文章说明:
1)参考资料:PYG官方文档。超链。
2)博主水平不高,如有错误还望批评指正。
3)我在百度网盘上传了这篇文章的jupyter notebook和有关文献。超链。提取码8848。
文章目录
- 前言
- 文献阅读
- 代码实操
- 历史遗留问题
前言
本篇文章接上一篇文章,超链,PointNet++无法解决旋转变化,所以我们使用PPFNet解决问题。
文献阅读
重要!重要!重要!我的理解不一定对!水平低请见谅!谨慎食用!
参考文献: PPFNet: Global Context Aware Local Features for Robust 3D Point Matching
文章概述: 参考文献提出Point Pair Feature NETwork模型,模型在点云中能够感知全局并且能够描述局部。模型受到PointNet的启发(PointNet++也是受到PointNet启发),采用新颖的N-tuple损失以及框架将全局信息嵌入于局部,具有置换不变性质,高召回率高鲁棒性。乃是3D点云提取特征重要工作文献。
理论概述:
11. 考虑两个点的集合
X
X
X以及
Y
Y
Y。
x
i
,
y
i
x_{i},y_{i}
xi,yi分别表示第
i
i
i个点坐标。假设它们存在某种关系并且是双射的,按照这篇The 3d-3d registration problem revisited的方法并且假定是刚性的。它们之间的关系可以分别表示为排列矩阵刚性变换。所以点集配准的L2可表示为:
d
(
X
,
Y
∣
R
,
t
,
P
)
=
1
n
∑
i
=
1
n
∣
∣
x
i
−
R
y
i
(
P
)
−
t
∣
∣
2
d(X,Y|R,t,P)=\frac{1}{n}\sum_{i=1}^n||x_i-Ry_{i(P)}-t||^2
d(X,Y∣R,t,P)=n1∑i=1n∣∣xi−Ryi(P)−t∣∣2。符号说明:
P
P
P指排列矩阵,
T
T
T指刚性变换,
T
=
{
R
∈
S
O
(
3
)
,
t
∈
R
3
}
T=\{{R\in SO(3)},t \in R^3\}
T={R∈SO(3),t∈R3}。这里还是把L2理解为距离吧。
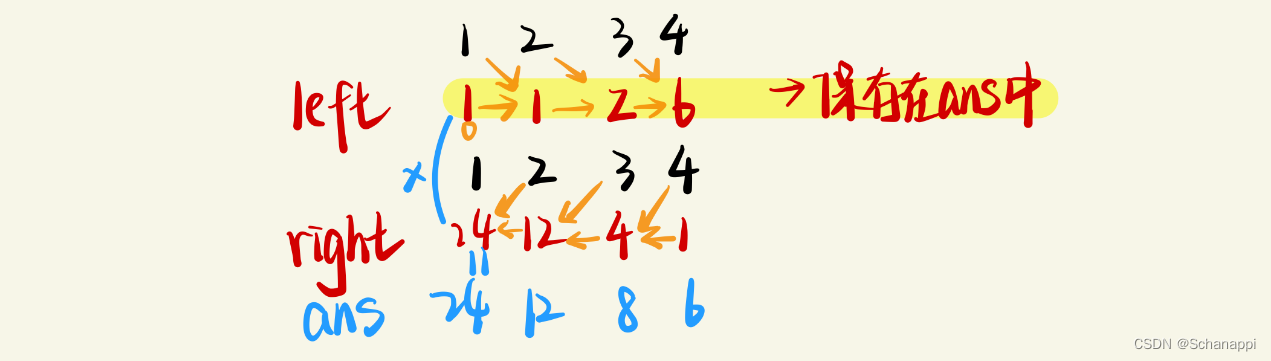
1). 排列矩阵是什么呢?如下一个矩阵便是一个44排列矩阵。表示集合{2,1,4,3}。第n行第m列为1,n在第m个的位置。
[
0
1
0
0
1
0
0
0
0
0
0
1
0
0
1
0
]
\begin{bmatrix}0&1&0&0\\1&0&0&0\\0&0&0&1\\0&0&1&0\end{bmatrix}
0100100000010010
2). 刚性变换是什么呢?在几何学之中表示,使物体的大小形状不变变换。例如,平移,旋转,镜像。
12. 如果两个点集是数量相同的上述公式简化为
d
(
X
,
Y
∣
T
,
P
)
=
1
n
∣
∣
X
−
P
Y
T
T
∣
∣
2
d(X,Y|T,P)=\frac{1}{n}||X-PYT^\mathcal{T}||^2
d(X,Y∣T,P)=n1∣∣X−PYTT∣∣2。符号说明:
T
\mathcal{T}
T是转置。如果两个点集匹配,那么有
d
(
X
,
Y
∣
T
,
P
)
≈
0
d(X,Y|T,P)\approx0
d(X,Y∣T,P)≈0。得出结论:模型进行有效学习应该保持嵌入空间相似距离并且让
d
(
X
,
Y
∣
T
,
P
)
d(X,Y|T,P)
d(X,Y∣T,P)尽量为0。
d
f
(
X
,
Y
∣
T
,
P
)
=
1
n
∣
∣
f
(
X
)
−
f
(
P
Y
T
T
)
∣
∣
2
d_f(X,Y|T,P)=\frac{1}{n}||f(X)-f(PYT^\mathcal{T})||^2
df(X,Y∣T,P)=n1∣∣f(X)−f(PYTT)∣∣2为保持不变性(即让它约为0),
f
f
f应该对排列矩阵刚性变换极不敏感。但原文却说对刚性变换敏感。原文是“Ideally we would like to learn f being invariant to permutations P and as intolerant as possible to rigid transformations T”。还请大佬能够确认。
2. PPF stands for Point Pair Feature。我们对Point Pair Feature进行描述,它是一个4维的描述子。
