👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🌈3 Matlab代码实现
🎉4 参考文献

💥1 概述
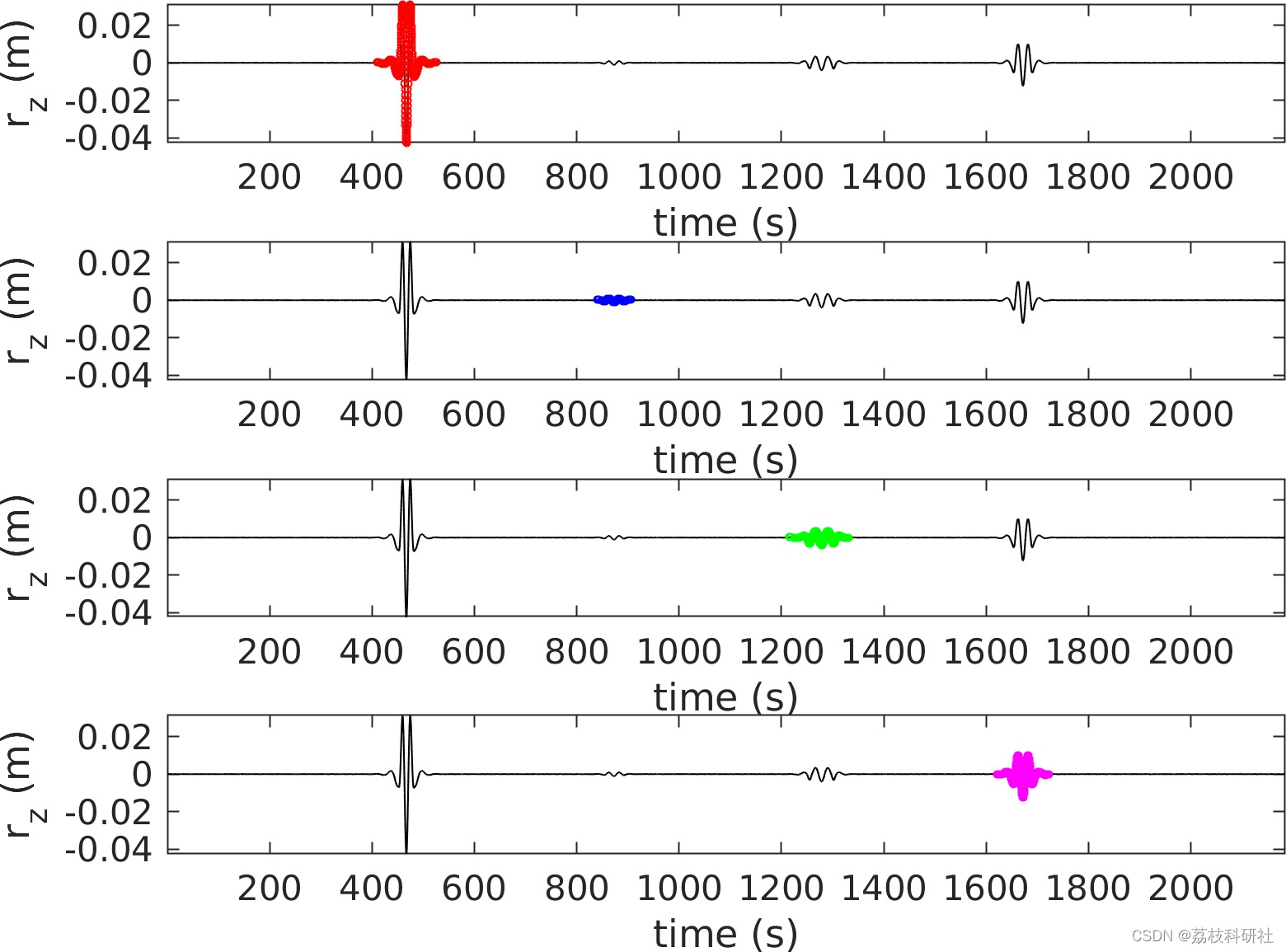
本文内容为:悬索桥的车辆振动用于自动识别车辆的质量、速度和到达时间。
以根据悬索桥上收集的振动数据自动识别关键车辆特性。然而,目前的数值实现与 ref [1] 有一些细微的差异。使用连续模型对桥梁进行建模,以降低与车辆识别相关的计算成本[2,3]。车辆被建模为移动质量以降低计算成本。在下文中,仅对主跨度的垂直运动进行建模。该算法适用于交通流量较少的偏远地区的桥梁。
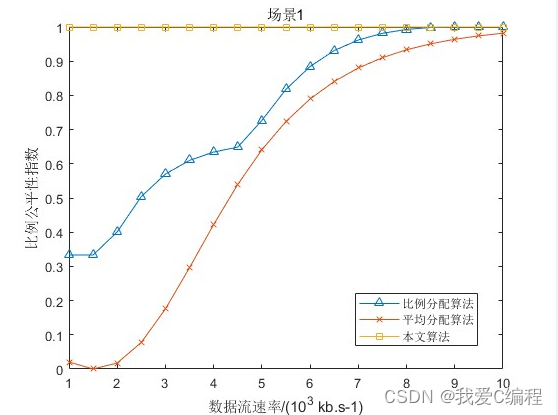
📚2 运行结果

部分代码:
%% Inputparseer
p = inputParser();
p.CaseSensitive = false;
p.addOptional('orderFilt',4);
p.addOptional('fcUp',0.15);
p.addOptional('fcLow',0.04);
p.addOptional('newN',200);
p.addOptional('deltaT',30);
p.addOptional('meanU',0);
p.addOptional('plotData',1);
p.addOptional('RMSE_threshold',0.3);
p.parse(varargin{:});
%%%%%%%%%%%%%%%%%%%%%%%%%%
newN = p.Results.newN ;
orderFilt = p.Results.orderFilt ;
fcUp = p.Results.fcUp;
fcLow = p.Results.fcLow;
deltaT = p.Results.deltaT;
meanU = p.Results.meanU;
plotData = p.Results.plotData;
RMSE_threshold = p.Results.RMSE_threshold;
%% Definition of constants and fundamental parameters
g = 9.81; % accleration of gravity
guess = 3000; % mass speed initial guess
[Nsensors,N]= size(Doz);
if Nsensors>1 && N==1
Doz = Doz';
[Nsensors,N]= size(Doz);
else
error('This version of the code does not include the possibility to include multiple accelerometers');
end
