相关工具,以及镜像(以后有用)
链接:https://pan.baidu.com/s/1xgtp-XGFFNCACV_-0TJO2A
提取码:ar1w
1. 下载vm虚拟机(我选择的官方最新的vm虚拟机),安装好
2.安装百度网盘里面的ubuntu镜像 18版本的

然后下面没有什么好说的,会装镜像就会,不会的自己去搜索这么装镜像的吧。这真没有什么好说的。
后面配置,设置自己弄吧。一直弄好为止。这都不会,我也没有办法,找其他的文章如何安装吧。
安装好后的样子:
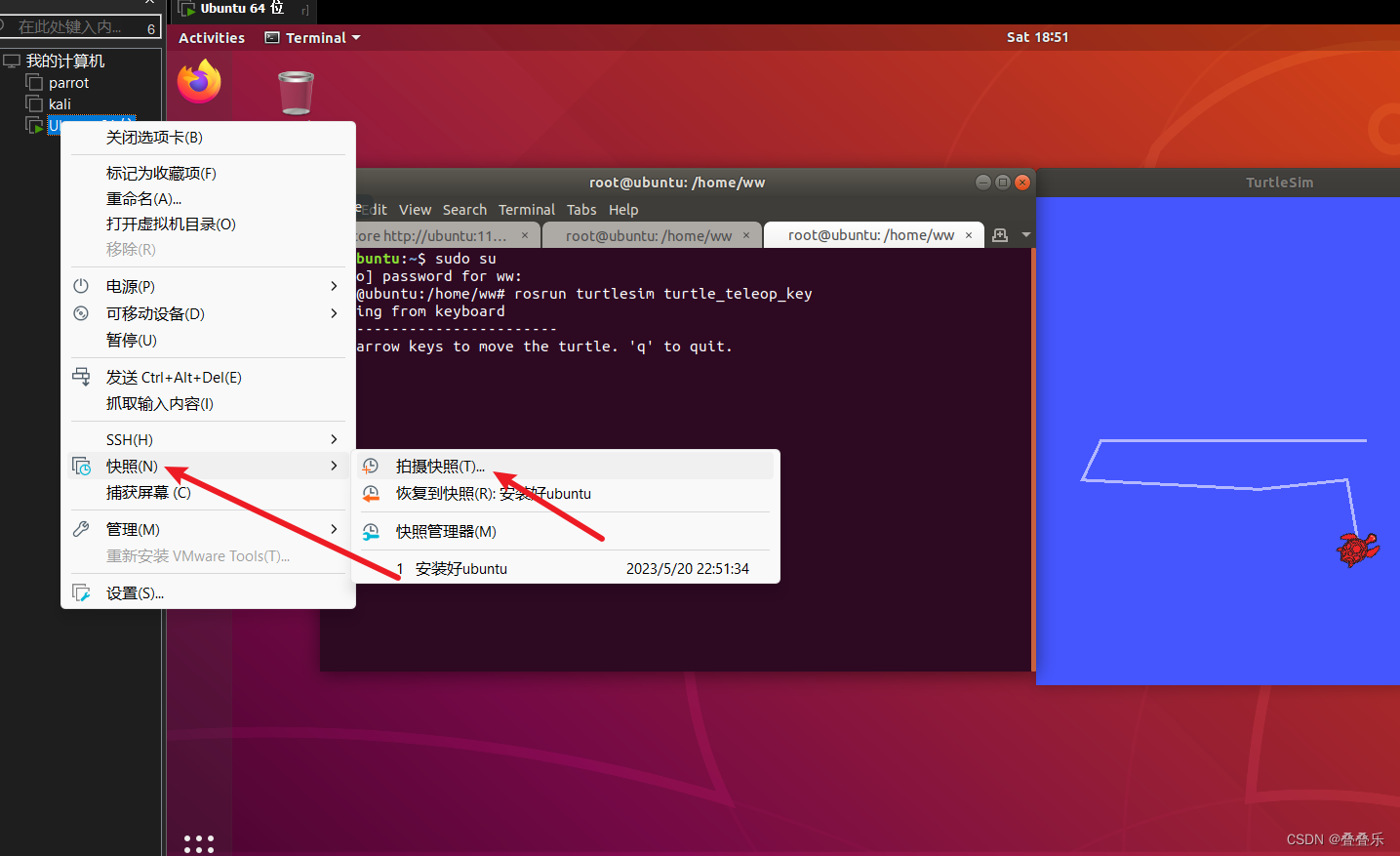
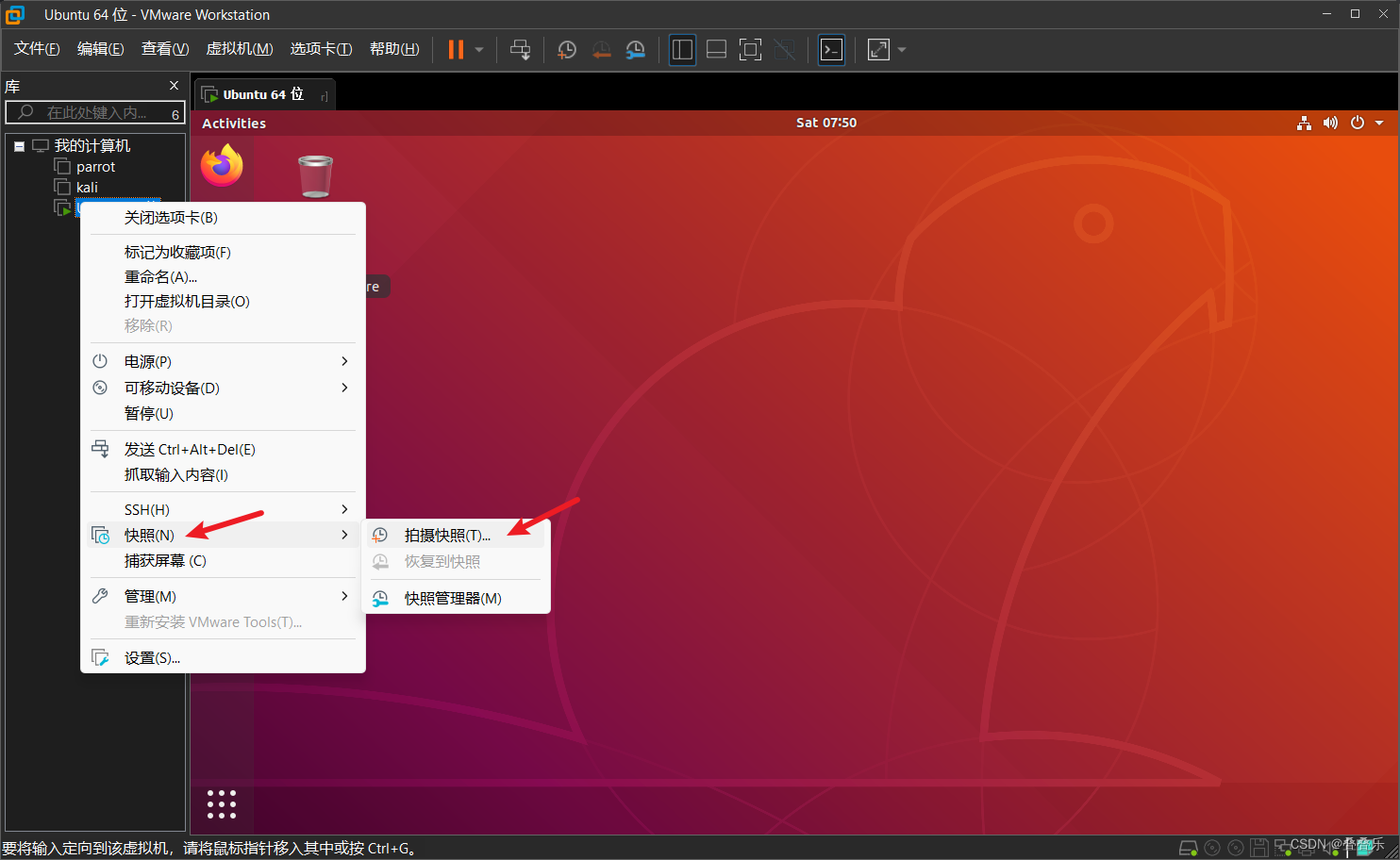
然后右键:点拍摄快照,如果后面弄坏虚拟机,恢复快照就可以回到现在的 这个样子
