pg中的快照
快照(snapshot)是记录数据库当前瞬时状态的一个数据结构。pg数据库的快照保存当前所有活动事务的最小事务ID、最大事务ID、当前活跃事务列表、当前事务的command id等
快照数据保存在SnapshotData结构体类型中,源码src/include/utils/snapshot.h
typedef struct SnapshotData
{
SnapshotType snapshot_type; /* 快照类型 */
TransactionId xmin; /* 事务ID小于xmin,对于快照可见 */
TransactionId xmax; /* 事务ID大于xmax,对于快照不可见 */
/* 获取快照时活跃事务列表。该列表仅包括xmin与xmax之间的txid */
TransactionId *xip;
uint32 xcnt; /* xip_list保存在xip[] */
/* 获取快照时活跃子事务列表 */
TransactionId *subxip;
int32 subxcnt; /* 子事务保存在subxip[] */
bool suboverflowed; /* 子事务是否溢出,子事务较多时会产生溢出 */
bool takenDuringRecovery; /* 是否是恢复快照recovery-shaped snapshot? */
bool copied; /* 这里应该是快照是否是copy的(可重复读和串行化隔离级别,会copy快照)false if it's a static snapshot */
CommandId curcid; /* 事务中的command id,CID< curcid的可见 */
...
TimestampTz whenTaken; /* 生成快照的时间戳 */
XLogRecPtr lsn; /* 生成快照的LSN */
} SnapshotData;
typedef struct SnapshotData *Snapshot;
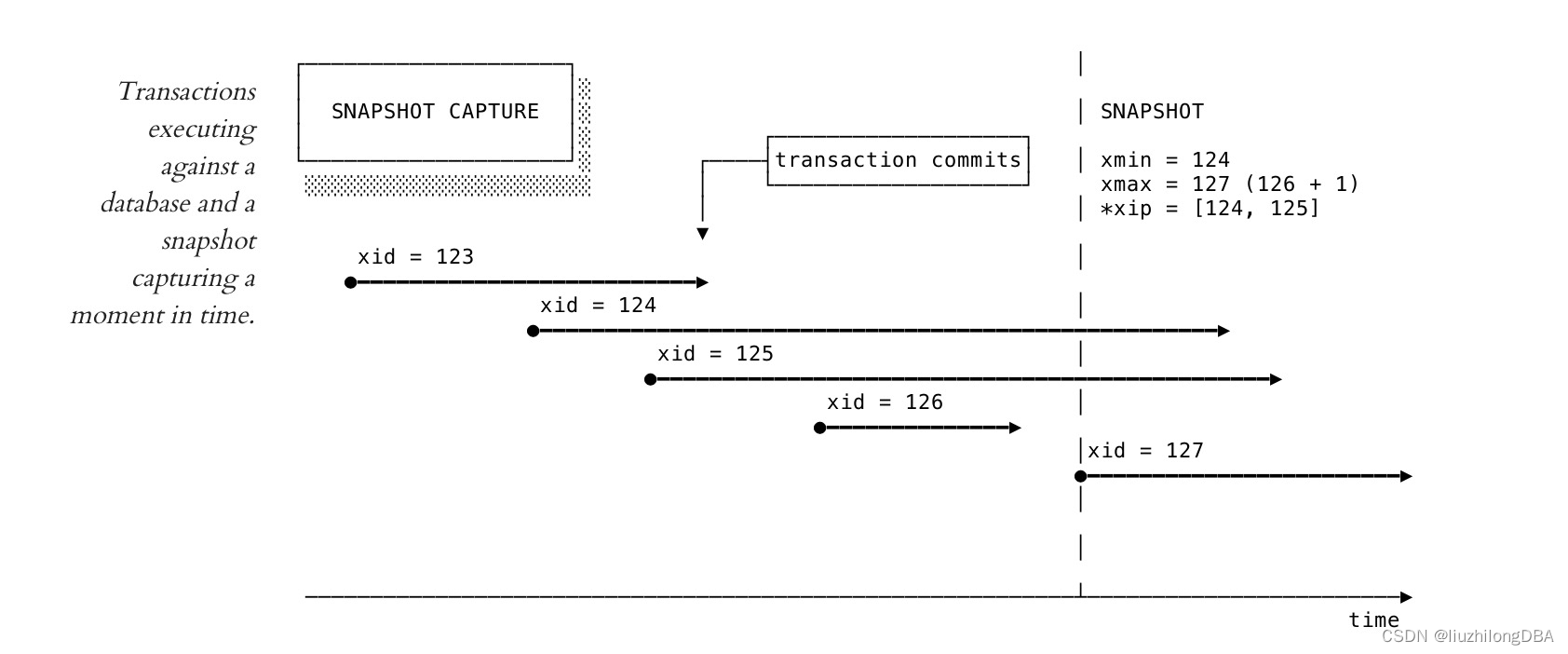