if numel(posAcc) ~=Nsensors, error('numel(posAcc) ~= size(DOz,1)'); end
[~,indY] = min(abs(posAcc-Bridge.x));
%% Fitting algorithm
options=optimset('TolX',1e-6,'TolFun',1e-6,'Display','off'); % increase the fitting precision if Suw = 0
Nvehicle = numel(tImpact);
myMass = zeros(1,Nvehicle);
rmse = zeros(1,Nvehicle);
modelFun = @getVehiclePara;
Direction = nan(1,Nvehicle);
if plotData==1, figure;end
for ii=1:Nvehicle
[Nsensors,N]= size(Doz);
t1 = tImpact(ii)-2/3*deltaT; % get lower boundary for simulation start
t2 = tImpact(ii)+3/2*deltaT; % get upper boundary for simulation stop
newT = linspace(t1,t2,newN);
newFs = 1/median(diff(newT));
rz = interp1(t,Doz,newT);
rz = filterMyData(rz(:)',newFs,orderFilt,fcUp,fcLow);
% Check if there exist NaNs
if any(isnan(rz)), warning('There exist nans values in the rz time series. Consider replacing them by interpolated values'); end
newSpeed = vehicleSpeed(ii);
% We assume that the turbulent load is negligible for the fitting
Wind.u = meanU + zeros(Bridge.Nyy,newN); % Include mean wind speed if needed
Wind.w = zeros(Bridge.Nyy,newN);
Wind.t = newT;
speed = newSpeed; % speed of each vehicle
tStart = tImpact(ii); %
% we initially assume that the vehicle direction is known
vehicleDirection = 1;
[myMass(ii)] = lsqcurvefit(@(para,t) modelFun(para,newT(:)),...
