目录
硬件
模拟输入范围
转换速度与有效位数
数字电平匹配
建立时间
基准电压
软件
寄存器
硬件
MCU 3.3V 平台;
ADC mclk 2.4576mhz
模拟输入范围
在非缓冲模式下,共模输入范围是从
GND
到
V
DD
。模拟输入电压的绝对值处在
GND-30mV
和
V
DD
+30mV
之间。
在缓冲模式下,模拟输入端能处理更大的电
源阻抗,但绝对输入电压范围被限制在
GND+50 mV
到
V
DD
+30mV
之间。
转换速度与有效位数
3.3V
约13位有效位数@500Hz
5.0V
13位有效位数@500Hz

数字电平匹配
这里主要看MCU3.3V,ADC5V情况的适配情况
MCLK如果是外部提供一定要注意电平
3.3V端接受5V端电平,可以接个分压电阻。

5V端接受3.3V电平,可以直连。

建立时间
这里主要讲2个通道切换时,需要建立的时间。
在TM7707的数据手册上我并没有直接找到直接描述建立时间。下面是在ADI的一篇文档中的描写
01 (analog.com)

简单理解成切换通道需要的建立时间是3个转换周期吧。
基准电压

软件
寄存器
这里重点讲下面这个寄存器,在看到这个手册时,我以为TM7707没有时钟分频,外部时钟最大2.
5mhz.FS111~8 也没有介绍真奇怪。
但是在一些帖子上看到别人使用TM7707 这部分的配置按照TM7705可以正常工作,我又找到了AD7707,结合网友的实测,应该可以得出一些结论了。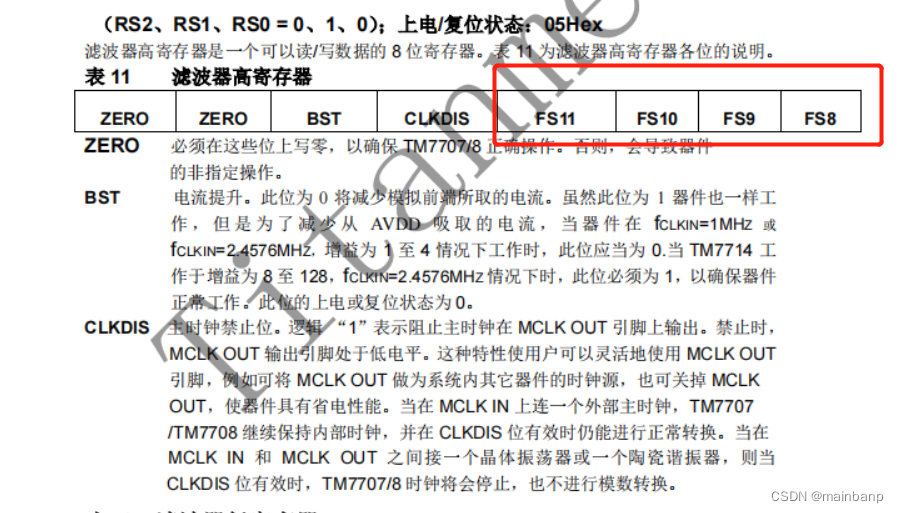
TM7707
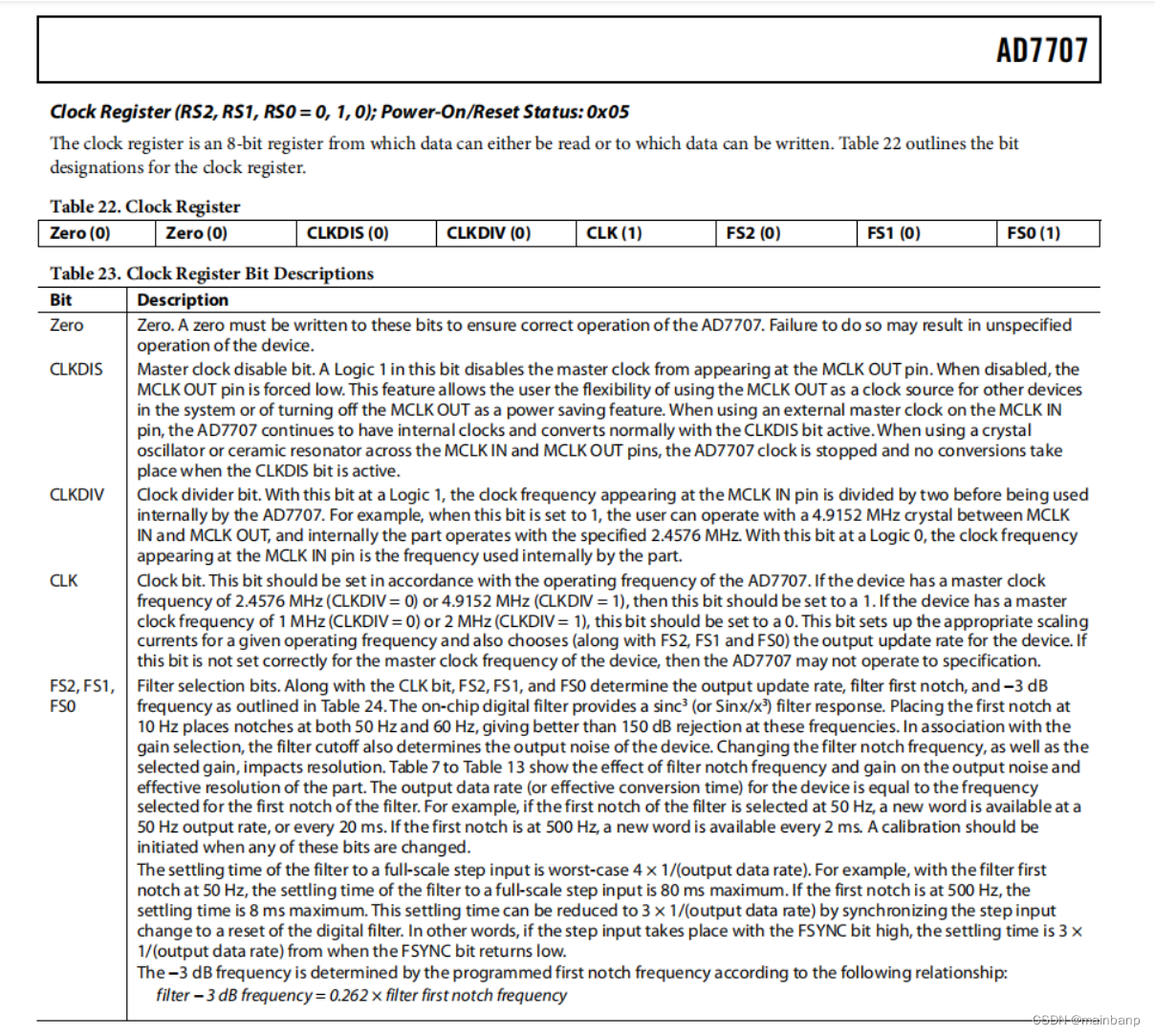
AD7707
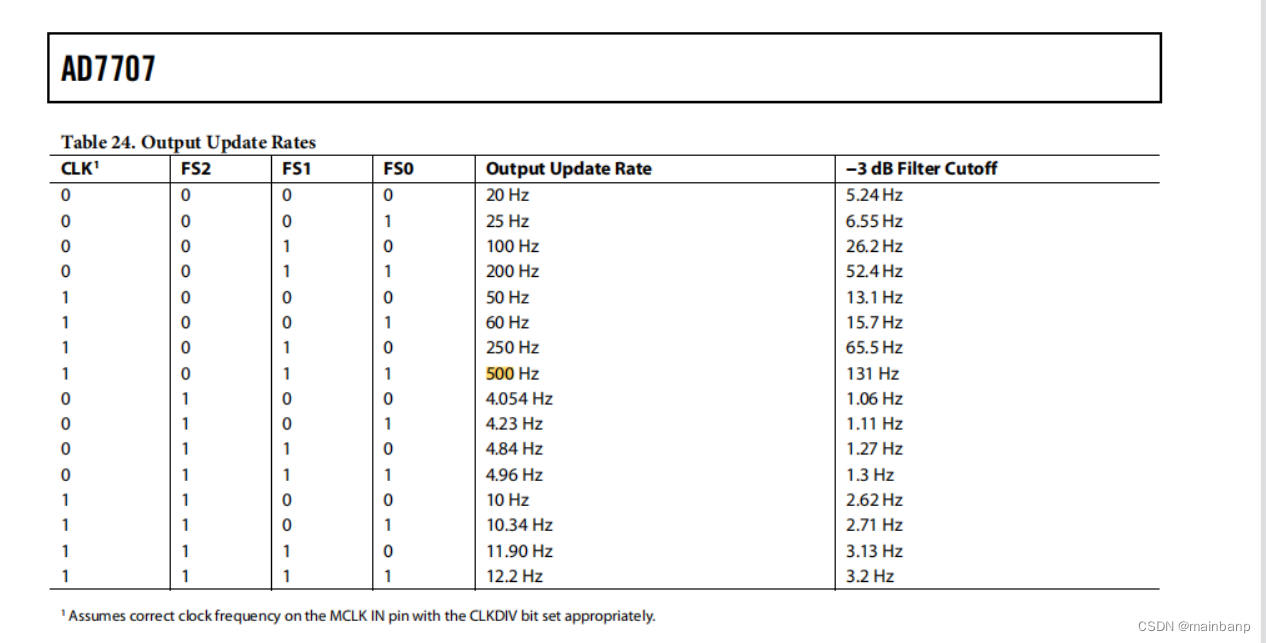
安富莱的驱动代码(这里需要注意FS_500HZ = 0x04, 是错误的按照数据手册 正确的是FS_500HZ = 0x03)
tm7705.h
#ifndef __TM7705_H
#define __TM7705_H
#include "main.h"
#define TM_CS_H HAL_GPIO_WritePin(GPIOG,GPIO_PIN_7,1);
#define TM_CS_L HAL_GPIO_WritePin(GPIOG,GPIO_PIN_7,0);
#define TM_RST_H HAL_GPIO_WritePin(GPIOG,GPIO_PIN_6,1);
#define TM_RST_L HAL_GPIO_WritePin(GPIOG,GPIO_PIN_6,0);
void InitTM7705(void);
void TM7705_CalibSelf(uint8_t _ch);
void TM7705_SytemCalibZero(uint8_t _ch);
void TM7705_SytemCalibFull(uint8_t _ch);
uint16_t TM7705_ReadAdc(uint8_t _ch);
#endif
tm7705.c
#include "tm7705.h"
#include "main.h"
/***********************以下为TM7705的标准库*****************************/
/************************************************************************/
/* 通道1和通道2的增益,输入缓冲,极性 */
#define __CH1_GAIN_BIPOLAR_BUF (GAIN_1 | UNIPOLAR | BUF_NO)
#define __CH2_GAIN_BIPOLAR_BUF (GAIN_1 | UNIPOLAR | BUF_NO)
/*