(
∥
p
j
−
p
i
∥
2
,
∠
(
n
i
,
p
j
−
p
i
)
,
∠
(
n
j
,
p
j
−
p
i
)
,
∠
(
n
i
,
n
j
)
)
(∥p_j−p_i∥^2,∠(n_i,p_j−p_i),∠(n_j,p_j−p_i),∠(n_i,n_j))
(∥pj−pi∥2,∠(ni,pj−pi),∠(nj,pj−pi),∠(ni,nj))符号说明:
P
i
P_i
Pi是点集
X
1
X_1
X1第
i
i
i个点的特征向量,
P
j
P_j
Pj是点集
X
2
X_2
X2第
j
j
j个点的特征向量。
n
n
n指法线。
∣
∣
⋅
∣
∣
||\cdot||
∣∣⋅∣∣维欧几里得空间。
∠
(
v
1
,
v
2
)
=
a
t
a
n
2
(
∣
∣
v
1
×
v
2
∣
∣
,
v
1
⋅
v
2
)
∠(v_1,v_2) = atan2(||v_1\times v_2||,v_1 \cdot v_2)
∠(v1,v2)=atan2(∣∣v1×v2∣∣,v1⋅v2)。
3. 这篇文章受到PointNet启发,鉴于篇幅假定你已经彻底搞懂了PointNet并且知道PointNet能够有效聚合全局信息但是同时难以捕捉局部信息。
流程概述:
1.局部区域点云编码。 先看看图因为图很好理解的。
F
r
F_r
Fr为输入PPFNet的数据。

2.PPFNet的结构。 不难理解不再赘述。

3.N-tuple loss。 这是一个损失函数。如有兴趣建议自行阅读论文这一部分。博主没看因为我受不了。好了给我速速结束这一部分。
代码实操
导库
import torch
from torch.nn import Sequential,Linear,ReLU
from torch_geometric.nn import PPFConv
from torch_cluster import knn_graph
from torch_geometric.nn import global_max_pool
定义PPFNet框架
注意!注意!注意!注意!搭建PPFConv时输入维度必须加4,为什么呢?因为上面理论已经说了。输出维度还是不管你随意吧。
class PPFNet(torch.nn.Module):
def __init__(self):
super().__init__()
mlp1=Sequential(Linear(4,20),ReLU(),Linear(20,24))
self.conv1=PPFConv(mlp1)
mlp2=Sequential(Linear(28,32),ReLU(),Linear(32,32))
self.conv2=PPFConv(mlp2)
self.classifier=Linear(32,40)
def forward(self,pos,normal,batch):
edge_index=knn_graph(pos,k=16,batch=batch,loop=False)
x=self.conv1(x=None,pos=pos,normal=normal,edge_index=edge_index)
x=x.relu()
x=self.conv2(x=x,pos=pos,normal=normal,edge_index=edge_index)
x=x.relu()
x=global_max_pool(x,batch)
return self.classifier(x)
model = PPFNet()
print(model)
#输出如下:
#PPFNet(
# (conv1): PPFConv(local_nn=Sequential(
# (0): Linear(in_features=4, out_features=20, bias=True)
# (1): ReLU()
# (2): Linear(in_features=20, out_features=24, bias=True)
# ), global_nn=None)
# (conv2): PPFConv(local_nn=Sequential(
# (0): Linear(in_features=28, out_features=32, bias=True)
# (1): ReLU()
# (2): Linear(in_features=32, out_features=32, bias=True)
# ), global_nn=None)
# (classifier): Linear(in_features=32, out_features=40, bias=True)
#)