guess,newT(:),rz(:),100,1e5,options);
dummy = modelFun(abs(myMass(ii)),newT);
myRMSE = RMSE(reshape(rz(:),[],1)./max(abs(rz(:))),dummy(:)./max(abs(dummy)));
fprintf(['RMSE value is ',num2str(myRMSE,2),'. \n']);
% If the RMSE is larger than the acceptable threshold value, this may be
% due to the wrong assessement of the vehicle direction
if myRMSE>RMSE_threshold
fprintf(['RMSE value is ',num2str(myRMSE,2),'. New attempt is made by changing the vehicle direction \n']);
vehicleDirection = -1;
myMass(ii) = nlinfit(newT(:)',rz(:)',modelFun,guess,options);
dummy = modelFun(abs(myMass(ii)),newT);
myRMSE = RMSE(rz(:)./max(abs(rz(:))),dummy(:)./max(abs(dummy)));
fprintf(['new RMSE value is ',num2str(myRMSE,2),'. \n']);
end
Direction(ii) = vehicleDirection;
rmse(ii) = RMSE(rz(:),modelFun(myMass(ii),newT));
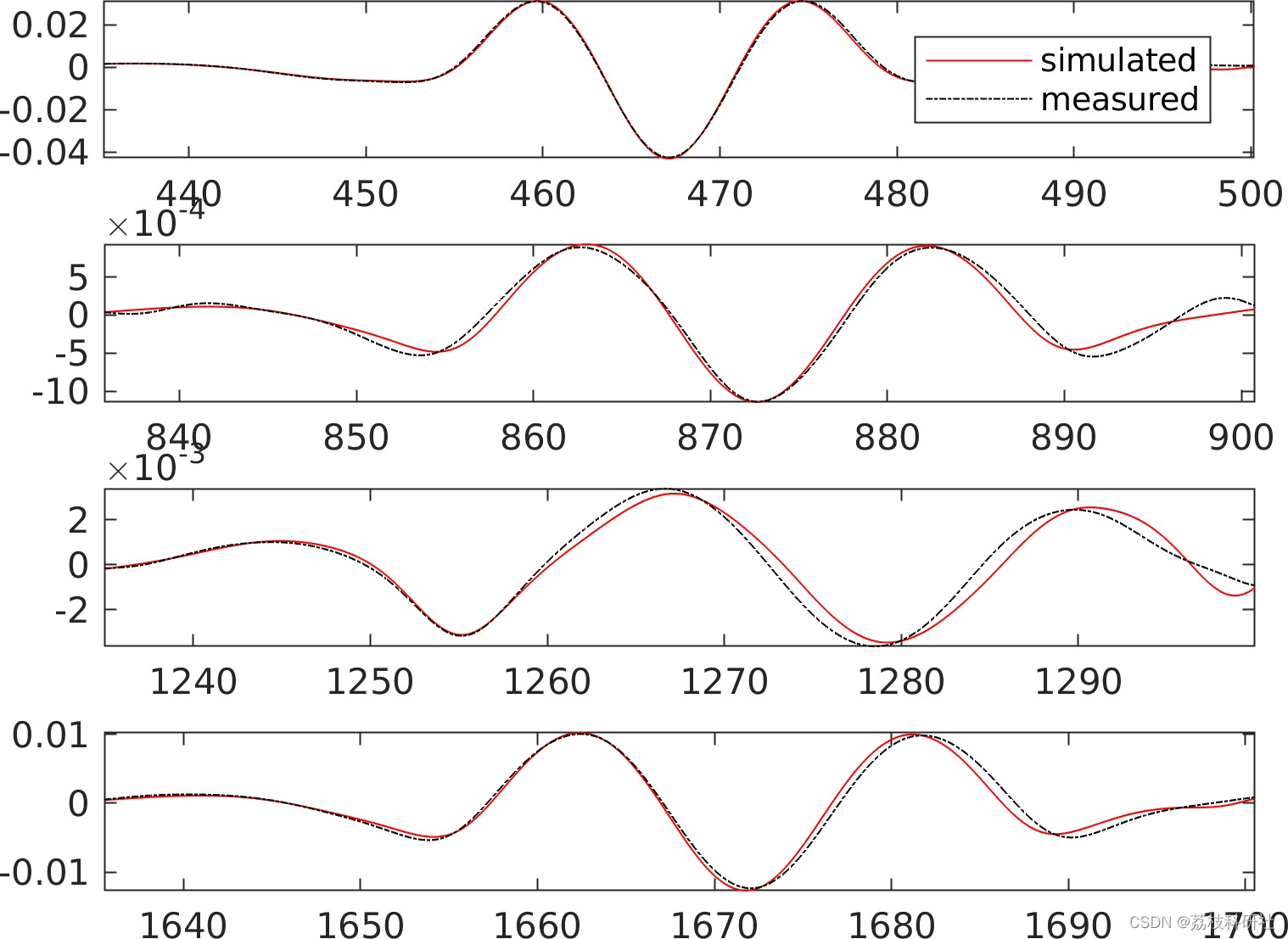
if plotData==1
dummy = reshape(modelFun(myMass(ii),newT),[],Nsensors)';
subplot(Nvehicle,1,ii)
plot(newT,dummy,'r',newT,rz,'k-.');
if ii==1
legend('simulated','measured','location','best');
end
set(gcf,'color','w')
axis tight
end
end
if nargout==3
varargout{1} = Direction;
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [myDo] = getVehiclePara(para,t,varargin)
p = inputParser();
p.CaseSensitive = false;
p.addOptional('rho',1.25);
p.addOptional('k',1/4);
p.parse(varargin{:});
% shorthen the variables name
rho = p.Results.rho ;
k = p.Results.k ;
%%
Ncar = numel(para);
for pp=1:Ncar
vehicle(pp).mass = para(pp);
vehicle(pp).speed = speed(pp,:);
vehicle(pp).tStart = tStart(pp);
vehicle(pp).direction = vehicleDirection;
end