TM7705模块可以直接插到STM32-V5开发板nRF24L01模块的排母接口上。
TM7705模块 STM32F407开发板
SCK ------ PB3/SPI3_SCK
DOUT ------ PB4/SPI3_MISO
DIN ------ PB5/SPI3_MOSI
CS ------ PF7/NRF24L01_CSN
DRDY ------ PH7/NRF24L01_IRQ
RST ------ PA4/NRF905_TX_EN/NRF24L01_CE/DAC1_OUT (复位 RESET)
*/
/* 通信寄存器bit定义 */
enum
{
/* 寄存器选择 RS2 RS1 RS0 */
REG_COMM = 0x00, /* 通信寄存器 */
REG_SETUP = 0x10, /* 设置寄存器 */
REG_CLOCK = 0x20, /* 时钟寄存器 */
REG_DATA = 0x30, /* 数据寄存器 */
REG_ZERO_CH1 = 0x60, /* CH1 偏移寄存器 */
REG_FULL_CH1 = 0x70, /* CH1 满量程寄存器 */
REG_ZERO_CH2 = 0x61, /* CH2 偏移寄存器 */
REG_FULL_CH2 = 0x71, /* CH2 满量程寄存器 */
/* 读写操作 */
WRITE = 0x00, /* 写操作 */
READ = 0x08, /* 读操作 */
/* 通道 */
CH_1 = 0, /* AIN1+ AIN1- */
CH_2 = 1, /* AIN2+ AIN2- */
CH_3 = 2, /* AIN1- AIN1- */
CH_4 = 3 /* AIN1- AIN2- */
};
/* 设置寄存器bit定义 */
enum
{
MD_NORMAL = (0 << 6), /* 正常模式 */
MD_CAL_SELF = (1 << 6), /* 自校准模式 */
MD_CAL_ZERO = (2 << 6), /* 校准0刻度模式 */
MD_CAL_FULL = (3 << 6), /* 校准满刻度模式 */
GAIN_1 = (0 << 3), /* 增益 */
GAIN_2 = (1 << 3), /* 增益 */
GAIN_4 = (2 << 3), /* 增益 */
GAIN_8 = (3 << 3), /* 增益 */
GAIN_16 = (4 << 3), /* 增益 */
GAIN_32 = (5 << 3), /* 增益 */
GAIN_64 = (6 << 3), /* 增益 */
GAIN_128 = (7 << 3), /* 增益 */
/* 无论双极性还是单极性都不改变任何输入信号的状态,它只改变输出数据的代码和转换函数上的校准点 */
BIPOLAR = (0 << 2), /* 双极性输入 */
UNIPOLAR = (1 << 2), /* 单极性输入 */
BUF_NO = (0 << 1), /* 输入无缓冲(内部缓冲器不启用) */
BUF_EN = (1 << 1), /* 输入有缓冲 (启用内部缓冲器) */
FSYNC_0 = 0,
FSYNC_1 = 1 /* 不启用 */
};
/* 时钟寄存器bit定义 */
enum
{
CLKDIS_0 = 0x00, /* 时钟输出使能 (当外接晶振时,必须使能才能振荡) */
CLKDIS_1 = 0x10, /* 时钟禁止 (当外部提供时钟时,设置该位可以禁止MCK_OUT引脚输出时钟以省电 */
/*
2.4576MHz(CLKDIV=0 )或为 4.9152MHz (CLKDIV=1 ),CLK 应置 “0”。
1MHz (CLKDIV=0 )或 2MHz (CLKDIV=1 ),CLK 该位应置 “1”
*/
CLK_4_9152M = 0x08,
