引言
据睿铂统计,目前约70%倾斜摄影相机都用于测量项目,其中绝大部分是地籍测量相关项目。例如黑龙江某客户已使用睿铂相机累计完成约1000平方公里的地籍项目。倾斜摄影技术虽然在农村地籍测量项目中应用较好,但却无法解决高楼区域地籍测量的问题,为应对该问题,睿铂推出了DG4pros倾斜摄影解决方案。
前段时间我们为大家介绍了很多DG4pros的技术点,最近非常多的客户都向我们咨询这款产品,也想知道它的实战能力是否真如理论分析的那样。本次,睿铂为大家分享一个睿铂战略合作伙伴——浙江省测绘大队用DG4Pros完成高楼区地籍建模项目的报告。
概述
倾斜摄影经过几年的发展,在测绘行业中已经得到了广泛的影用。倾斜摄影也从最初的被质疑满足不了精度,到现在已经广泛应用在农村地籍测量项目中。
但是由于设备技术条件的制约,倾斜摄影对于较大落差场景的地籍测量还是应对乏力,这主要是因为小型倾斜相机的镜头的焦距、像幅、畸变、相机同步性达不到要求。经过多年倾斜摄影经验,我们发现要做到误差在5公分以内,那么照片的分辨率必须要保证在2公分以内,同时还要保证模型的质量效果要非常好才能够实现。

一般用来做农村地籍测量项目的倾斜镜头焦距多为正摄25mm,斜射35mm。而精度要达到1:500要求,照片分辨率必须要在2公分以内。为了达到此目标,我们无人机的飞行高度一般在70-100M之间。但按照这个飞行高度根本没有办法完成100米高度楼房的倾斜摄影。就算勉强飞行,也无法保证楼顶的重叠度,导致模型质量非常差,而且因为飞行高度太低带来极大的危险。
为了解决该痛点,2019年5月我单位联手成都睿铂进行城区高楼的倾斜摄影测量精度验证测试。该测试目的是验证睿铂RIY-DG4pros倾斜摄影相机完成前端数据采集后,最终测图成果能否满足平面中误差5cm精度的要求。

设备选择
在此次测试中的难点是测区场景高低落差大,房屋密度高,楼面复杂,这些因素都会导致倾斜摄影时航飞难度增加、危险系数变高、模型效果变差从而导致用于地籍测量时的精度降低。
为了解决上诉种种困难,我们慎重选择设备。在多方选择后,我们发现大疆M600pro无人机搭载睿铂DG4pros非常适合做这个测试,因为相机的焦距比普通市面上的倾斜相机都长,这点可以保证我们的无人机飞行在一个足够安全的高度,还能保证地面物体的分辨率达到2公分以内。同时,全画幅的镜头能够帮助我们在高密度的高楼中飞行时,能够拍到房屋更多的角度,从而尽可能提升模型拼接质量。

测区与相控点布设
针对上述问题,为了增加难度,我们特别选择了平均楼高在100米的两个小区进行测试。
像控点位我们根据GOOGLE地图影像进行预设,设计原则尽量保证地面空旷无遮挡。点与点之间的距离在150-200M范围内。

像控样式是80*80正方形,按照对角分为红黄两色,以保证在反光过强或光照不足时都能够清晰的识别像控中心,来提高精度。

航线规划
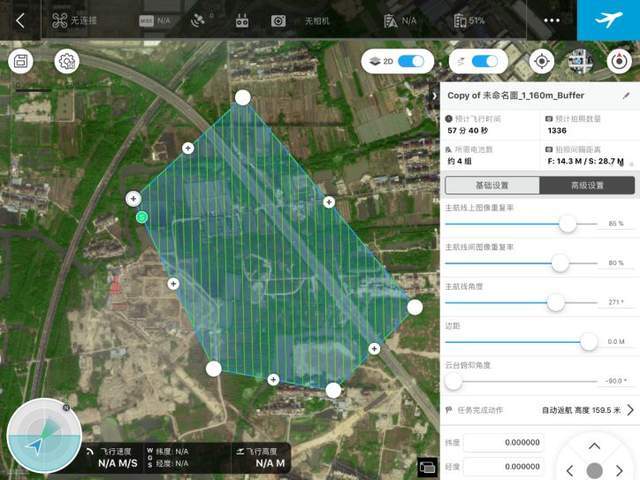
为了保证作业安全,航高预留60米的安全高度,无人机按160米高度作业。为了保证楼顶的重叠度,我们设置的航向重叠度为85%,旁向重叠度为80%、无人机按9.8m/s速度飞行。
空三报告
5.1 镜头畸变报告
倾斜镜头