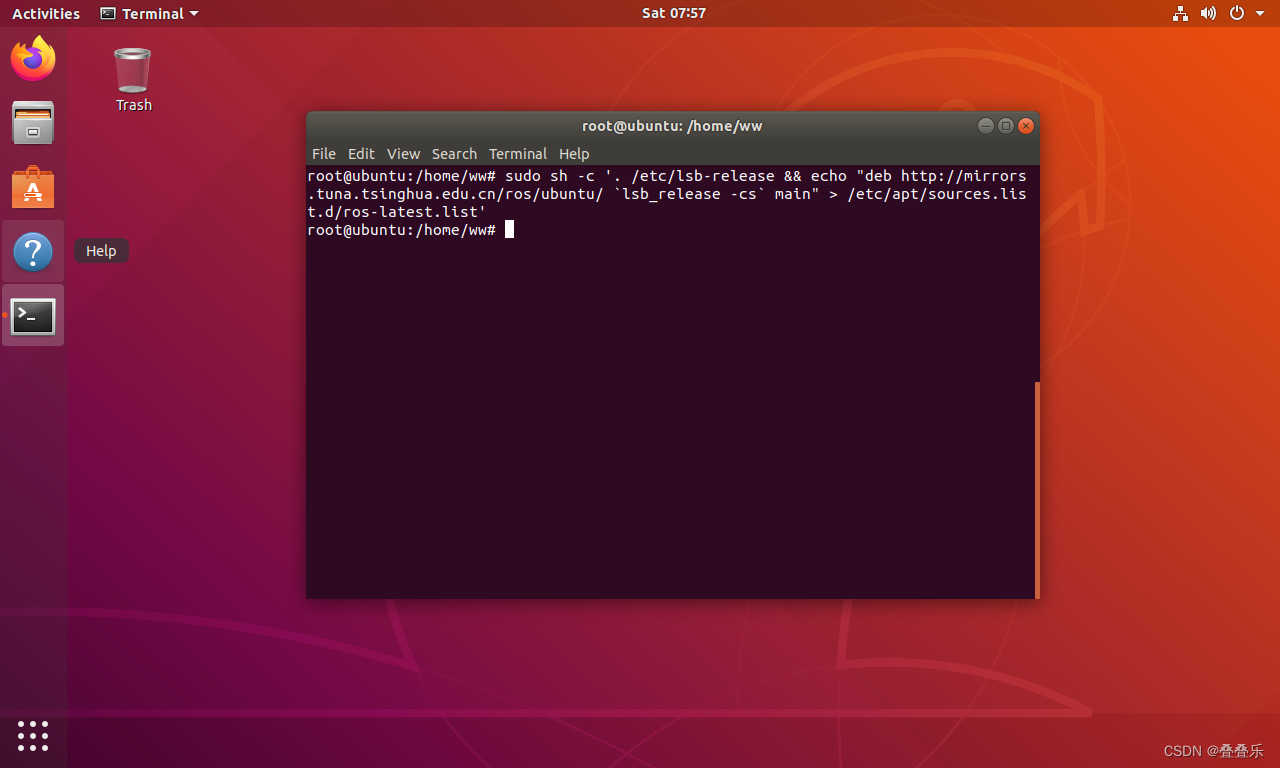
然后我们打开一个终端输入命令:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
命令解释:
这是一个在Unix/Linux终端中的命令,用于向系统的软件包管理器添加一个新的软件包源,特别是用于机器人操作系统(ROS)的软件包源。以下是该命令及其参数的解释:
sudo:该命令使用管理员权限运行后续命令,这是修改系统文件和目录所必需的。
sh -c:告诉终端将后续命令作为shell脚本运行,-c选项表示该命令应被视为单个参数。
'. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/lsb_release -csmain" > /etc/apt/sources.list.d/ros-latest.list':这是实际运行的命令,它执行以下操作:
- 前半部分
'. /etc/lsb-release &&',会读取/etc/lsb-release文件并设置与系统Linux发行版相关的环境变量。- 后半部分
echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/lsb_release -csmain" > /etc/apt/sources.list.d/ros-latest.list',创建一个名为ros-latest.list的新文件,并在该文件中写入一行包含ROS软件包源URL的内容,该URL是针对与从lsb_release -cs命令获取的系统发行版代号匹配的Ubuntu发行版的。echo命令将字符串"deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/lsb_release -csmain"写入该文件,这是APT软件包源行的有效格式。总之,该命令用于向系统的软件包管理器添加一个新的ROS软件包源,允许用户从该软件包源安装和更新ROS软件包。
sudo命令用于确保该命令具有必要的权限来修改系统文件,而sh -c命令用于在终端中作为shell脚本运行该命令。
继续执行以下命令:
sudo apt-key adv --keyserver 'hkp://pgp.mit.edu:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
效果:

命令解释:
这是一个在Unix/Linux终端中的命令,用于将公钥添加到系统的APT密钥环中,以便验证从该公钥签名的软件包。以下是该命令及其参数的解释:
sudo:该命令使用管理员权限运行后续命令,这是修改系统文件和目录所必需的。apt-key:这是一个APT密钥管理器的命令,用于管理系统的密钥环。adv:这是一个选项,允许传递高级选项给APT密钥管理器。--keyserver 'hkp://pgp.mit.edu:80':这是一个选项,指定从哪个密钥服务器获取公钥。在这种情况下,它指定从MIT PGP Key Server获取公钥,hkp是指定密钥服务器协议的选项,pgp.mit.edu是指定密钥服务器的主机名或IP地址,80是指定密钥服务器的端口号。--recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654:这是一个选项,用于指定要添加到密钥环中的公钥的ID。