% shortened variable
D = Bridge.D;
B = Bridge.B;
Cd = Bridge.Cd;
Cl = Bridge.Cl;
Cm = Bridge.Cm;
dCd = Bridge.dCd;
dCl = Bridge.dCl;
dCm =Bridge.dCm;
phi = Bridge.phi;
wn = Bridge.wn;
zetaStruct = Bridge.zetaStruct;
u = Wind.u;
w = Wind.w;
dt = median(diff(t));
N1 = numel(t);
% Definition of Nyy, and Nmodes:
[~,Nmodes,Nyy]= size(Bridge.phi);
if max(Bridge.x)== 1
y = Bridge.x.*Bridge.L;
else
warning('Bridge.x is not normalized');
end
%% MODAL MASS AND STIFNESS CALCULATION
Mtot = diag([Bridge.m+2*Bridge.mc,Bridge.m+2*Bridge.mc,Bridge.m_theta]);
phi0 = reshape(phi,[],Nyy);
phi0_N = bsxfun(@times,phi0,1./max(abs(phi0),[],2));
Nm = size(phi0,1);
Mtot = repmat(Mtot,round(Nm/3),round(Nm/3));
M = zeros(Nm+Ncar);
K = zeros(Nm+Ncar);
C = zeros(Nm+Ncar);
for pp=1:Nm
for qq=1:Nm/3
if (pp+3*qq)<=Nm
Mtot(pp,pp+3*qq) = 0;
Mtot(pp+3*qq,pp) = 0;
end
end
for qq=1:Nm
M(pp,qq) = trapz(y,phi0_N(pp,:).*phi0_N(qq,:).*Mtot(pp,qq));
end
end
K(1:Nm,1:Nm) = diag(wn(:)).^2*M(1:Nm,1:Nm);
C(1:Nm,1:Nm) = 2.*diag(wn(:))*M(1:Nm,1:Nm)*diag(zetaStruct(:));
%% PREALLOCATION
CoeffAero = @(C,alpha) C(1)+alpha.*C(2); % linear
C1=[Cd,dCd];
C2=[Cl,dCl];
C3=[Cm,dCm];
%% INITIALISATION
Do = zeros(3,Nyy,N1);
Ao = zeros(3,Nyy,N1);
Aoz_car = zeros(Ncar,N1);
rt=zeros(Nyy,1);
dry=zeros(Nyy,1);
drz=zeros(Nyy,1);
drt=zeros(Nyy,1);
% Case of no wind
if mean(nanstd(u,0,2))<0.01 && mean(nanstd(w,0,2))<0.01 && nanmean(nanmean(u,2))<0.1
noWind=1;
else
noWind=0;
end
for idt=1:N1
Fmodal_wind = zeros(Nm);
% get modal forces
if noWind==0 % if wind turbulence is acounted for
[Fmodal_wind(1:Nm,1:Nm)]= getFmodal(CoeffAero,C1,C2,C3,y,...