正射镜头

从畸变方格图可以看到DG4pros镜头畸变极低,四周跟标准方格基本完全重合。
5.2 重投影均方根误差RMS
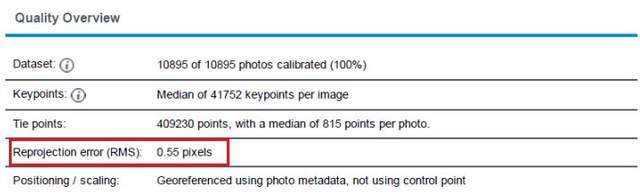
得益于睿铂的光学设计,把RMS控制在0.55,这个是保证模型精度的必要前提。
5.3 相机同步性



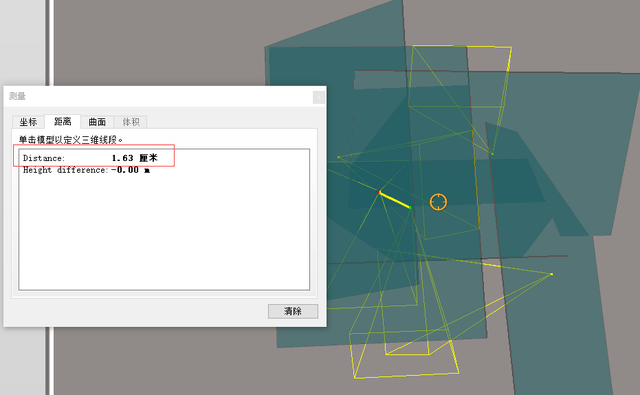
可以看到中心正射相机距离倾斜相机主点距离分别为:1.63cm、4.02cm、4.68cm、7.99cm,减去实际位置差,误差值为分别为:-4.37cm、-1.98cm、-1.32cm、1.99cm,位置最大差值4.37cm,相机同步性能够控制5ms以内。
5.4 刺点误差
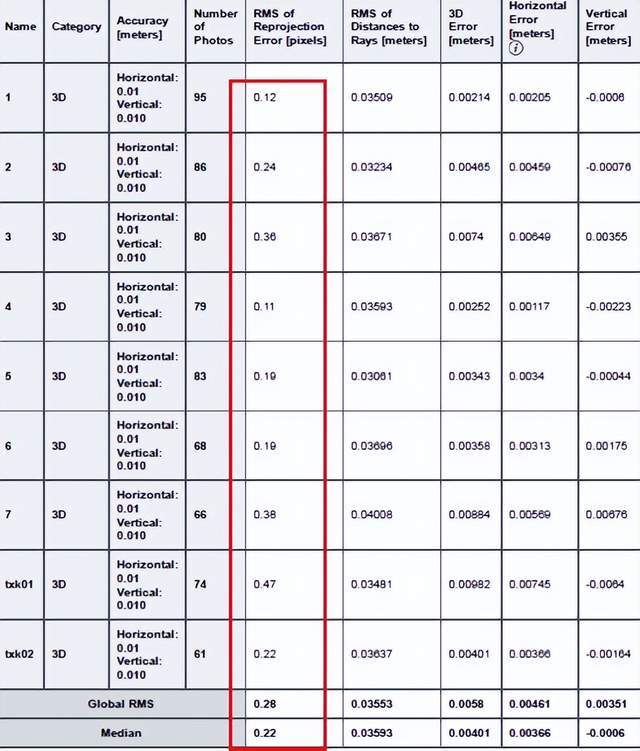
预刺点位与实际控制点重投影误差在0.12-0.47个像素之间。
建模效果