快照中最重要的信息是xmin、xmax、xip_list。通过pg_current_snapshot()(pg12及以前用 txid_current_snapshot () )显示当前事务的快照。
注意区分快照xmin、xmax跟元组上的xmin、xmax,含义是不一样的。
lzldb=*# select pg_current_snapshot();
pg_current_snapshot
---------------------
100:104:100,102
| xmin | 最早活跃的txid,所有比他更早的事务txid<xmin,要么提交和可见,要么回滚并成为死元组 |
|---|---|
| xmax | 第一个尚未分配的txid,xmax=latestCompletedXid+1,所有txid>=xmax的事务都未启动并对当前快照不可见 |
| xip_list | xip_list存储在数组xip[]中。因为所有事务开始顺序性和完成顺序不一定是一致的,晚开始的事务可能早完成,所以只有xmin和xmax不能完全表达获取快照时的所有活动事务。xip_list保存获得快照时的活动事务 |
快照类型
除了mvcc快照以外,pg在src/include/utils/snapshot.h中还定义了一些其他的快照类型
typedef enum SnapshotType
{
/* 当且仅当元组符合mvcc快照可见规则时,元组可见
* 最重要的一种快照事务,是pg用来实现mvcc的快照类型
* 元组可见性基于事务快照的xmin,xmax,xip_list,curcid等信息进行判断
* 如果命令发生了数据变更,当前mvcc快照是看不到的,需要再生成mvcc快照
*/
SNAPSHOT_MVCC = 0,
/* 元组上的事务已提交,则可见
* 进行中的事务不可见
* 命令发生了数据变更,当前self快照可以看见
*/
SNAPSHOT_SELF,
/*
* 任何元组都可见
*/
SNAPSHOT_ANY,
/*
* toast重要是有效的就可见。toast可见性依赖主表的元组可见性
*/
SNAPSHOT_TOAST,
