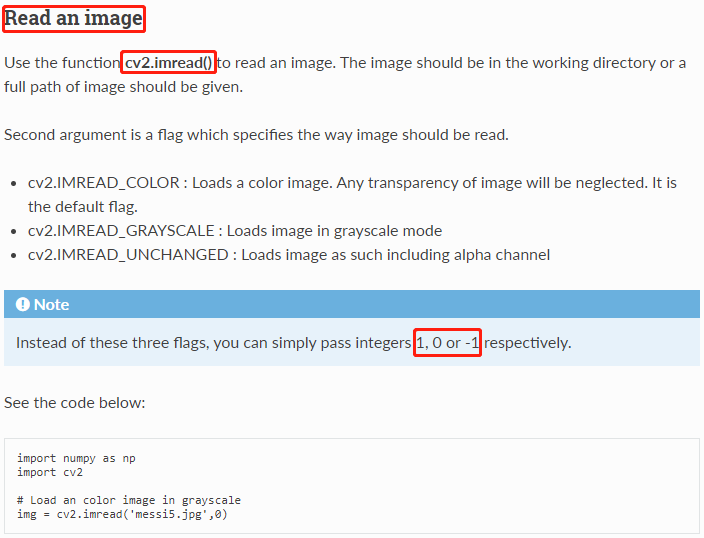
python-opencv 库的 imread 函数的 flags 参数取值方式与 C++ 版有所区别。使用函数 cv2.imread() 读入图像,图像要么在此程序的工作路径,要么函数参数指定了完整路径,第二个参数是要告诉函数应该如何读取这幅图片,取值如下:
cv2.IMREAD_COLOR: 取值1,读入一副彩色图像。图像的透明度会被忽略,这是默认参数。cv2.IMREAD_GRAYSCALE: 取值0,以灰度模式读入图像。cv2.IMREAD_UNCHANGED: 取值-1,读入一幅图像,并且包括图像的 alpha 通道。
Instead of these three flags, you can simply pass integers 1, 0 or -1 respectively.
import numpy as np
import cv2
# Load an color image in grayscale
img = cv2.imread('messi5.jpg',0)
opencv-python 库的读取图像函数 cv2.imread() 官方定义如下图。
图像的显示:imshow()函数
函数原型:
void imshow(const string &winname, InputArray mat)
参数解释:
winname:需要显示的窗口标识名称,string字符串类型mat:需要显示的图像矩阵,ndarraynumpy 矩阵类型
总结:imshow 函数用于在指定的窗口显示图像,窗口会自动调整为图像大小。
minMaxLoc 函数
函数 cv :: minMaxLoc 查找最小和最大元素值及其位置,返回的位置坐标是先列号,后行号(列号,行号) 。在整个数组中搜索极值,或者如果mask不是空数组,则在指定的数组区域中搜索极值。(只适合单通道矩阵)。函数原型:
CV_EXPORTS_W void minMaxLoc(InputArray src, CV_OUT double* minVal,
CV_OUT double* maxVal = 0, CV_OUT Point* minLoc = 0,
CV_OUT Point* maxLoc = 0, InputArray mask = noArray());
函数参数解释:
src:input single-channel array.minVal:pointer to the returned minimum value; NULL is used if not required.maxVal:pointer to the returned maximum value; NULL is used if not required.minLoc:pointer to the returned minimum location (in 2D case); NULL is used if not required.maxLoc:pointer to the returned maximum location (in 2D case); NULL is used if not required.
位深度的概念
- 灰度图的位深度是
16,则其矩阵的元素类型为uint16,彩色图其位深度一般是24,红色占8个位、蓝色占8个位、绿色占8个位,其矩阵的元素类型为uint8。 - 位分辨率(
Bit Resolution)又称色彩深度、色深或位深度,在位图图像或视频视频缓冲区,指一个像素中,每个颜色分量(Red、Green、Blue、Alpha通道)的比特数。 matplotlib.image.imsave将灰度图的矩阵保存为图像格式时,其默认保存的图像通道数为4:RGBA,其中RGB三个通道对应的二维矩阵数值完全一样。