我们可以看到因为DG4pros使用了长焦镜头,所以模型楼底的房屋非常清晰。相机最小曝光时间间隔可以达到0.6s,即使航向重叠度提高到85%也没有发生漏片情况。
高楼的房脚线非常的清晰并且基本平直,这样也保证了我们后期在模型上面采房脚点能够更加的精准。
精度检查
我们使用全站仪实地采点,将DAT文件导入CAD。然后直接跟模型取出来的点进行比对。

取了点之后,我们在CAD中进行量测,可以看到模型取得房角点和实测的房角点平面误差为1.5CM。
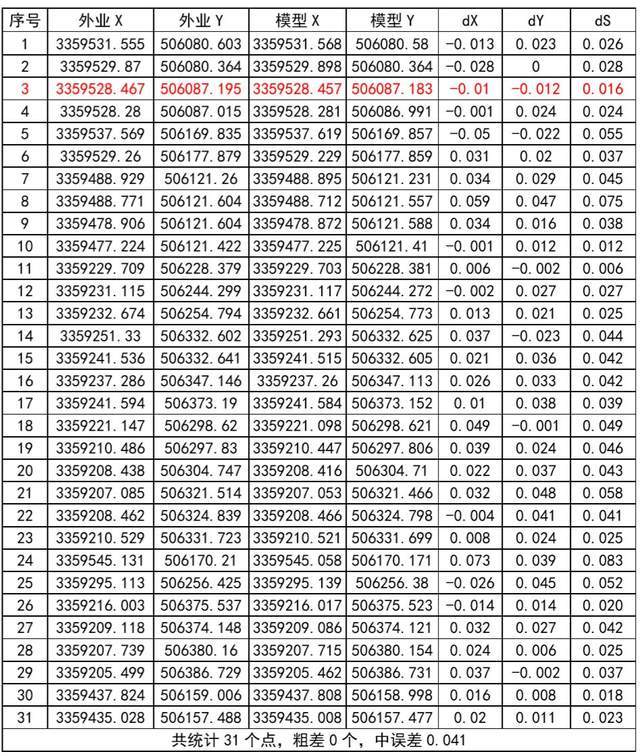
然后我们再在CAD中把两个点的坐标提取出来做成精度报告。

因为模型质量非常好,像控布设均匀,所以让我的模型和实测相比误差非常的小。
同样的方法我们一共统计了31个房角点。其中粗差数为0,中误差为0.041M,完全满足了国家1:500地籍测量的标准。
下图是我们做的精度报告表:(红色字体点位为上诉截图点)
总结
倾斜摄影对于高低落差大的场景进行地籍测量,曾经因为设备的限制和经验的不足,让我们对城市地籍测量望而却步,只能通过传统方式进行测量。但是高楼对RTK信号的影响也造成了测量的难度大和精度差的问题。如果用无人机航飞就可以完全摆脱卫星信号的影响,大大提高测量的整体精度。所以这次测试的成功对于我们来说意义重大。
尾声
本次浙江省测绘大队项目试验证明DG4Pros的确能够将重投影误差控制到较小的范围内,具有较好的建模精度,能够用于较高建筑的精确测量项目中。以后,睿铂也将携手更多合作伙伴,一起探究更多倾斜摄影技术的应用领域。
随着睿铂研发的不断深入,睿铂希望能获得更多合作伙伴的反馈,使相机的精度和效率不断提高,进一步降低成本。睿铂也将不断前行,希望所有产品成为测绘人手中的利器,睿铂也将更好地服务于客户,持续为客户创造更多价值。
浙江测绘大队
浙江省测绘大队隶属于浙江省地质勘查局,组建于1958年,是专业从事测绘的省级事业单位,是全国首批甲级测绘资质单位之一。目前拥有测绘甲级资质九项:大地测量、工程测量、不动产测绘、地理信息系统工程、测绘航空摄影、摄影测量与遥感、海洋测绘、地图编制、互联网地图服务;其它资质:土地规划乙级、土地勘测、矿山测量、不动产权籍调查。