/*
* 命令发生了数据变更,当前dirty快照可以看见
* dirty快照会保存当前进行中元组的版本信息
* 快照xmin会设置成其他进行中事务的元组xmin,xmax类似
*/
SNAPSHOT_DIRTY,
/* HISTORIC_MVCC快照规则与MVCC快照一致,用于逻辑解码
*/
SNAPSHOT_HISTORIC_MVCC,
/*
判断死元组是否对一些事务可见
*/
SNAPSHOT_NON_VACUUMABLE
} SnapshotType;
快照与隔离级别
不同的隔离级别,快照获取方式是不一样的
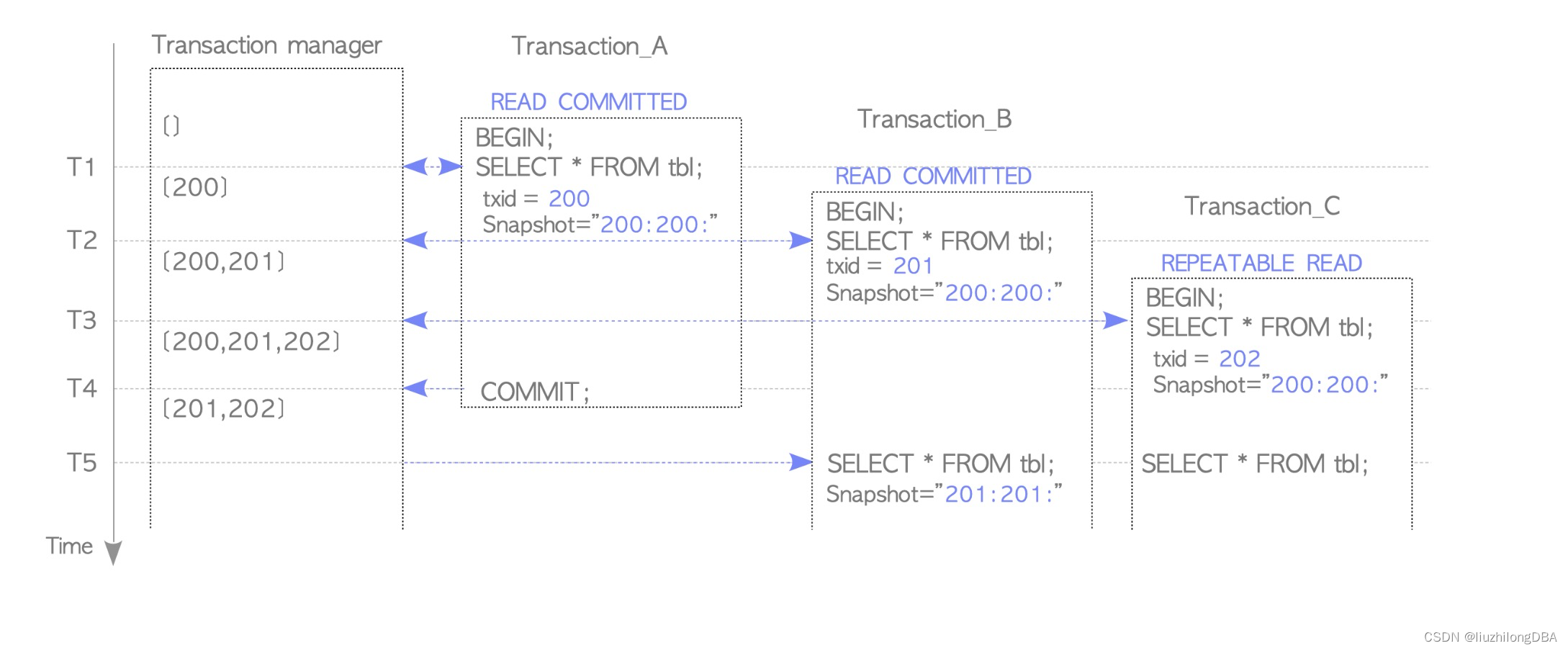
rc模式需要事务中的每个sql都获得快照,而rr模式在事务中只使用一个快照。获得快照的方法在GetTransactionSnapshot()函数中。
进程上的事务结构体
pg在获得快照数据的时候,需要检索所有backend进程的事务状态。
所以在理解获得快照数据函数GetSnapshotData()之前,需要先理解几个在关于backend process的结构体。这些结构体包括PGPROC、PGXACT、PROC_HDR(PROCGLOBAL)、ProcArray
这些process相关结构体包含一些进程、锁等信息,这里只研究process里事务相关的信息。源码以pg13源码为示例
PGPROC结构体
源码src/include/storage/proc.h
//每个backend进程在内存中都存储PGPROC结构体
//可以理解为backend进程的主结构体
struct PGPROC
{
...
LocalTransactionId lxid; /* local id of top-level transaction currently
* being executed by this proc, if running;
* else InvalidLocalTransactionId */
...
struct XidCache subxids; /* 缓存子事务XIDs */
...
