这两天接了个小任务,需求是替换Dynaslam里面的动态物体识别模块,将MaskRCNN换为YoloV5,这里记录一下过程中遇见的问题。
一、运行Dynaslam
Dynaslam本身是一个基于ORBSLAM2的视觉SLAM框架,论文并没有仔细看过,简单来说就是在ORBSLAM的基础上,加了一动态物体的滤除,这里的滤除使用了两种策略:基于MaskRCNN和基于视觉几何。既然要替换使用的过滤网络,那么首先就是要跑起来这个Dyanslam,从代码来看,本身还是基于ORBSLAM的,但是加入了神经网络的模块,所以引入了很多Python相关的内容,这里配置主要参照下面的链接:
Dynaslam环境配置与代码替换
大多数的问题按照链接进行修改即可,这里补充一下几个链接里没有的问题:
scikit-image库
这个库主要的问题是明明安装上了但是依然显示找不到库,这里网上查了很多办法,有说换版本的有说更新的,本人用的是下面的指令进行的更新,在两台电脑上都修改成功了。
pip install scikit-image --upgrade --user
运行带有mask版本的Dynaslam
在运行Dyanslam的过程中,如果最后两个参数进行了输入,则表明运行时使用了MaskRCNN进行动态物体的过滤,但是在运行时经常会显示不能初始化,这里经过代码的排查,并不是参数或者设备性能的问题,是Dynaslam特征点提取策略的问题。Dynaslam本身是基于ORBSLAM的,在ORBSLAM的初始化时,要求两张图至少要有500对匹配特征点才可以进行初始化,但是在Dynaslam中,由于对场景内的动态物体进行了过滤,导致在提取特征点时原本出现在动态物体上的特征点被遮挡了,所以达不到ORBSLAM初始化的点对数要求,解决方法有两种,一个是修改yaml文件,让提取ORB特征点的时候尽可能提取更多特征点,另一个方法是直接修改初始化的代码,降低点对数要求,两种方法其实都是要让Dynaslam成功初始化。
二、配置Yolov5环境
这一步没有太大的问题,用anaconda创建一个新环境然后配置就可以了,下载yolov5的源码然后用里面的requirement.txt进行配置即可,需要注意的是,很多的环境都需要挂代理去下载,不挂的话要么龟速要么就直接显示查询不到库文件,关于Ubuntu下面如何配置代理文件可以参考下面的链接:Ubuntu环境下配置clash代理
三、代码的魔改
将MaskRCNN替换,其实本来并不是一个很麻烦的内容,从Dynaslam代码来看,只要修改调用的Python文件就可以了,改之前我也是这么想的,但改的过程啥错误都出来了。
Yolov5封装
在改Dynaslam之前,首先要把Yolov5的代码进行封装,具体来说就是让原本predict.py里面通过主函数调用的方法,转换为通过对象进行的调用,这里主要是涉及一些Python基础语法的问题,并且原本通过命令行读取参数的部分现在也用不上了,需要删除一部分函数,最后为了与Dynaslam的接口相对应,需要将传递的参数进行更换,不再使用文件名进行读取,而是直接传递一个numpy的图像。这里放一下封装好的Yolov5,要改的只有一个predict.py,其余并没有什么变化,使用时初始化一个Mask对象并调用GetDynSeg函数传递一张图像即可。
import argparse
import os
import platform
import sys
from pathlib import Path
import numpy
import numpy as np
import torch
FILE = Path(__file__).resolve()
ROOT = FILE.parents[1] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
from models.common import DetectMultiBackend
from utils.dataloaders import IMG_FORMATS, VID_FORMATS, LoadImages, LoadScreenshots, LoadStreams
from utils.general import (LOGGER, Profile, check_file, check_img_size, check_imshow, check_requirements, colorstr, cv2,
increment_path, non_max_suppression, print_args, scale_boxes, scale_segments,
strip_optimizer, xyxy2xywh)
from utils.plots import Annotator, colors, save_one_box
from utils.segment.general import masks2segments, process_mask
from utils.torch_utils import select_device, smart_inference_mode
from utils.augmentations import (Albumentations, augment_hsv, classify_albumentations, classify_transforms, copy_paste,
cutout, letterbox, mixup, random_perspective)
class Mask(object):
def __init__(self):
self.weights = ROOT / 'yolov5m-seg.pt' # model.pt path(s)
self.source = ROOT / 'data/images' # file/dir/URL/glob/screen/0(webcam)
self.data = ROOT / 'data/coco128.yaml' # dataset.yaml path
self.imgsz = (640, 640) # inference size (height, width)
self.conf_thres = 0.25 # confidence threshold
