ROS2使用msg和srv可以参考官网:
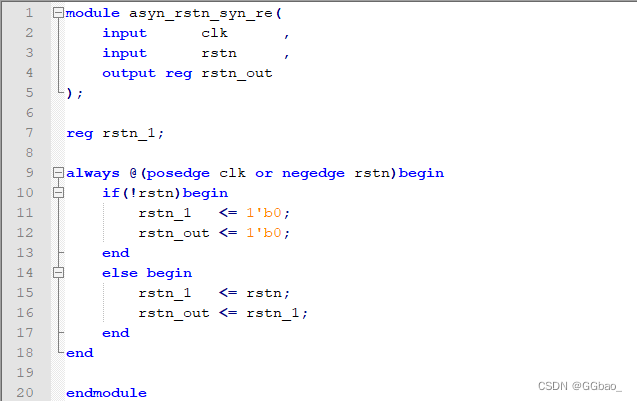
- 工程文件cpp所包含的头文件,其中
cpp_pubsub_self/msg/test.hpp为msg消息消息生成的头文件,具体的可以参考官网
注意事项:
在 ROS2 当中,使用 msg 和 srv 消息文件格式的时候,其中 CMakeLists.txt 文件当中和ROS1有点不同之处,就是 ROS2 需要自己添加自身的功能包,而且需要使用 ament_make 工具自行添加,不然就会出现如下错误:

解决方式
在 CMakeLists.txt 文件当中添加如下代码片段
add_executable(talker src/inter.cpp)
ament_target_dependencies(talker cpp_pubsub_self)
其中
talker 是编写发布者的节点名称,也是可执行文件的名称,可以自行定义
cpp_pubsub_self 是功能包的名称
运行结果

🌸🌸🌸完结撒花🌸🌸🌸
🌈🌈Redamancy🌈🌈





![CodeForces.1786A2.发牌.[中等][flg标识][数学规律][双色牌]](https://img-blog.csdnimg.cn/8137059c129646c0887c16f8199edc50.png)