/* clog组事务状态更新 */
bool clogGroupMember; /* 当前proc是否使用clog组提交 */
pg_atomic_uint32 clogGroupNext; /* 原子int,指向下一个组成员proc */
TransactionId clogGroupMemberXid; /* 当前要提交的xid */
XidStatus clogGroupMemberXidStatus; /* 当前要提交xid的状态 */
int clogGroupMemberPage; /* 当前要提交xid属于哪个page*/
XLogRecPtr clogGroupMemberLsn; /* 当前要提交的xid的commit日志的lsn号 */
};
/* NOTE: "typedef struct PGPROC PGPROC" appears in storage/lock.h. 居然不跟结构体写在一起*/
PGXACT结构体
//在9.2以前,PGXACT的信息在PGPROC中,由于压测显示在多cpu系统中,因为减少了获取的缓存行数,把两者分开GetSnapshotData会更快,
typedef struct PGXACT
{
TransactionId xid; /* id of top-level transaction currently being
* executed by this proc, if running and XID
* is assigned; else InvalidTransactionId */
// 看上是当前进程的xmax
TransactionId xmin; /* 不包括lazy vaccum,事务开始时最小xid,vacuum无法删除xid >= xmin的元组*/
uint8 vacuumFlags; /* vacuum-related flags, see above */
bool overflowed; //PGXACT是否溢出
uint8 nxids;
} PGXACT;
能看出pgxact保存的信息比较简单,是backend的xmin、xmax等事务相关信息。而pgproc更倾向于保存backend的基本信息,pgproc中还是有一部分不太频繁调用的事务信息,不过最核心的进程事务信息在pgxact中
PROC_HDR(PROCGLOBAL)结构体
每个backend process都有proc结构体,很明显在高并发场景下扫描所有proc寻找事务信息比较耗时,这时需要一个实例级别的结构体存储所有proc信息,这个结构体就是PROCGLOBAL**。**
源码一般用结构体类型PROC_HDR定义结构体指针指向PROCGLOBAL。PROC_HDR存储的是全局的proc信息,所有proc数组列表、空闲proc等等
源码位置src/include/storage/proc.h
typedef struct PROC_HDR
{
/* pgproc数组 (not including dummies for prepared txns) */
PGPROC *allProcs;
/* pgxact数组 (not including dummies for prepared txns) */
PGXACT *allPgXact;
...
/* Current shared estimate of appropriate spins_per_delay value */
int spins_per_delay;
/* The proc of the Startup process, since not in ProcArray */
PGPROC *startupProc;
int startupProcPid;
/* Buffer id of the buffer that Startup process waits for pin on, or -1 */
int startupBufferPinWaitBufId;
} PROC_HDR;
PROCARRAY结构体
procarray在procarray.c中,procarray.c是维护所有backend的PGPROC和PGXACT结构的。
源码位置src/backend/storage/ipc/procarray.c
typedef struct ProcArrayStruct
{
int numProcs; /* proc的个数*/
int maxProcs; /* proc array的大小 */
//处理已分配的xid
int maxKnownAssignedXids; /* allocated size of array */
int numKnownAssignedXids; /* current # of valid entries */
int tailKnownAssignedXids; /* index of oldest valid element */
int headKnownAssignedXids; /* index of newest element, + 1 */
slock_t known_assigned_xids_lck; /* protects head/tail pointers */
/*
* Highest subxid that has been removed from KnownAssignedXids array to
* prevent overflow; or InvalidTransactionId if none. We track this for
* similar reasons to tracking overflowing cached subxids in PGXACT
* entries. Must hold exclusive ProcArrayLock to change this, and shared
* lock to read it.
