1. 代码整体框架
首先看看工程目录结构,主要有五个文件,分别是utility.h,featureExtraction.cpp, imageProjection.cpp,imuPreintegration.cpp,mapOptmization.cpp
LIO-SAM/
config/
params.yaml # 参数配置
include/
utility.h # 读取参数,提供一些工具方法
launch/
run.launch # 启动文件
src/
featureExtraction.cpp # 点云计算曲率,提取特征(角点、平面点)
imageProjection.cpp # 激光点云运动畸变校正
imuPreintegration.cpp # imu预积分因子图优化,计算每时刻imu里程计
mapOptmization.cpp # scan-to-map匹配,因子图优化,闭环优化对照LIO-SAM作者给出的下面这张系统架构图,我们首先获取一个整体上的印象。

首先对于一个SLAM系统,后端优化是一个核心模块,有较早的卡尔曼滤波器、现在流行的图优化、因子图优化。LIO-SAM则采用因子图优化方法,包含四种因子。
LIO-SAM因子:IMU预积分因子,激光里程计因子,GPS因子,闭环因子。
下图是LIO-SAM的因子图结构,变量节点是关键帧。相邻的关键帧之间,通过IMU数据计算预积分,获得位姿变换,构建IMU预积分因子。每个关键帧还有对应的GPS数据参与校正。如果有闭环出现,闭环帧之间可以构建约束。关键帧之间有若干普通帧,这些帧不参与图优化,但是会执行scan-to-map的配准,优化每帧位姿。