u(:,idt),w(:,idt),dry,drz,drt,D,B,rt,k,rho,Nmodes,phi0_N);
if Ncar>0
Fmodal_wind(Nm+1:end,Nm+1:end)=0; % ensure that there is no wind load on the car
end
else
Fmodal_wind = zeros(Nm+Ncar);
end
if Ncar>0
[Fmodal_car] = getVehicleLoad(t,vehicle,Bridge,Nm,y,phi0_N,idt);
Fmodal = Fmodal_wind+ Fmodal_car; % load on the bridge
else
Fmodal = Fmodal_wind;
end
if idt ==1 % initial acceleration
DoM = zeros(Nm);
VoM = zeros(Nm);
AoM = M(1:Nm,1:Nm)\(Fmodal(1:Nm,1:Nm)-C(1:Nm,1:Nm).*VoM-K(1:Nm,1:Nm).*DoM);
[DoM,VoM,AoM,Do(:,:,idt),Vo,Ao(:,:,idt),Aoz_car(:,idt),~] =...
Newmark(dt,DoM,VoM,AoM,Fmodal(1:Nm,1:Nm),M(1:Nm,1:Nm),K(1:Nm,1:Nm),C(1:Nm,1:Nm),phi0,Ncar,Nyy,Nm);
else
[DoM,VoM,AoM,Do(:,:,idt),Vo,Ao(:,:,idt),Aoz_car(:,idt),~] =...
Newmark(dt,DoM,VoM,AoM,Fmodal(1:Nm,1:Nm),M(1:Nm,1:Nm),K(1:Nm,1:Nm),C(1:Nm,1:Nm),phi0,Ncar,Nyy,Nm);
end
rt = Do(3,:,idt)';
dry = Vo(1,:)';
drz = Vo(2,:)';
drt = Vo(3,:)';
end
dummy0 = detrend(squeeze(Do(2,indY,:)))';
[myDo] = filterMyData(dummy0(:)',newFs,orderFilt,fcUp,fcLow);
myDo = myDo(:);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [Fmodal]= getFmodal(CoeffAero,C1,C2,C3,y,u,w,dry,drz,drt,...
D,B,rt,k,rho,Nmodes,phi0_N)
% [Fmodal]= getFmodal(y,u,w,dry,drz,drt,D,B,rt) computes the modal
% forces acting on the main-span of a suspension bridge bridge deck
%%
Vrel = (u-dry);
W = (w-drz-k*B.*drt);
Vrel = sqrt(Vrel.^2+W.^2); % is [Nyy x 1]
beta = atan(W./Vrel); % is [Nyy x 1]
alpha = rt+beta; % is [Nyy x N]
COEFF = 1/2*rho*B.*Vrel.^2;
Ftot(:,1)=COEFF.*(D/B.*CoeffAero(C1,alpha).*cos(beta) - CoeffAero(C2,alpha).*sin(beta));
Ftot(:,2)=COEFF.*(D/B.*CoeffAero(C1,alpha).*sin(beta) + CoeffAero(C2,alpha).*cos(beta));
Ftot(:,3)=COEFF.*(B.*CoeffAero(C3,alpha));
F = repmat(Ftot,1,Nmodes)';
Fmodal = trapz(y,F.*phi0_N,2);
Fmodal = diag(Fmodal(:));
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [x1,dx1,ddx1,Do,Vo,Ao,Aoz_car,Doz_car] =...
Newmark(dt,x0,dx0,ddx0,F,M,K,C,phi0,Ncar,Nyy,Nm,varargin)
%% options: default values
inp = inputParser();
inp.CaseSensitive = false;
inp.addOptional('alpha',1/4);
inp.addOptional('beta',1/2);
inp.parse(varargin{:});
% shorthen the variables name
alphaCoeff = inp.Results.alpha ;
beta = inp.Results.beta;
🌈3 Matlab代码实现
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1] Cheynet, E., Daniotti, N., Jakobsen, J. B., & Snæbjörnsson, J. (2020). Improved long‐span bridge modeling using data‐driven identification of vehicle‐induced vibrations. Structural Control and Health Monitoring, volume 27, issue 9. https://doi.org/10.1002/stc.2574
[2] E. Cheynet. ECheynet/EigenBridge v3.3. Zenodo, 2020, .



![[附源码]计算机毕业设计springboot学生在线考试系统](https://img-blog.csdnimg.cn/34a66b8c7eb341c0aca59ae65a0f73d1.png)