*/
TransactionId lastOverflowedXid;
/* oldest xmin of any replication slot */
TransactionId replication_slot_xmin;
/* oldest catalog xmin of any replication slot */
TransactionId replication_slot_catalog_xmin;
/* pgprocnos,相当于allPgXact[]数组下标,可用于检索allPgXact[],该数组有PROCARRAY_MAXPROCS条目 */
int pgprocnos[FLEXIBLE_ARRAY_MEMBER];
} ProcArrayStruct;
static ProcArrayStruct *procArray;
获得快照
GetTransactionSnapshot()
通过函数GetTransactionSnapshot()获得快照
源码src/backend/utils/time/snapmgr.c
// GetTransactionSnapshot()为一个事务中的sql分配合适的快照
Snapshot
GetTransactionSnapshot(void)
{
// 如果是逻辑解码,则获得historic类型快照Return historic snapshot if doing logical decoding. We'll never need a
// 因为是逻辑解码事务,后续就不需要再call非historic类型快照了,直接return
if (HistoricSnapshotActive())
{
Assert(!FirstSnapshotSet);
return HistoricSnapshot;
}
/* 如果不是事务的第一次调用,则进入if */
if (!FirstSnapshotSet)
{
/*
* 保证catalog快照是新的
*/
InvalidateCatalogSnapshot();
Assert(pairingheap_is_empty(&RegisteredSnapshots));
Assert(FirstXactSnapshot == NULL);
//如果是并行模式下则返回报错
if (IsInParallelMode())
elog(ERROR,
"cannot take query snapshot during a parallel operation");
//如果是可重复读或串行化隔离级别,则在事务中都使用同一个快照,所以只copy一次
//IsolationUsesXactSnapshot()标识隔离级别为可重复读或串行化,他们的在同事务中只使用一个快照
if (IsolationUsesXactSnapshot())
{
//首先,在CurrentSnapshotData中创建快照
//如果是SI隔离级别,初始化SSI所需的数据结构
if (IsolationIsSerializable())
CurrentSnapshot = GetSerializableTransactionSnapshot(&CurrentSnapshotData);
else
CurrentSnapshot = GetSnapshotData(&CurrentSnapshotData);
/* Make a saved copy */
/* 可重复读或串行化隔离级别,这个快照会贯穿整个事务,所以只复制一次 */
CurrentSnapshot = CopySnapshot(CurrentSnapshot);
FirstXactSnapshot = CurrentSnapshot;
/* Mark it as "registered" in FirstXactSnapshot */
FirstXactSnapshot->regd_count++;
pairingheap_add(&RegisteredSnapshots, &FirstXactSnapshot->ph_node);
}
else
//如果是读已提交隔离级别,获得快照
CurrentSnapshot = GetSnapshotData(&CurrentSnapshotData);
// 修改标记,表示是第一次获得的快照,下次事务再调用该函数,就不会进到这层if了
FirstSnapshotSet = true;
return CurrentSnapshot;
}
//如果不是事务中第一次调用(已经有第一个快照了)
//可重复读或串行化隔离级别,返回第一个快照的复制品
if (IsolationUsesXactSnapshot())
return CurrentSnapshot;
/* Don't allow catalog snapshot to be older than xact snapshot. */
InvalidateCatalogSnapshot();
//读已提交级别,重新获得快照
CurrentSnapshot = GetSnapshotData(&CurrentSnapshotData);
return CurrentSnapshot;
}
关于IsolationUsesXactSnapshot()和IsolationIsSerializable()
在src/include/access/xact.h宏定义
#define XACT_READ_UNCOMMITTED 0
#define XACT_READ_COMMITTED 1
#define XACT_REPEATABLE_READ 2
#define XACT_SERIALIZABLE 3