CLK_2_4576M = 0x00,
CLK_1M = 0x04,
CLK_2M = 0x0C,
FS_50HZ = 0x00,
FS_60HZ = 0x01,
FS_250HZ = 0x02,
FS_500HZ = 0x03,
/*
四十九、电子秤应用中提高TM7705 精度的方法
当使用主时钟为 2.4576MHz 时,强烈建议将时钟寄存器设为 84H,此时数据输出更新率为10Hz,即每0.1S 输出一个新数据。
当使用主时钟为 1MHz 时,强烈建议将时钟寄存器设为80H, 此时数据输出更新率为4Hz, 即每0.25S 输出一个新数据
*/
ZERO_0 = 0x00,
ZERO_1 = 0x80
};
static void TM7705_SyncSPI(void);
static void TM7705_WriteByte(uint8_t _data);
static void TM7705_Write3Byte(uint32_t _data);
static uint8_t TM7705_ReadByte(void);
static uint16_t TM7705_Read2Byte(void);
static uint32_t TM7705_Read3Byte(void);
static void TM7705_WaitDRDY(void);
static void TM7705_ResetHard(void);
static void TM7705_Delay(void);
//SPIx 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
uint8_t SPI1_ReadWriteByte(uint8_t TxData)
{
uint8_t Rxdata;
while(HAL_SPI_TransmitReceive(&hspi2,&TxData,&Rxdata,1, 1000)!=HAL_OK)
{
HAL_Delay(1);
}
return Rxdata;
}
//写入1个字节。带CS控制
static void TM7705_WriteByte(uint8_t _data)
{
TM_CS_L;
SPI1_ReadWriteByte(_data);
TM_CS_H;
}
/***********************以下为TM7705的移植函数***************************/
/************************************************************************/
void InitTM7705(void)
{
int k=0;
TM7705_ResetHard();//rest
TM7705_WriteByte(REG_CLOCK | WRITE | CH_1); /* 先写通信寄存器,下一步是写时钟寄存器 */
TM7705_WriteByte(CLKDIS_0 | CLK_4_9152M | FS_50HZ); /* 刷新速率50Hz */
}
//硬件复位TM7705
static void TM7705_ResetHard(void)
{
TM_RST_H;
HAL_Delay(1);
TM_RST_L;
HAL_Delay(2);
TM_RST_H;
HAL_Delay(1);
}
//同步TM7705芯片SPI接口时序
static void TM7705_SyncSPI(void)
{
/* AD7705串行接口失步后将其复位。复位后要延时500us再访问 */
TM_CS_L;
SPI1_ReadWriteByte(0xFF);
SPI1_ReadWriteByte(0xFF);
SPI1_ReadWriteByte(0xFF);
SPI1_ReadWriteByte(0xFF);
