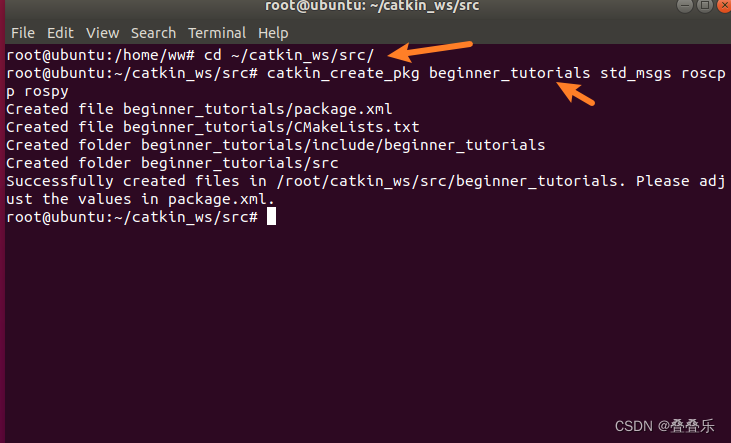
执行命令
cd ~/catkin_ws/src/
catkin_create_pkg beginner_tutorials std_msgs roscpp rospy
进入刚刚那个功能包begineer什么的
cd beginner_tutorials/mkdir msg
echo "int64 num" > msg/num.msg
然后添加如下代码,按i 然后输入
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>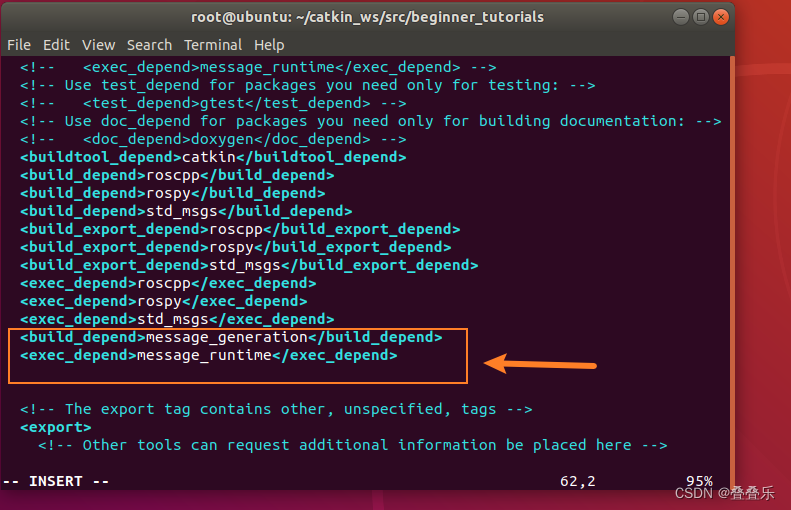