//内部只有3个隔离级别,就是1、2、3
//2个隔离级别在每个事务中用同一快照,其他隔离级别在每个sql语句用一个快照
#define IsolationUsesXactSnapshot() (XactIsoLevel >= XACT_REPEATABLE_READ)
#define IsolationIsSerializable() (XactIsoLevel == XACT_SERIALIZABLE)
IsolationUsesXactSnapshot()是可重复读或串行化隔离级别
IsolationIsSerializable()是串行化隔离级别。
GetTransactionSnapshot()函数流程图:
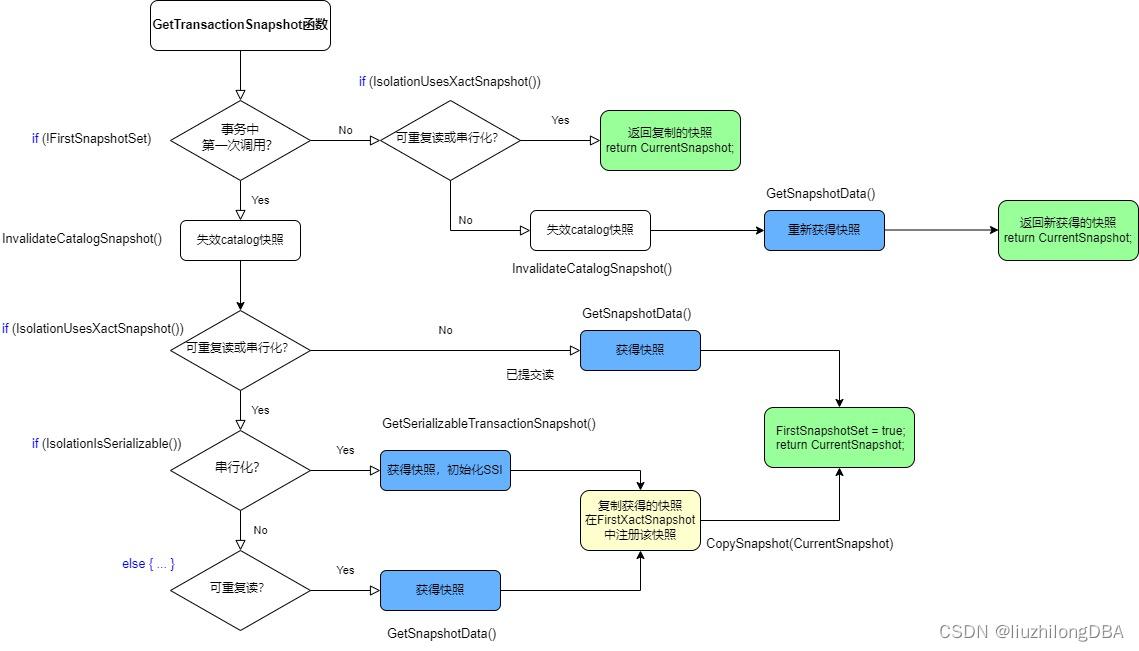
(图片来自csdn https://blog.csdn.net/Hehuyi_In)
GetTransactionSnapshot()主要的判断逻辑:
- 逻辑解码时的historic快照直接返回快照结果
- 在可重复读或串行化隔离级别,如果是第一次调用,返回快照并复制,以便下次(既非第一次)直接引用该快照
- 在读已提交隔离级别,每次调用都生成新快照
- 串行化隔离级别的第一次调用,额外获得SSI数据信息
GetTransactionSnapshot()获得快照,其获得快照数据调用的是GetSnapshotData()
GetSnapshotData()
源码src/backend/storage/ipc/procarray.c
Snapshot
GetSnapshotData(Snapshot snapshot)
{
//先初始化一些变量,包括arrayP指针,procarray,xmin,xmax,复制槽事务id等等
ProcArrayStruct *arrayP = procArray;
TransactionId xmin;
TransactionId xmax;
TransactionId globalxmin;
int index;
int count = 0;
int subcount = 0;
bool suboverflowed = false;
TransactionId replication_slot_xmin = InvalidTransactionId;
TransactionId replication_slot_catalog_xmin = InvalidTransactionId;
Assert(snapshot != NULL);
if (snapshot->xip == NULL)
{
/*
* First call for this snapshot. Snapshot is same size whether or not
* we are in recovery, see later comments.
*/
snapshot->xip = (TransactionId *) //获得当前事务的xip
malloc(GetMaxSnapshotXidCount() * sizeof(TransactionId));
...
Assert(snapshot->subxip == NULL);
snapshot->subxip = (TransactionId *) //获得当前子事务的subxip
malloc(GetMaxSnapshotSubxidCount() * sizeof(TransactionId));
...
}
//获取procarray,需要共享lwlock锁
LWLockAcquire(ProcArrayLock, LW_SHARED);
/* xmax=最大完成xid+1 */
xmax = ShmemVariableCache->latestCompletedXid;
Assert(TransactionIdIsNormal(xmax));
TransactionIdAdvance(xmax); //xmax+1
/* xmax的值已经取出,xmin需要检索pgproc、pgxact、procarray */
/* 先把globalxmin、xmin赋值xmax,如果判断backend没有事务信息,就比较好办了 */
globalxmin = xmin = xmax;
//恢复快照单独处理
snapshot->takenDuringRecovery = RecoveryInProgress();
//非恢复快照需要到backend中获取事务信息
if (!snapshot->takenDuringRecovery)
{
int *pgprocnos = arrayP->pgprocnos;
int numProcs;
/*
* Spin over procArray checking xid, xmin, and subxids. The goal is
* to gather all active xids, find the lowest xmin, and try to record
* subxids.看上去在检索procarray的时候会spin,以收集所有活跃的xid,最小的xmin,子事务subxid
*/
numProcs = arrayP->numProcs;
for (index = 0; index < numProcs; index++)
{
int pgprocno = pgprocnos[index]; //通过循环numProcs进程个数,取pgprocno全部下标
PGXACT *pgxact = &allPgXact[pgprocno]; //通过pgprocno遍历所有pgxact结构体
TransactionId xid;
...