TM_CS_H;
}
//写入3个字节。带CS控制
static void TM7705_Write3Byte(uint32_t _data)
{
TM_CS_L;
SPI1_ReadWriteByte((_data >> 16) & 0xFF);
SPI1_ReadWriteByte((_data >> 8) & 0xFF);
SPI1_ReadWriteByte(_data);
TM_CS_H;
}
//从AD芯片读取一个字(16位)
static uint8_t TM7705_ReadByte(void)
{
uint8_t read;
TM_CS_L;
read = SPI1_ReadWriteByte(0xff);
TM_CS_H;
return read;
}
//读2字节数据
static uint16_t TM7705_Read2Byte(void)
{
uint16_t read=0;
TM_CS_L;
read = SPI1_ReadWriteByte(0xff);
read <<= 8;
read += SPI1_ReadWriteByte(0xff);
TM_CS_H;
return read;
}
//读3字节数据
static uint32_t TM7705_Read3Byte(void)
{
uint32_t read;
// CS_0();
// read = TM7705_Recive8Bit();
// read <<= 8;
// read += TM7705_Recive8Bit();
// read <<= 8;
// read += TM7705_Recive8Bit();
// CS_1();
return read;
}
//等待内部操作完成。 自校准时间较长,需要等待。
static void TM7705_WaitDRDY(void)
{
uint32_t i;
for (i = 0; i < 1000; i++)
{
HAL_Delay(1);
if (0==HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_8))
{
break;
}
}
if (i >= 1000)
{
printf("TM7705_WaitDRDY() Time Out ...\r\n"); /* 调试语句. 用语排错 */
}
}
//写指定的寄存器,_RegID : 寄存器ID,寄存器值。 对于8位的寄存器,取32位形参的低8bit
void TM7705_WriteReg(uint8_t _RegID, uint32_t _RegValue)
{
uint8_t bits;
switch (_RegID)
{
case REG_COMM: /* 通信寄存器 */
case REG_SETUP: /* 设置寄存器 8bit */
case REG_CLOCK: /* 时钟寄存器 8bit */
bits = 8;
break;
case REG_ZERO_CH1: /* CH1 偏移寄存器 24bit */
case REG_FULL_CH1: /* CH1 满量程寄存器 24bit */
case REG_ZERO_CH2: /* CH2 偏移寄存器 24bit */
case REG_FULL_CH2: /* CH2 满量程寄存器 24bit*/
bits = 24;
break;
case REG_DATA: /* 数据寄存器 16bit */
default:
return;
}
TM7705_WriteByte(_RegID | WRITE); /* 写通信寄存器, 指定下一步是写操作,并指定写哪个寄存器 */
if (bits == 8)
{
TM7705_WriteByte((uint8_t)_RegValue);
}