然后按esc 然后输入:wq 保存退出
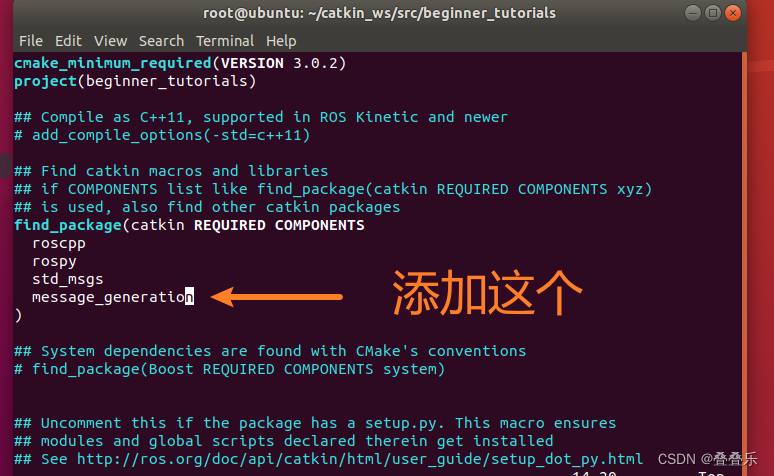
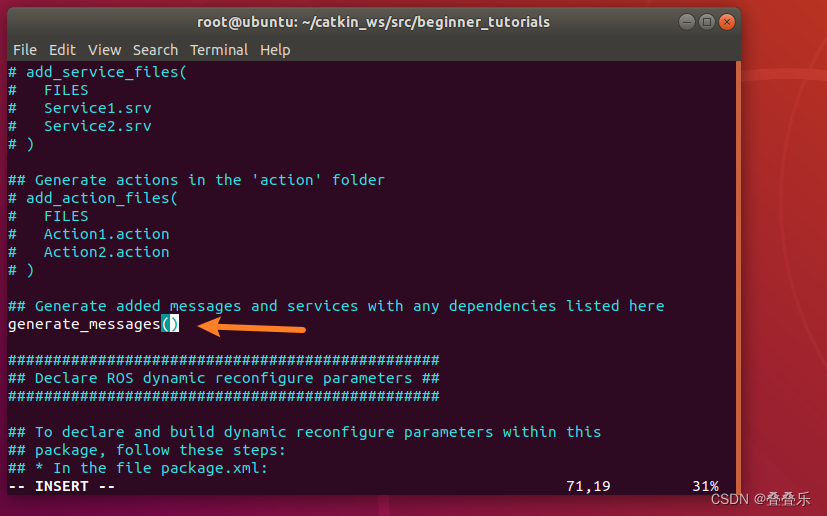
然后再编辑CMakeLists.txt 文件
message_generation
然后在命令模式下(多按Esc键),输入/add_mess 然后回车 就像这样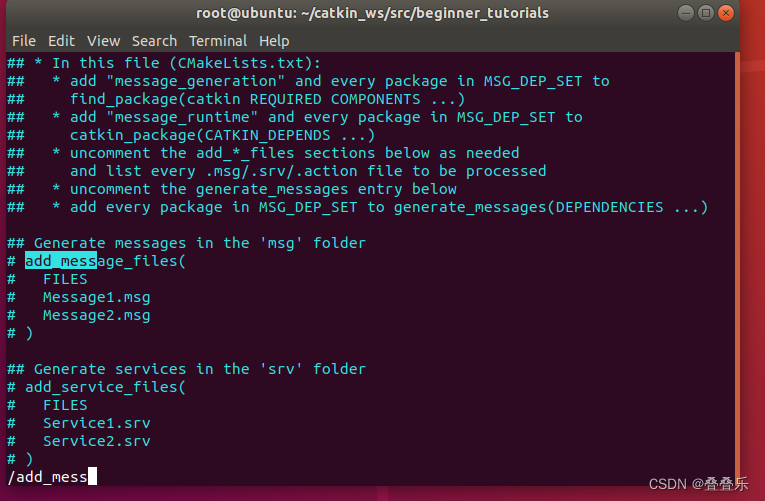
在这里修改成这样
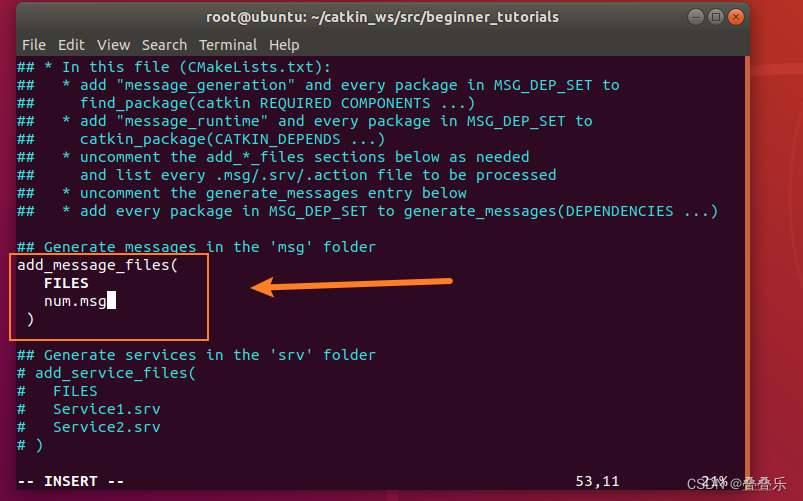