/* Update globalxmin to be the smallest valid xmin */
xid = UINT32_ACCESS_ONCE(pgxact->xmin);
if (TransactionIdIsNormal(xid) &&
NormalTransactionIdPrecedes(xid, globalxmin))
globalxmin = xid;
/* Fetch xid just once - see GetNewTransactionId */
xid = UINT32_ACCESS_ONCE(pgxact->xid);
...
/* 把backend中的xmin保存到快照xip中 */
/* 也就是说通过便利所有pgxact以找到所有活跃的xid */
snapshot->xip[count++] = xid;
...
/* 子事务信息处理 */
if (!suboverflowed) //如果子事务没有溢出
{
if (pgxact->overflowed)
suboverflowed = true; //如果事务溢出,将子事务也标记为溢出
else
{
int nxids = pgxact->nxids;
if (nxids > 0)
{
PGPROC *proc = &allProcs[pgprocno];
pg_read_barrier(); /* pairs with GetNewTransactionId */
memcpy(snapshot->subxip + subcount,
(void *) proc->subxids.xids,
nxids * sizeof(TransactionId));
subcount += nxids;
}
}
}
}
}
else //这里的else对应if (!snapshot->takenDuringRecovery)
{
// 这里的判断都是standby的,当实例是hot standby模式,从库中有查询事务时
subcount = KnownAssignedXidsGetAndSetXmin(snapshot->subxip, &xmin,
xmax);
if (TransactionIdPrecedesOrEquals(xmin, procArray->lastOverflowedXid))
suboverflowed = true;
}
//事物槽的xmin和catalog全集群xmin,先保存到本地变量
//事物槽xmin是为了防止元组被回收
//注释中说明是为了不长时间持有ProcArrayLock,才保存到本地变量
replication_slot_xmin = procArray->replication_slot_xmin;
replication_slot_catalog_xmin = procArray->replication_slot_catalog_xmin;
//从backend中获取事务信息的工作已经完成,下面是一堆if判断,收尾工作并增加代码严谨性
if (!TransactionIdIsValid(MyPgXact->xmin))
MyPgXact->xmin = TransactionXmin = xmin;
LWLockRelease(ProcArrayLock); //释放ProcArrayLock
if (TransactionIdPrecedes(xmin, globalxmin))
globalxmin = xmin; //globalxmin和进程xmin,globalxmin赋值更小的那个
RecentGlobalXmin = globalxmin - vacuum_defer_cleanup_age;
if (!TransactionIdIsNormal(RecentGlobalXmin))
RecentGlobalXmin = FirstNormalTransactionId; //特殊情况下,如果RecentGlobalXmin<=2,赋值3
/* Check whether there's a replication slot requiring an older xmin. */
if (TransactionIdIsValid(replication_slot_xmin) &&
NormalTransactionIdPrecedes(replication_slot_xmin, RecentGlobalXmin))
RecentGlobalXmin = replication_slot_xmin;
/* Non-catalog tables can be vacuumed if older than this xid */
RecentGlobalDataXmin = RecentGlobalXmin;
//再次检查和对比catalog,globalxminn
if (TransactionIdIsNormal(replication_slot_catalog_xmin) &&
NormalTransactionIdPrecedes(replication_slot_catalog_xmin, RecentGlobalXmin))
RecentGlobalXmin = replication_slot_catalog_xmin;
RecentXmin = xmin;
//开始给snapshot结构体赋值,返回快照数据
snapshot->xmin = xmin;
snapshot->xmax = xmax;
snapshot->xcnt = count;
snapshot->subxcnt = subcount;
snapshot->suboverflowed = suboverflowed;
snapshot->curcid = GetCurrentCommandId(false);
//如果是一个新快照,初始化一些快照信息
snapshot->active_count = 0;
snapshot->regd_count = 0;
snapshot->copied = false;
//下面是快照过久时的判断,居然写在这
if (old_snapshot_threshold < 0)
{
/*
* If not using "snapshot too old" feature, fill related fields with
* dummy values that don't require any locking.