else /* 24bit */
{
TM7705_Write3Byte(_RegValue);
}
}
//读指定的寄存器,_RegID : 寄存器ID,寄存器值。 对于8位的寄存器,取32位形参的低8bit
uint32_t TM7705_ReadReg(uint8_t _RegID)
{
uint8_t bits;
uint32_t read;
switch (_RegID)
{
case REG_COMM: /* 通信寄存器 */
case REG_SETUP: /* 设置寄存器 8bit */
case REG_CLOCK: /* 时钟寄存器 8bit */
bits = 8;
break;
case REG_ZERO_CH1: /* CH1 偏移寄存器 24bit */
case REG_FULL_CH1: /* CH1 满量程寄存器 24bit */
case REG_ZERO_CH2: /* CH2 偏移寄存器 24bit */
case REG_FULL_CH2: /* CH2 满量程寄存器 24bit*/
bits = 24;
break;
case REG_DATA: /* 数据寄存器 16bit */
default:
return 0xFFFFFFFF;
}
TM7705_WriteByte(_RegID | READ); /* 读通信寄存器, 指定下一步是读操作,并指定写哪个寄存器 */
if (bits == 16)
{
read = TM7705_Read2Byte();
}
else if (bits == 8)
{
read = TM7705_ReadByte();
}
else /* 24bit */
{
read = TM7705_Read3Byte();
}
return read;
}
//启动自校准. 内部自动短接AIN+ AIN-校准0位,内部短接到Vref 校准满位。此函数执行过程较长,实测约 180ms
void TM7705_CalibSelf(uint8_t _ch)
{
if (_ch == 1)
{
/* 自校准CH1 */
TM7705_WriteByte(REG_SETUP | WRITE | CH_1); /* 写通信寄存器,下一步是写设置寄存器,通道1 */
TM7705_WriteByte(MD_CAL_SELF | __CH1_GAIN_BIPOLAR_BUF | FSYNC_0);/* 启动自校准 */
TM7705_WaitDRDY(); /* 等待内部操作完成 --- 时间较长,约180ms */
}
else if (_ch == 2)
{
/* 自校准CH2 */
TM7705_WriteByte(REG_SETUP | WRITE | CH_2); /* 写通信寄存器,下一步是写设置寄存器,通道2 */
TM7705_WriteByte(MD_CAL_SELF | __CH2_GAIN_BIPOLAR_BUF | FSYNC_0); /* 启动自校准 */
TM7705_WaitDRDY(); /* 等待内部操作完成 --- 时间较长,约180ms */
}
}
//启动系统校准零位. 请将AIN+ AIN-短接后,执行该函数。校准应该由主程序控制并保存校准参数。
void TM7705_SytemCalibZero(uint8_t _ch)
{
if (_ch == 1)
{
TM7705_WaitDRDY(); /* 等待内部操作完成 */
/* 校准CH1 */
TM7705_WriteByte(REG_SETUP | WRITE | CH_1); /* 写通信寄存器,下一步是写设置寄存器,通道1 */
TM7705_WriteByte(MD_CAL_ZERO | __CH1_GAIN_BIPOLAR_BUF | FSYNC_0);/* 启动自校准 */
}
