高精地图(HD Maps):支持其他模块
定位(Localization):讨论汽车如何确定他所处的位置,汽车利用激光和雷达数据,将这些传感器感知内容与高分辨地图进行对比,这种对比使得汽车能够以个位数厘米级精度进行定位。
感知(perception):汽车如何感知世界,深度学习是一个重要且强有力的感知工具,卷积神经网络构成深度学习分支,对感知任务至关重要,如分类,检测和分割
这几种方法适用于几种不同无人驾驶车传感器的数据来源,包括摄像头,雷达和激光雷达

预测(prediction):预测其他车辆和行人如何移动。一种方法是递归式神经网络,可对其他物体随时间的运动进行移动,并使用时间序列预测未来

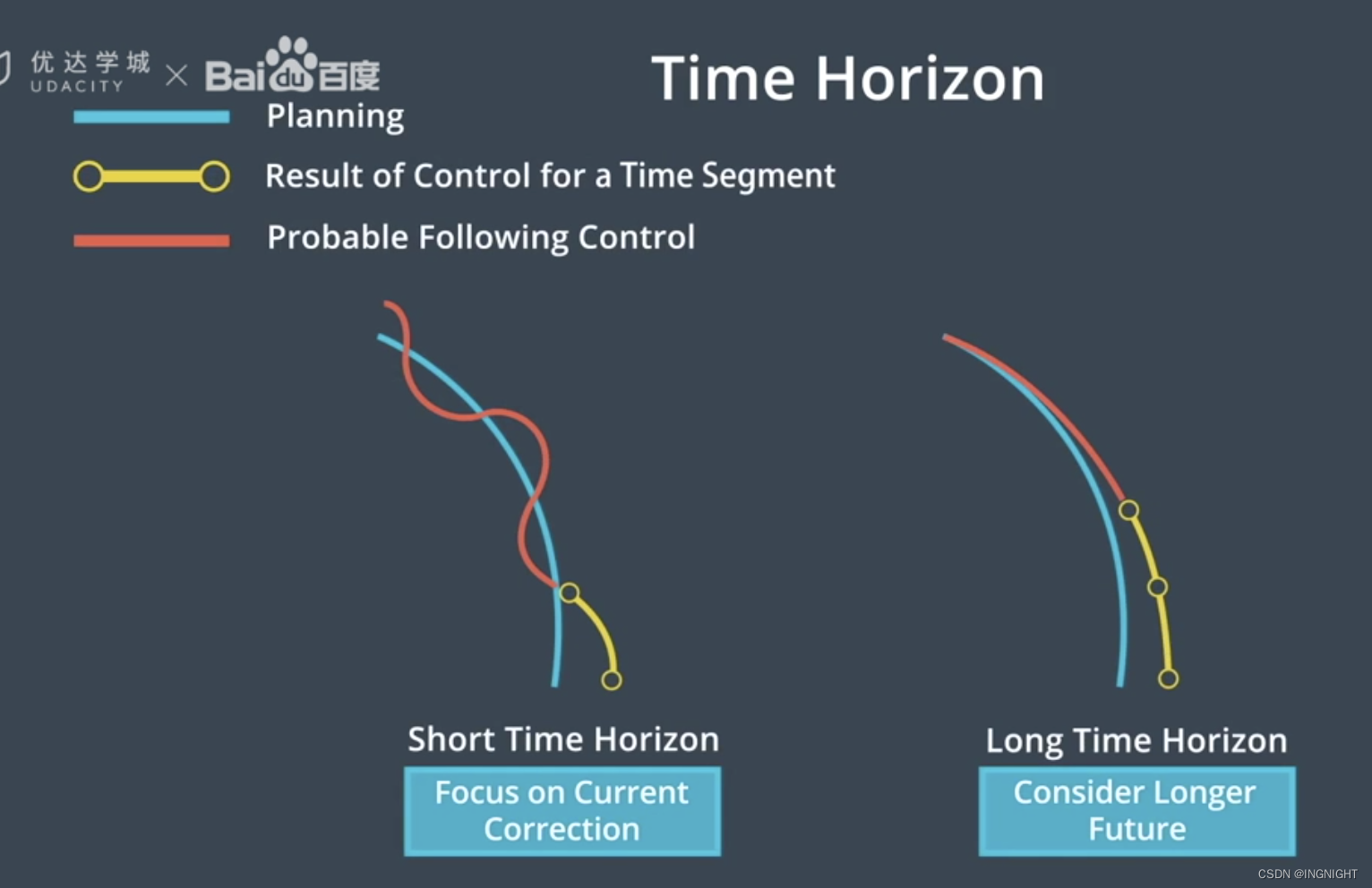
规划(planing):将预测和路线相结合以生成车辆轨迹,规划是构建无人驾驶车最困难部分之一

控制(control):如何使用转向,油门和制动来执行规划轨迹







0 Level:是基本等级,驾驶员是系统的唯一据测者。驾驶员控制方向盘、油门和制动器和所有其他车辆控制装置
1 Level:驾驶员辅助,车辆为驾驶员提供转向和加速支持,例如巡航控制。驾驶员必须充分参与,但可以放弃一些自制系统的控制
2 Level:部分自动化 ,车辆自动控制几项功能,如自动巡航控制和车道保持
3 Level:有条件的自动化
4 Level:高度自动化,并且不期望驾驶员介入。在地理围栏内性质
5 Level:人类可以行驶的任何地方完全自主地运行
无人驾驶车辆由专门计算机和传感器组成,自主计算单元比人计算快十倍,甚至快多倍。在Apollo系统中,车辆计算单元受到大规模且强有力的云集群支持,任何给定的无人车驾驶车辆都有许多先进的传感器,他们执行感知和定位等任务,借助人工智能和传感器,车辆可以独立于任何人类驾驶员实现自主操作



![[附源码]计算机毕业设计springboot在线图书销售系统](https://img-blog.csdnimg.cn/15a8b9e10a88492ead22978adce42351.png)