在这种情况下,它指定了ROS软件包仓库的公钥ID。因此,这个命令的作用是从MIT PGP Key Server获取ROS软件包仓库的公钥,并添加到系统的APT密钥环中,以便在安装或更新ROS软件包时验证软件包的签名。
sudo命令用于确保该命令具有必要的权限来修改系统文件,而apt-key命令则允许管理系统的密钥环。
然后再执行:
sudo apt-get update
sudo apt-get install ros-melodic-desktop-full效果:
等2000年吧,要梯子更快,因为那个文档就是用的外国的链接,只有软件是国内的
终于安装好了。2个小时
然后执行命令:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrcsource ~/.bashrc这个命令的含义是将ROS(Robot Operating System)的Melodic版本的
setup.bash文件添加到当前用户的.bashrc文件中。具体来说,该命令的作用是向
~/.bashrc文件中添加一行文本,即source /opt/ros/melodic/setup.bash。这个文本行的含义是在bash shell启动时自动执行ROS Melodic的setup.bash文件,从而设置ROS环境变量和其他必要的配置。通过将
source /opt/ros/melodic/setup.bash添加到.bashrc文件中,您可以确保每次打开新的终端窗口或会话时,ROS环境变量和配置都会自动设置,而无需手动输入命令。需要注意的是,该命令假定您已经在系统中安装了ROS Melodic,并且