2. 整体流程
- 激光运动畸变校正。利用当前帧起止时刻之间的IMU数据、IMU里程计数据计算预积分,得到每一时刻的激光点位姿,从而变换到初始时刻激光点坐标系下,实现校正。
- 提取特征。对经过运动畸变校正之后的当前帧激光点云,计算每个点的曲率,进而提取角点、平面点特征。
- scan-to-map匹配。提取局部关键帧map的特征点,与当前帧特征点执行scan-to-map匹配,更新当前帧的位姿。
- 因子图优化。添加激光里程计因子、GPS因子、闭环因子,执行因子图优化,更新所有关键帧位姿。
- 闭环检测。在历史关键帧中找候选闭环匹配帧,执行scan-to-map匹配,得到位姿变换,构建闭环因子,加入到因子图中一并优化。
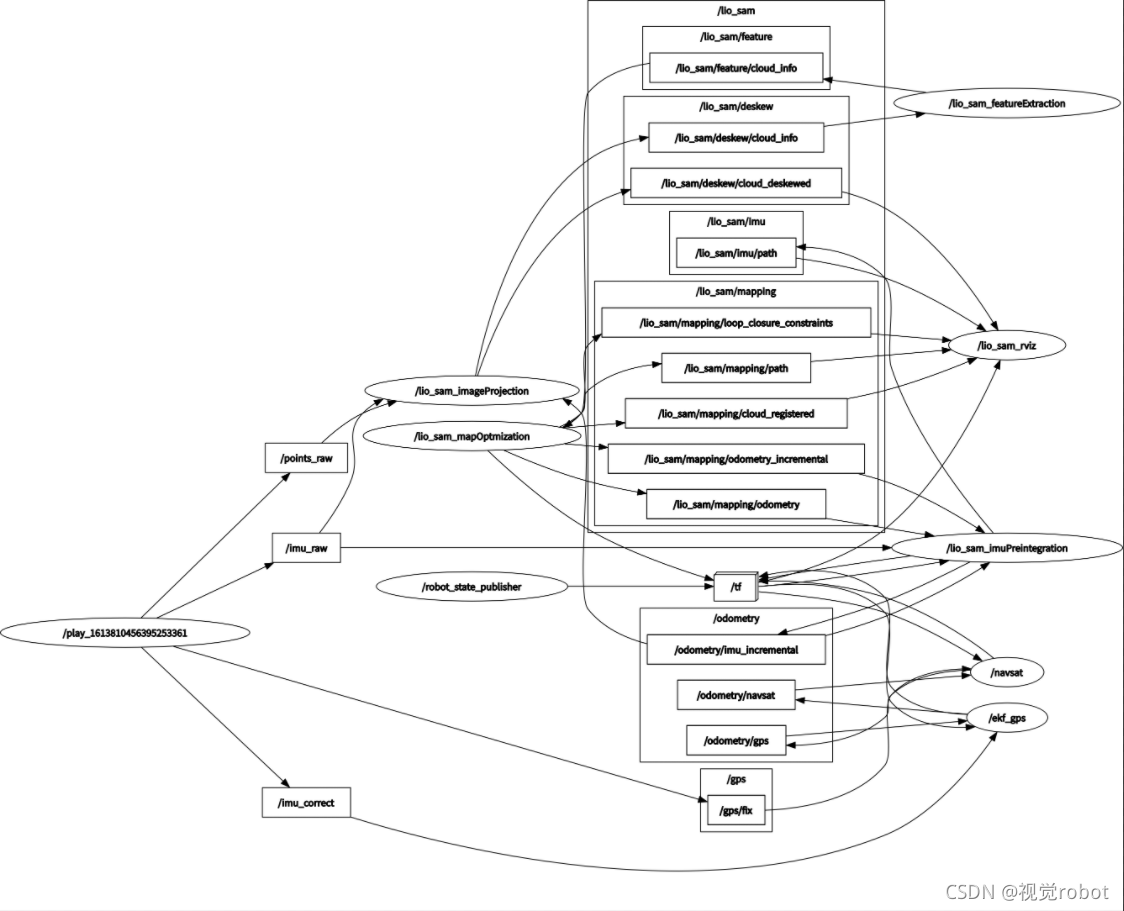
下面在整体上给出这四个文件对应模块的功能,以及模块之间数据的发布-订阅关系。
2.1. ImageProjection 激光运动畸变校正
2.1.1. 功能简介
- 利用当前激光帧起止时刻间的imu数据计算旋转增量,IMU里程计数据(来自ImuPreintegration)计算平移增量,进而对该帧激光每一时刻的激光点进行运动畸变校正(利用相对于激光帧起始时刻的位姿增量,变换当前激光点到起始时刻激光点的坐标系下,实现校正);
- 同时用IMU数据的姿态角(RPY,roll、pitch、yaw)、IMU里程计数据的的位姿,对当前帧激光位姿进行粗略初始化。
2.1.2. 订阅
- 订阅原始IMU数据;
- 订阅IMU里程计数据,来自ImuPreintegration,表示每一时刻对应的位姿;
- 订阅原始激光点云数据。
2.1.3. 发布
- 发布当前帧激光运动畸变校正之后的有效点云,用于rviz展示;
- 发布当前帧激光运动畸变校正之后的点云信息,包括点云数据、初始位姿、姿态角、有效点云数据等,发布给FeatureExtraction进行特征提取。
2.2. FeatureExtraction 点云特征提取
2.2.1. 功能简介
对经过运动畸变校正之后的当前帧激光点云,计算每个点的曲率,进而提取角点、平面点(用曲率的大小进行判定)。
2.2.2. 订阅
订阅当前激光帧运动畸变校正后的点云信息,来自ImageProjection。
2.2.3. 发布
- 发布当前激光帧提取特征之后的点云信息,包括的历史数据有:运动畸变校正,点云数据,初始位姿,姿态角,有效点云数据,角点点云,平面点点云等,发布给MapOptimization;
- 发布当前激光帧提取的角点点云,用于rviz展示;
- 发布当前激光帧提取的平面点点云,用于rviz展示。
2.3. ImuPreintegration IMU预积分
2.3.1. TransformFusion类
- 功能简介
主要功能是订阅激光里程计(来自MapOptimization)和IMU里程计,根据前一时刻激光里程计,和该时刻到当前时刻的IMU里程计变换增量,计算当前时刻IMU里程计;rviz展示IMU里程计轨迹(局部)。
- 订阅
订阅激光里程计,来自MapOptimization;
订阅imu里程计,来自ImuPreintegration。
- 发布
发布IMU里程计,用于rviz展示;
发布IMU里程计轨迹,仅展示最近一帧激光里程计时刻到当前时刻之间的轨迹。
2.3.2. ImuPreintegration类
- 功能简介
用激光里程计,两帧激光里程计之间的IMU预计分量构建因子图,优化当前帧的状态(包括位姿、速度、偏置);
以优化后的状态为基础,施加IMU预计分量,得到每一时刻的IMU里程计。
- 订阅
订阅IMU原始数据,以因子图优化后的激光里程计为基础,施加两帧之间的IMU预计分量,预测每一时刻(IMU频率)的IMU里程计;
订阅激光里程计(来自MapOptimization),用两帧之间的IMU预计分量构建因子图,优化当前帧位姿(这个位姿仅用于更新每时刻的IMU里程计,以及下一次因子图优化)。
- 发布
发布imu里程计;
2.4. MapOptimization 因子图优化
2.4.1. 功能简介
- scan-to-map匹配:提取当前激光帧特征点(角点、平面点),局部关键帧map的特征点,执行scan-to-map迭代优化,更新当前帧位姿;
- 关键帧因子图优化:关键帧加入因子图,添加激光里程计因子、GPS因子、闭环因子,执行因子图优化,更新所有关键帧位姿;
- 闭环检测:在历史关键帧中找距离相近,时间相隔较远的帧设为匹配帧,匹配帧周围提取局部关键帧map,同样执行scan-to-map匹配,得到位姿变换,构建闭环因子数据,加入因子图优化。
2.4.2. 订阅
- 订阅当前激光帧点云信息,来自FeatureExtraction;
- 订阅GPS里程计;
- 订阅来自外部闭环检测程序提供的闭环数据,本程序没有提供,这里实际没用上。
2.4.3. 发布
- 发布历史关键帧里程计;
- 发布局部关键帧map的特征点云;
- 发布激光里程计,rviz中表现为坐标轴;
- 发布激光里程计;
- 发布激光里程计路径,rviz中表现为载体的运行轨迹;
- 发布地图保存服务;
- 发布闭环匹配局部关键帧map;
- 发布当前关键帧经过闭环优化后的位姿变换之后的特征点云;
- 发布闭环边,rviz中表现为闭环帧之间的连线;
- 发布局部map的降采样平面点集合;
- 发布历史帧(累加的)的角点、平面点降采样集合;
- 发布当前帧原始点云配准之后的点云;
参考文献
LIO-SAM源码解析:准备篇 - 知乎



![[附源码]Python计算机毕业设计SSM绝味鸭脖连锁店信息系统(程序+LW)](https://img-blog.csdnimg.cn/f4a0c865d0b04218b3efec392e386edd.png)