else if (_ch == 2)
{
TM7705_WaitDRDY(); /* 等待内部操作完成 */
/* 校准CH2 */
TM7705_WriteByte(REG_SETUP | WRITE | CH_2); /* 写通信寄存器,下一步是写设置寄存器,通道1 */
TM7705_WriteByte(MD_CAL_ZERO | __CH2_GAIN_BIPOLAR_BUF | FSYNC_0); /* 启动自校准 */
}
}
//启动系统校准满位. 请将AIN+ AIN-接最大输入电压源,执行该函数。校准应该由主程序控制并保存校准参数
//执行完毕后。可以通过 TM7705_ReadReg(REG_FULL_CH1) 和 TM7705_ReadReg(REG_FULL_CH2) 读取校准参数。
void TM7705_SytemCalibFull(uint8_t _ch)
{
if (_ch == 1)
{
TM7705_WaitDRDY(); /* 等待内部操作完成 */
/* 校准CH1 */
TM7705_WriteByte(REG_SETUP | WRITE | CH_1); /* 写通信寄存器,下一步是写设置寄存器,通道1 */
TM7705_WriteByte(MD_CAL_FULL | __CH1_GAIN_BIPOLAR_BUF | FSYNC_0);/* 启动自校准 */
}
else if (_ch == 2)
{
TM7705_WaitDRDY(); /* 等待内部操作完成 */
/* 校准CH2 */
TM7705_WriteByte(REG_SETUP | WRITE | CH_2); /* 写通信寄存器,下一步是写设置寄存器,通道1 */
TM7705_WriteByte(MD_CAL_FULL | __CH2_GAIN_BIPOLAR_BUF | FSYNC_0); /* 启动自校准 */
}
}
//读通道1或2的ADC数据
uint16_t TM7705_ReadAdc(uint8_t _ch)
{
uint16_t read = 0,i=0;
/* 为了避免通道切换造成读数失效,读2次 */
for(i=0;i<2;i++)
{
if (_ch == 1)
{
TM7705_WaitDRDY(); /* 等待DRDY口线为0 */
TM7705_WriteByte(0x38);
read = TM7705_Read2Byte();
}
else if (_ch == 2)
{
TM7705_WaitDRDY();
TM7705_WriteByte(0x39);
read = TM7705_Read2Byte();
}
}
return read;
}
//CLK之间的延迟,时序延迟. 用于STM32F407 168M主频 改为STM32F103ZET6主频变为72M延时数相应减少
static void TM7705_Delay(void)
{
uint16_t i;
for (i = 0; i < 3; i++);
}main.c
InitTM7705(); //FS_50HZ
TM7705_CalibSelf(1); /* 自校准。执行时间较长,约180ms */
adc1 = TM7705_ReadAdc(1);
TM7705_CalibSelf(2); /* 自校准。执行时间较长,约180ms */
adc2 = TM7705_ReadAdc(2);
printf("初始化TM7705 OK! adc1=%d adc2=%d\r\n",adc1,adc2);
while (1)
{
/* 双通道切换采样,执行一轮实际那约 160ms */
adc1 = TM7705_ReadAdc(1); /* 执行时间 80ms */
adc2 = TM7705_ReadAdc(2); /* 执行时间 80ms */
}