/opt/ros/melodic/setup.bash路径正确。如果您使用的是其他版本的ROS或其他路径,请相应地修改该命令中的路径和版本号。
效果:
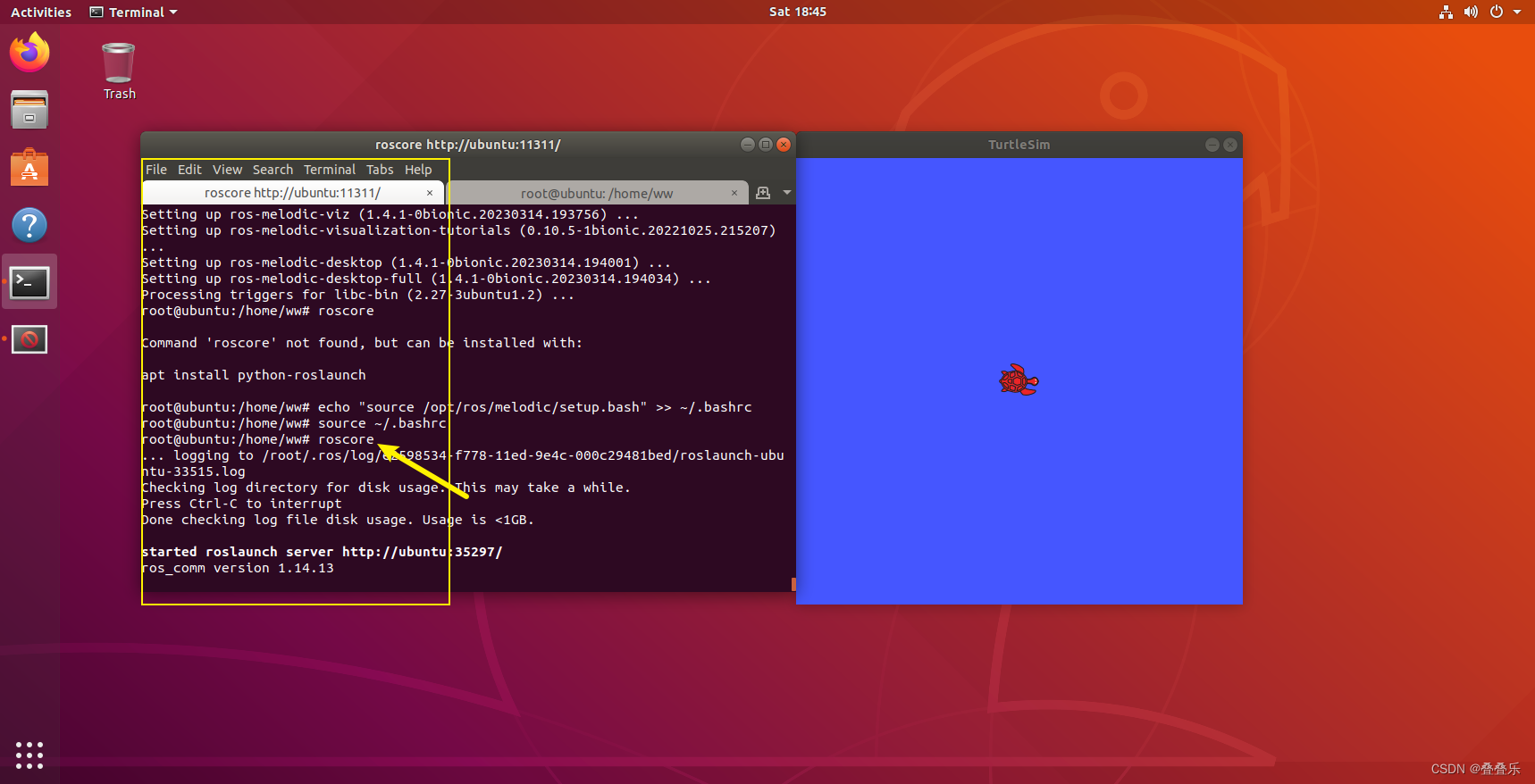
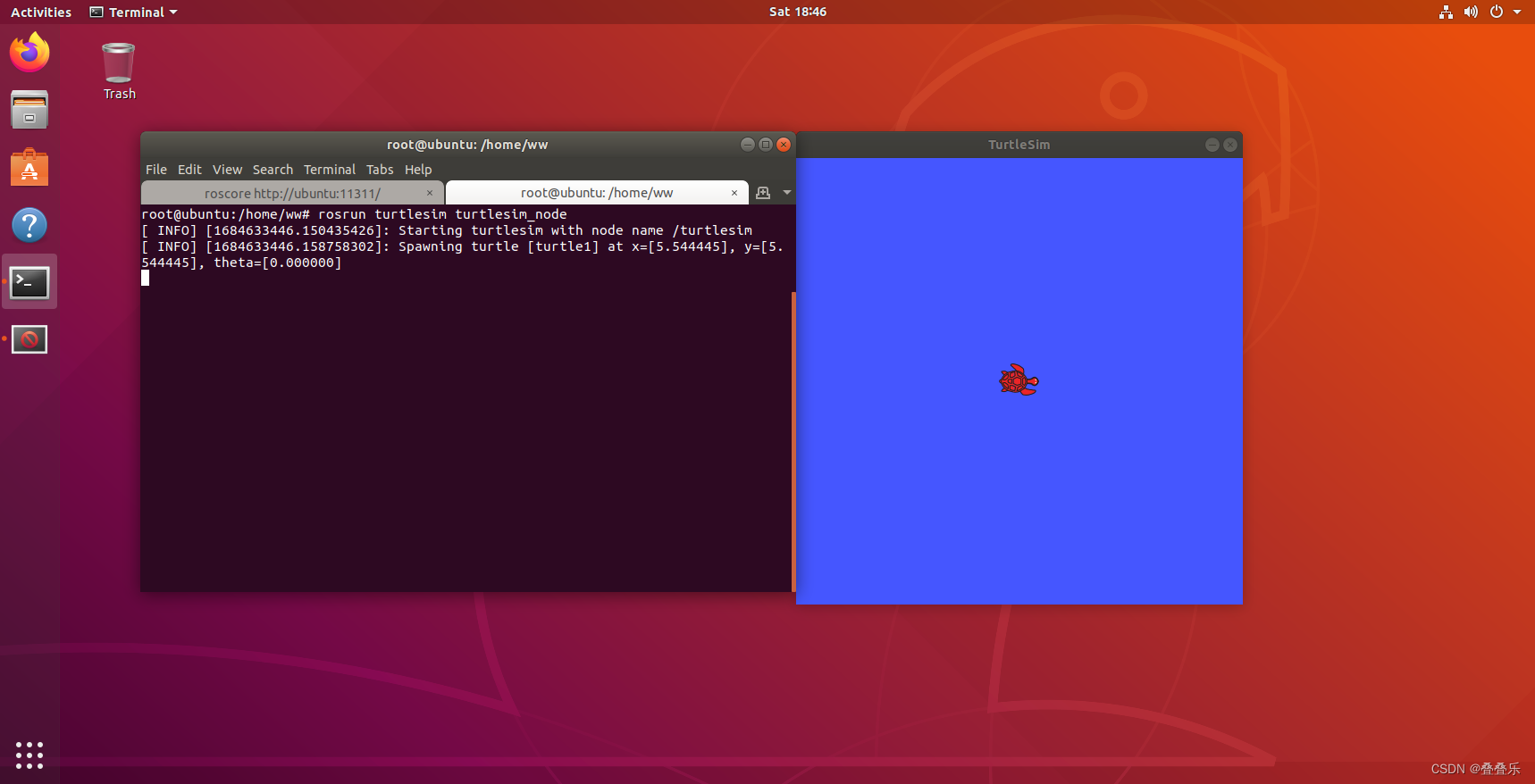
两个终端分别运行:
roscorerosrun turtlesim turtlesim_node效果:
然后再开一个终端 :
rosrun turtlesim turtle_teleop_key 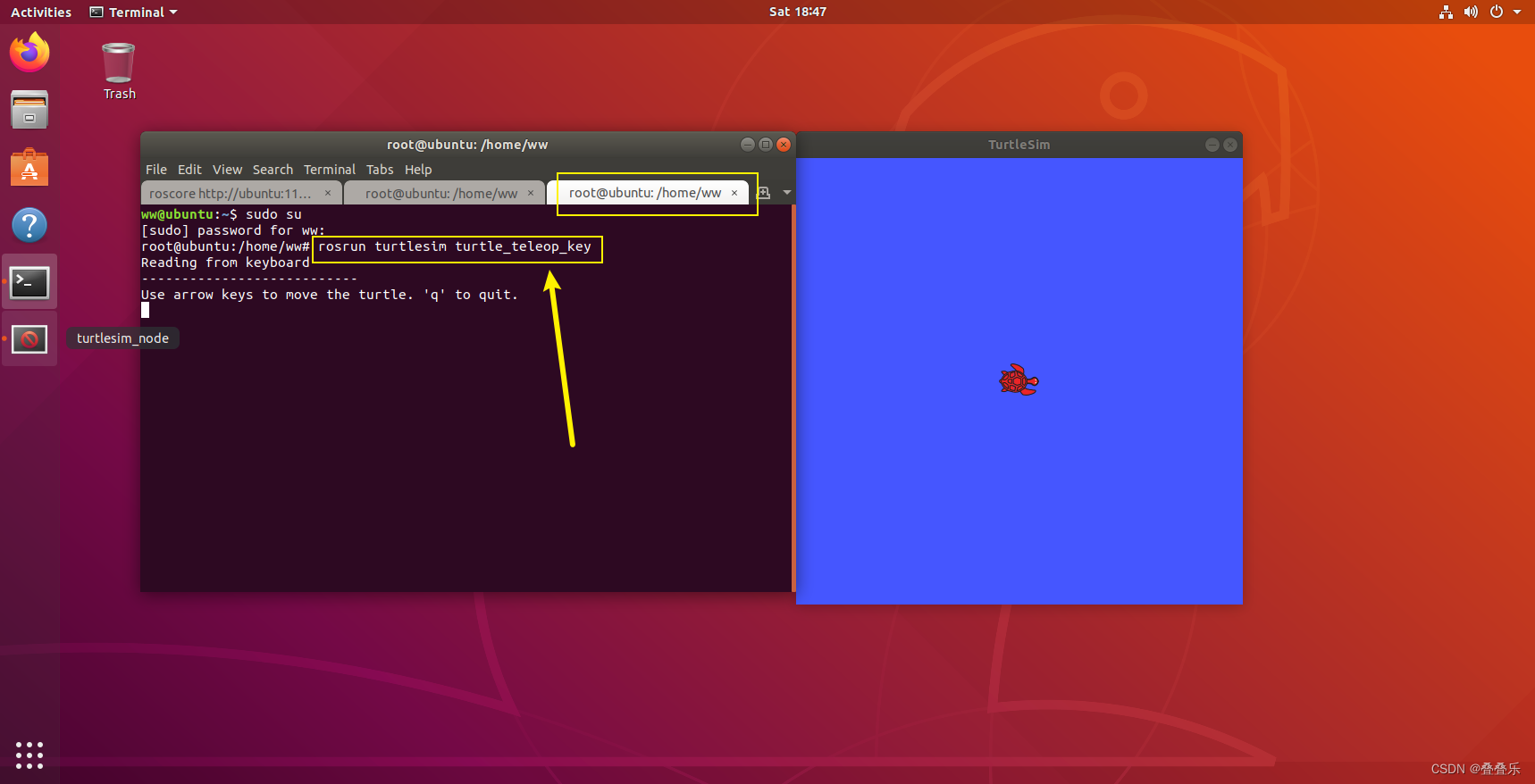
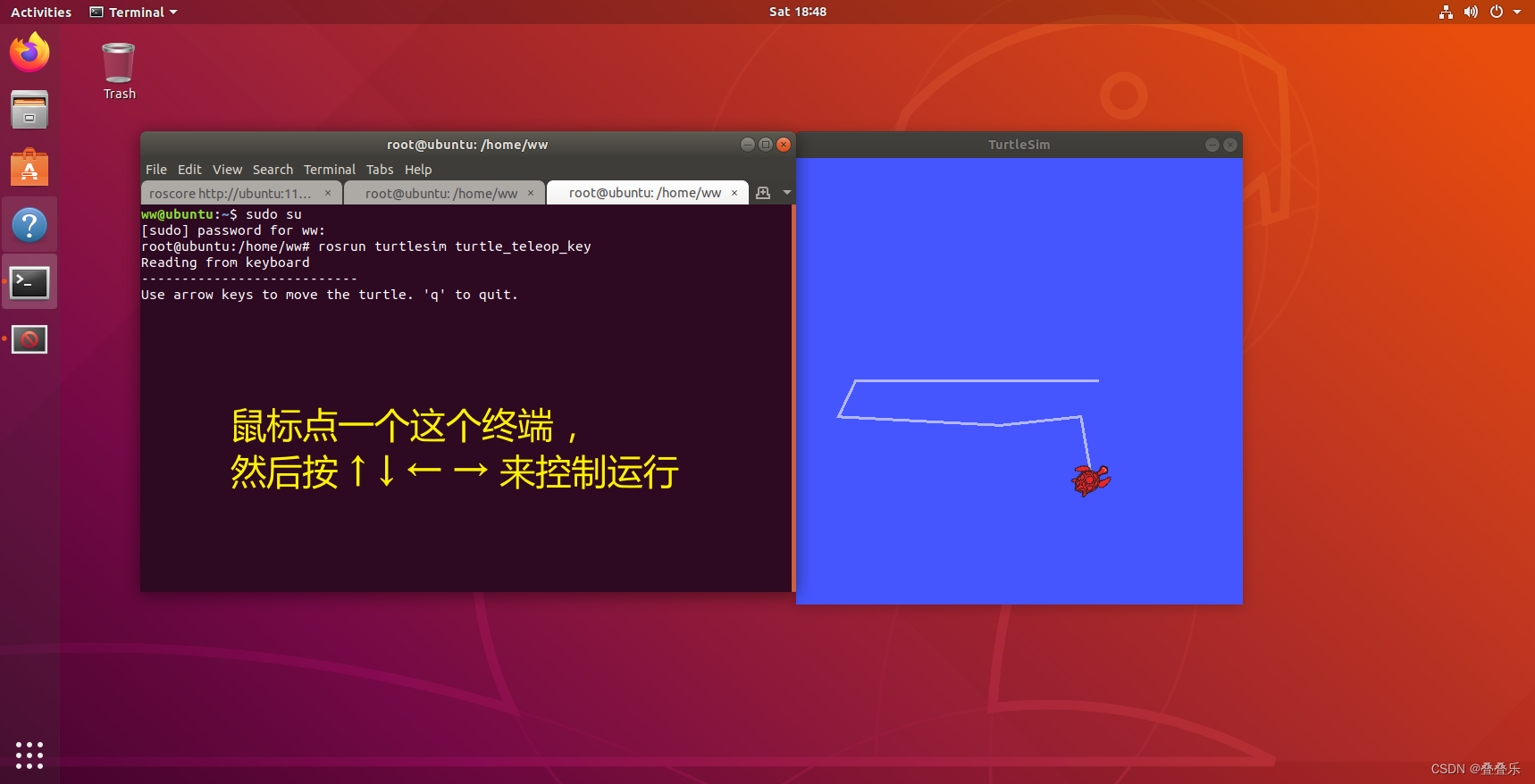
然后我们像刚刚那样再创建一个虚拟机快照,这样以后我们系统有问题,我们可以恢复到这里已经安装好了的ros的系统了。