self.iou_thres = 0.45 # NMS IOU threshold
self.max_det = 1000 # maximum detections per image
self.device = '' # cuda device, i.e. 0 or 0,1,2,3 or cpu
self.view_img = False # show results
self.save_txt = False # save results to *.txt
self.save_conf = False # save confidences in --save-txt labels
self.save_crop = False # save cropped prediction boxes
self.nosave = False # do not save images/videos
self.classes = None # filter by class: --class 0, or --class 0 2 3
self.agnostic_nms = False # class-agnostic NMS
self.augment = False # augmented inference
self.visualize = False # visualize features
self.update = False # update all models
self.project = ROOT / 'runs/predict-seg' # save results to project/name
self.name = 'exp' # save results to project/name
self.exist_ok = False, # existing project/name ok, do not increment
self.line_thickness = 3 # bounding box thickness (pixels)
self.hide_labels = False # hide labels
self.hide_conf = False # hide confidences
self.half = False # use FP16 half-precision inference
self.dnn = False # use OpenCV DNN for ONNX inference
self.vid_stride = 1 # video frame-rate stride
self.retina_masks = False
source = str(self.source)
save_img = not self.nosave and not source.endswith('.txt') # save inference images
self.is_file = Path(source).suffix[1:] in (IMG_FORMATS + VID_FORMATS)
if self.is_file:
source = check_file(source) # download
# Directories
self.save_dir = increment_path(Path(self.project) / self.name, exist_ok=self.exist_ok) # increment run
( self.save_dir / 'labels' if self.save_txt else self.save_dir).mkdir(parents=True, exist_ok=True) # make dir
# Load model
self.device = select_device(self.device)
self.model = DetectMultiBackend(weights=self.weights, device=self.device, dnn = self.dnn, data=self.data, fp16=self.half)
self.stride, self.names, self.pt = self.model.stride, self.model.names, self.model.pt
self.imgsz = check_img_size(self.imgsz, s=self.stride) # check image size
# Dataloader
self.bs = 1 # batch_size
self.dataset = None
vid_path, vid_writer = [None] * self.bs, [None] * self.bs
def GetDynSeg(self, image):
self.img_size = (640,480)
im0 = image
im = letterbox(im0, self.img_size, stride=self.stride, auto=False)[0] # padded resize
im = im.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
im = np.ascontiguousarray(im)
self.model.warmup(imgsz=(1 if self.pt else self.bs, 3, *self.imgsz)) # warmup
seen, windows, dt = 0, [], (Profile(), Profile(), Profile())
with dt[0]:
im = torch.from_numpy(im).to(self.model.device)
im = im.half() if self.model.fp16 else im.float() # uint8 to fp16/32
im /= 255 # 0 - 255 to 0.0 - 1.0
if len(im.shape) == 3:
im = im[None] # expand for batch dim
# Inference
with dt[1]:
pred, proto = self.model(im, augment=self.augment, visualize=False)[:2]
# NMS
with dt[2]:
pred = non_max_suppression(pred, self.conf_thres, self.iou_thres, self.classes, self.agnostic_nms,
max_det=self.max_det, nm=32)
for i, det in enumerate(pred): # per image
seen += 1
imc = im0.copy() if self.save_crop else im0 # for save_crop
annotator = Annotator(im0, line_width=self.line_thickness, example=str(self.names))
if len(det):
masks = process_mask(proto[i], det[:, 6:], det[:, :4], im.shape[2:], upsample=True) # HWC
det[:, :4] = scale_boxes(im.shape[2:], det[:, :4], im0.shape).round() # rescale boxes to im0 size
# Segments
if self.save_txt:
segments = reversed(masks2segments(masks))
segments = [scale_segments(im.shape[2:], x, im0.shape).round() for x in segments]
# Print results
for c in det[:, 5].unique():
n = (det[:, 5] == c).sum() # detections per class
# Mask plotting
annotator.masks(masks,
colors=[colors(x, True) for x in det[:, 5]],
im_gpu=None if self.retina_masks else im[i])
masks_ = masks.permute(1, 2, 0)
newmask = np.zeros((masks.shape[1], masks.shape[2]))
for j, (*xyxy, conf, cls) in enumerate(det[:, :6]):
c = int(cls) # integer class
mask=masks_[:,:,j]
mask=np.squeeze(mask,-1)
if(c==0 ):
newmask[mask == 1] = 1
import scipy.io as io
torch.set_printoptions(profile="full")
return newmask
Dynaslam接口修改
Dynaslam修改,主要还是因为Python版本的问题,原本使用的MaskRCNN是Python2.7版本,换成YoloV5之后是Python3.7版本,所以需要改很多东西,这里很多东西改的稀里糊涂,简单记录一下还有印象的修改内容。
首先是Python的环境问题,在运行时要将原本的conda环境换成运行yolo的conda环境,缺哪些库就安装哪些库,除此之外,要修改Dynaslam里面的cmakelist,将一些原本指向Python2.7的路径换为Python3.7,这一步看似简单,耗费了一晚上的时间,很多路径问题到现在都没有搞清楚,但是代码确实是跑起来了。
其次是版本更换带来的写法问题,这个涉及一些Python和c++联合编程的知识,在c++里面初始化一个Python对象,在Python2.7里面对应的函数是PyMethod_New,但是在Python3.7里,这个函数被换成了PyInstanceMethod_New,如果换了版本,写法上也需要改,这是个大坑,如果对联合编程不熟悉(比如我),很容易忽略这里的错误。

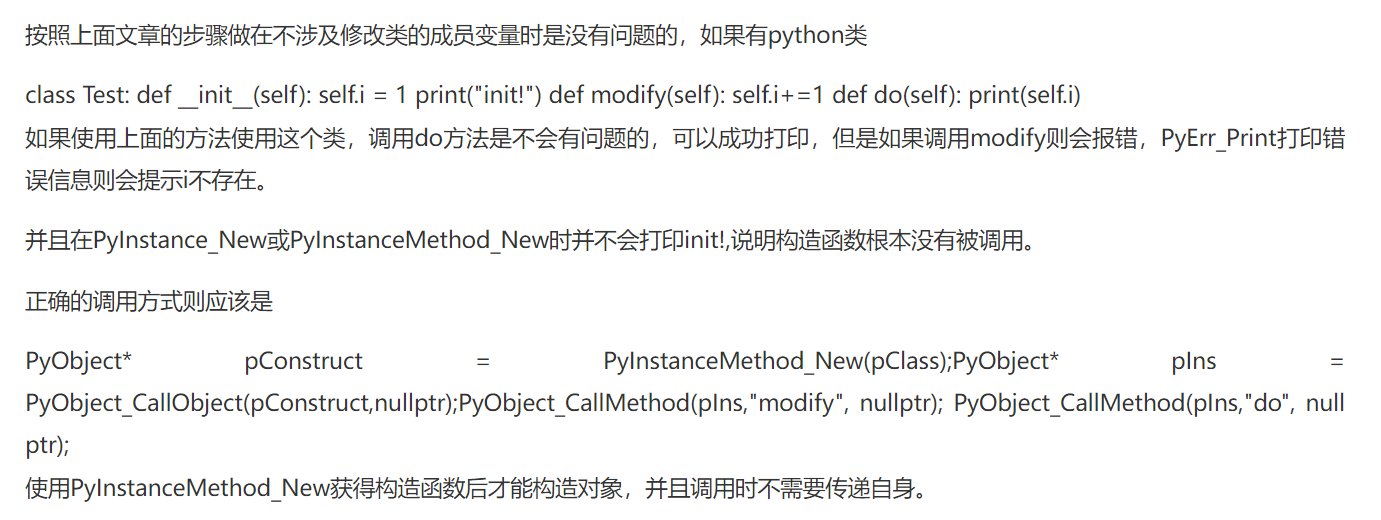
还有一个印象比较深刻的bug,是调用Python对象的函数时,在c++的接口里预留了好多的函数,都可以实现调用Python对象的函数,不同的函数写法也是不一样的,主要问题在于,如何正确给函数传递self,也就是Python对象自身,在Python程序里,有时候我们需要self参数来读取对象自身的一些参数,但如果我们要通过c++进行调用,这个self的传递就成了个问题,这里我尝试了两种解决方案,一个是在传参时,将对象本身作为一个参数再次传递回去,比如说使用PyObject_CallMethod这个函数,这个函数的第三个参数是指定后续参数的类型,这时我们可以在这个字段加一个O,表示后续的一个参数是一个对象,然后把这个对象设置为自身,那么就相当于将自身传递给了函数,但这种写法会导致程序在运行时不能执行init函数,也就是初始化的对象没有init,进而导致后续的一系列错误,所以尝试的第二种解决方案,就是在创建对象后,单独调用它的构造函数,这里是参考的c++调用Python方法里面的内容,这种写法虽然不知道什么原理,但确实成功了。


![[附源码]Python计算机毕业设计Django基于协同过滤的资讯推送平台](https://img-blog.csdnimg.cn/d21b9b073bcc47f6a85870b42cebaaa8.png)



![[附源码]Python计算机毕业设计Django基于java的社区管理系统](https://img-blog.csdnimg.cn/b0e2129fac604142b46891fbccfad31f.png)
![[附源码]计算机毕业设计新冠疫苗接种预约系统Springboot程序](https://img-blog.csdnimg.cn/568a2f3901e24607b3bcd14e44f715b7.png)


![[附源码]Python计算机毕业设计Django基于Java的图书购物商城](https://img-blog.csdnimg.cn/75a75284f55246019277cdc82bd71054.png)