然后继续修改
修改成这样:
然后按Esc 然后输入:wq 保存退出
然后执行命令,回到工作空间目录,下面图片的命令
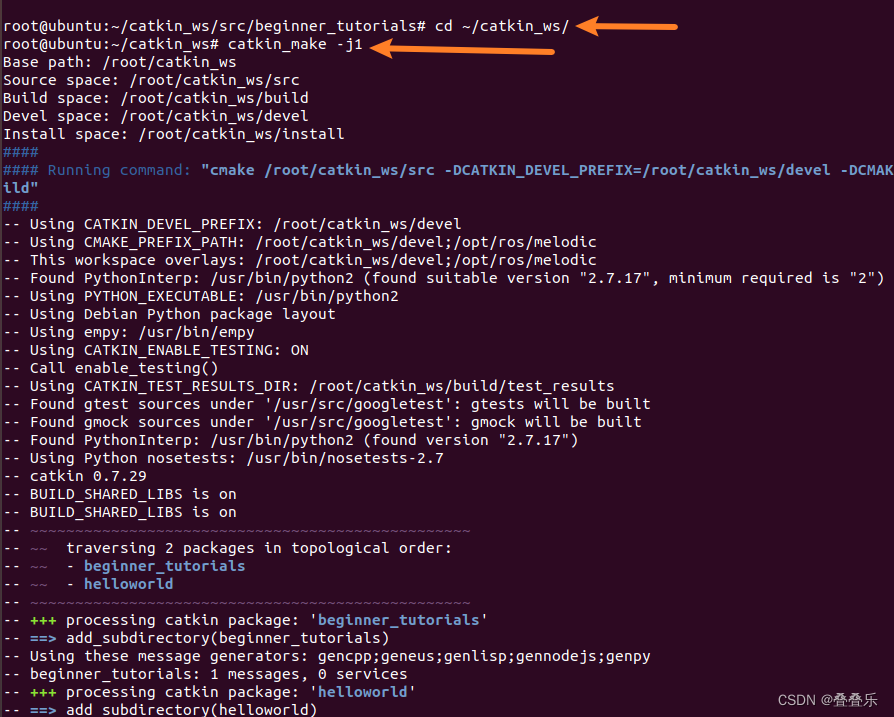
编译成功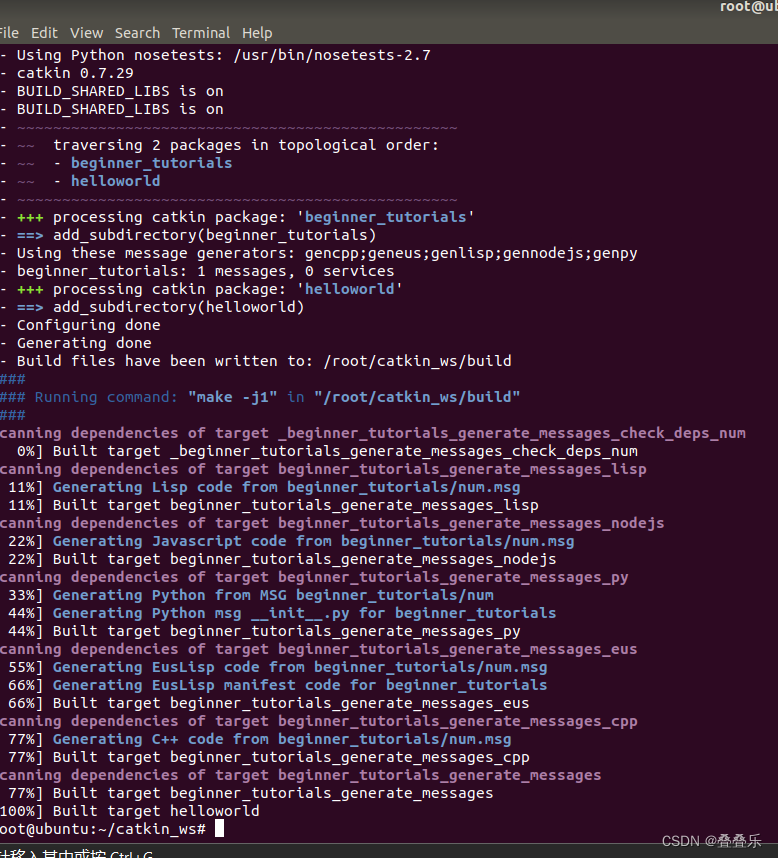
然后输入命令
rosmsg show beginner_tutorials/num效果如下:

以上我们创建一个msg 信息就成功了,下面我们创建srv 服务
我们执行一下catkin_ws目录下执行
catkin_make
然后退出终端,重新进一次,执行一下命令 按tab键可以补全,然后回车