导库
from torch_geometric.transforms import Compose, RandomRotate,SamplePoints
定义旋转操作
random_rotate = Compose([
RandomRotate(degrees=180, axis=0),
RandomRotate(degrees=180, axis=1),
RandomRotate(degrees=180, axis=2),
])
test_transform = Compose([
random_rotate,
SamplePoints(num=128, include_normals=True),
])
导库,导入数据数据变换,训测拆分打乱顺序
from torch_geometric.datasets import GeometricShapes
from torch_geometric.loader import DataLoader
train_dataset=GeometricShapes(root='/DATA/GeometricShapes',train=False,transform=SamplePoints(128,include_normals=True))
test_dataset=GeometricShapes(root='/DATA/GeometricShapes',train=False,transform=test_transform)
train_loader=DataLoader(train_dataset,batch_size=10,shuffle=True)
test_loader=DataLoader(test_dataset,batch_size=10)
jupyter nootbook内的输出如下

历史遗留问题
上篇文章我们使用K最邻近算法构边建图,好像这篇文章也是K最邻近算法构边建图。PointNet++那一篇文章指出这样不好(数据不均匀效果就不好,主观很好理解)。所以使用FPS算法来寻找质心克服问题。简单来说1.开始随便找个质心2.质心张开一个固定半径邻域3.再在剩下所有点内(质心以及质心邻域内的不算)寻找到离所有质心最远的点成为下个质心4迭代直到没有点了。
开摆
import matplotlib.pyplot as plt
def visualize_points(pos,edge_index=None,index=None):
fig=plt.figure(figsize=(4, 4))
if edge_index is not None:
for (src,dst) in edge_index.t().tolist():
src=pos[src].tolist()
dst=pos[dst].tolist()
plt.plot([src[0],dst[0]],[src[1],dst[1]],linewidth=1,color='black')
if index is None:
plt.scatter(pos[:,0],pos[:,1],s=50,zorder=1000)
else:
mask=torch.zeros(pos.size(0),dtype=torch.bool)
mask[index]=True
plt.scatter(pos[~mask,0],pos[~mask,1],s=50,color='lightgray',zorder=1000)
plt.scatter(pos[mask,0],pos[mask,1],s=50,zorder=1000)
plt.axis('off')
plt.show()
from torch_cluster import fps
dataset=GeometricShapes(root='/DATA//GeometricShapes',transform=SamplePoints(128))
data=dataset[0]
index=fps(data.pos,ratio=0.25)
visualize_points(data.pos)
visualize_points(data.pos,index=index)
jupyter notebook内的输出如下

唯独这篇,点个赞吧,累麻