roscd beginner_tutorials/
执行
mkdir srv
然后执行命令
roscp rospy_tutorials AddTwoInts.srv srv/AddTwoInts.srv
然后编辑CMakeLists.txt 文件
vim CMakeLists.txt
效果如下内容,改成这样
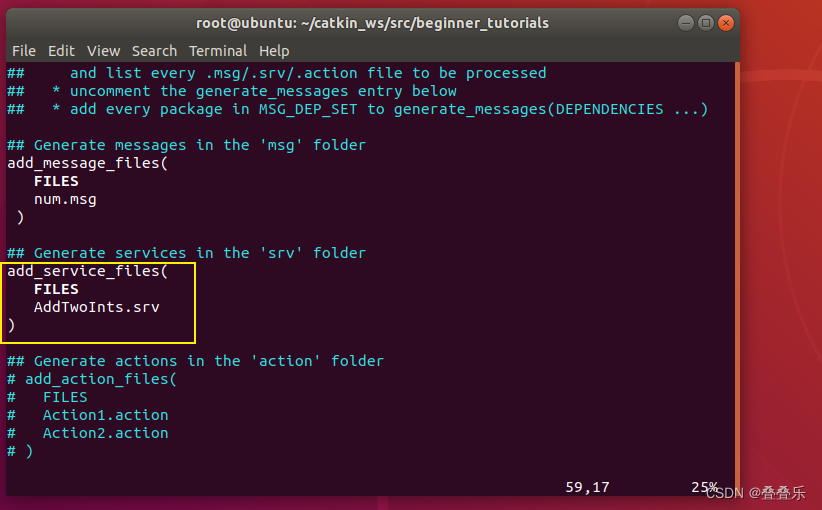
然后按esc 然后输入:wq 保存退出
执行命令:
cd ~/catkin_ws/ && catkin_make -j1
如图: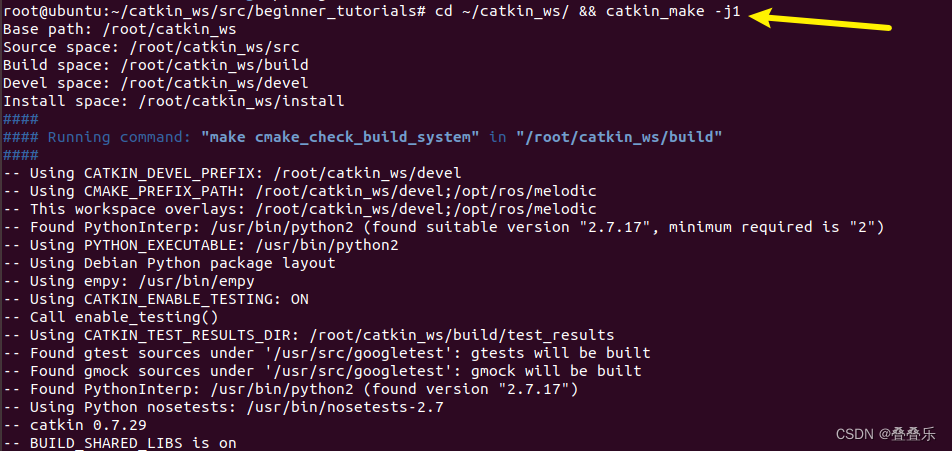
执行命令:
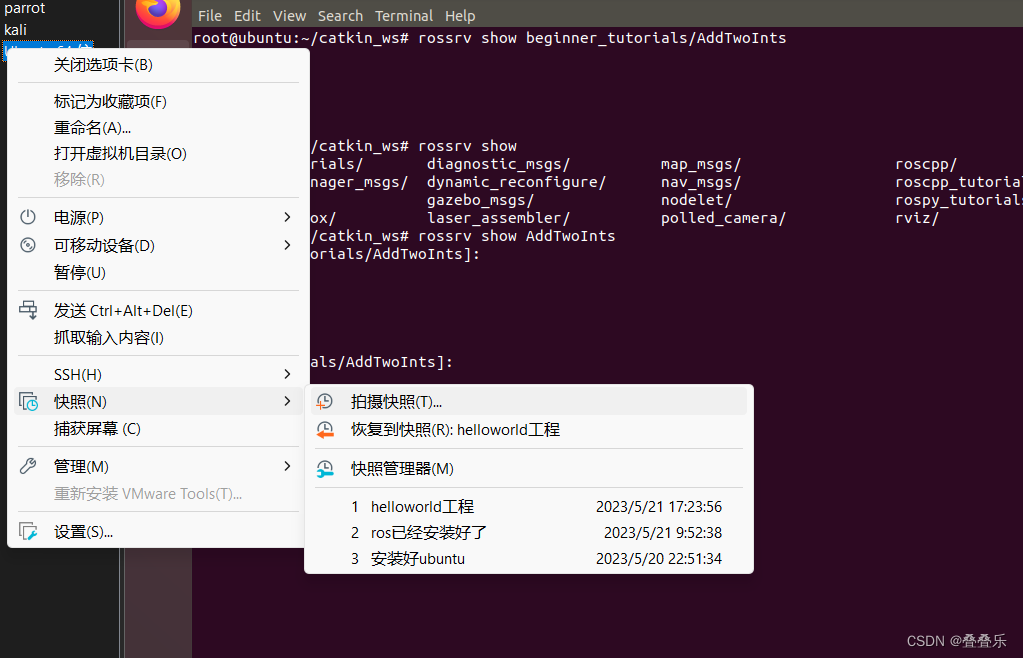
rossrv show beginner_tutorials/AddTwoInts效果: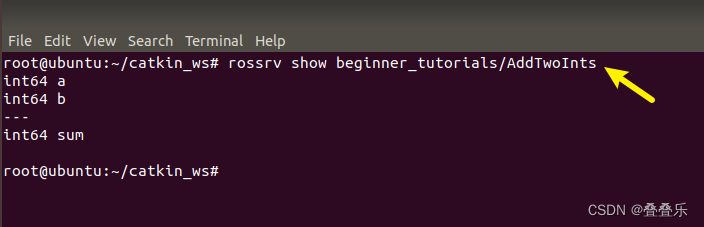
也可以这样
rossrv show AddTwoInts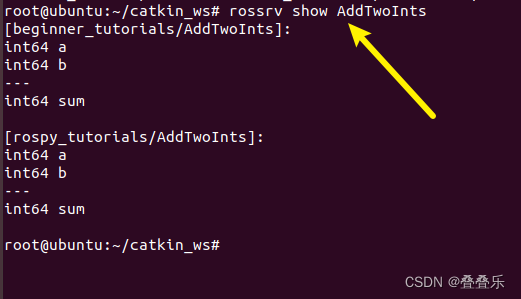
到此我们学会了如何创建消息与服务,掌握节点,消息的联系。
然后继续vm虚拟机创建快照,记录本次成功创建的信息,后面如果配置错误,可以恢复到这个时候,继续操作