*/
//如果没有使用old_snapshot_threshold参数(参数<0,不会出现snapshot too old的问题)
//赋一些简单的值,都是常量,不会产生任何锁
snapshot->lsn = InvalidXLogRecPtr;
snapshot->whenTaken = 0;
}
else
{
//当old_snapshot_threshold参数>=0时,需要完成old snapshot的逻辑
snapshot->lsn = GetXLogInsertRecPtr(); //获得lsn
snapshot->whenTaken = GetSnapshotCurrentTimestamp(); //获得快照时间
MaintainOldSnapshotTimeMapping(snapshot->whenTaken, xmin); //
//GetXLogInsertRecPtr(),GetSnapshotCurrentTimestamp() ,MaintainOldSnapshotTimeMapping()三个函数中有 //SpinLockAcquire和SpinLockRelease
//MaintainOldSnapshotTimeMapping()函数还有LWLockAcquire和LWLockRelease
//因为每次快照都要调用,获取快照数据函数应该是很频繁的
//所以能看出来pg13源码中,如果将old_snapshot_threshold设置为负数,spinlock和lwlock会少很多
}
return snapshot;
}
pg14对事务的优化
pg14事务优化源码分析
pg13的源码能看出来GetSnapshotData()中写死了old_snapshot_threshold>=0时,每次获得快照数据都会产生较多的SpinLock和LWLock,而获得快照对于数据库来说是非常频繁的操作,这必定导致一些性能问题。所以pg14中直接把old_snapshot_threshold部分删除了···
除了删除GetSnapshotData()中的old_snapshot_threshold逻辑,还做了很多其他优化:
-
移除
RecentGlobalXmin,RecentGlobalDataXmin,新增GlobalVisTest*系列函数 -
新增边界boundaries概念,有两个边界分别为definitely_needed,maybe_needed
struct GlobalVisState { /* XIDs >= are considered running by some backend */ // >=definitely_needed的行一定可见 FullTransactionId definitely_needed; /* XIDs < are not considered to be running by any backend */ // <maybe_needed的行一定可以清理 FullTransactionId maybe_needed; }; -
新增
ComputeXidHorizons()用于进一步精准计算horizons(保存xmin和removable xid信息),该函数仍需要遍历PGPROC。计算的范围当然是在XID >= maybe_needed && XID < definitely_needed -
新增
GlobalVisTestShouldUpdate()用于判断是否需要再次计算边界先了解一个变量
ComputeXidHorizonsResultLastXminstatic TransactionId ComputeXidHorizonsResultLastXmin; //最后一次精准计算的xmin GlobalVisTestShouldUpdate(GlobalVisState *state) { //如果xmin=0,需要重新计算边界。相当于给初始化数据库产生的元组设置一个例外判断 if (!TransactionIdIsValid(ComputeXidHorizonsResultLastXmin)) return true; /* * If the maybe_needed/definitely_needed boundaries are the same, it's * unlikely to be beneficial to refresh boundaries. */ //maybe_needed等于definitely_needed不需要再计算了 //不过不是用的等于,而是maybe_needed>=definitely_needed //“大于”的场景是没有行一定可见,“等于”的场景是只有一行一定可见 if (FullTransactionIdFollowsOrEquals(state->maybe_needed, state->definitely_needed)) return false; /* does the last snapshot built have a different xmin? */ //当最后一次快照snapshot->xmin=最后一次精准计算的xmin时,不再重新计算边界 return RecentXmin != ComputeXidHorizonsResultLastXmin; }
可以看出maybe_needed和definitely_needed跟快照xmin、xmax是相似的,多嵌套了1层计算。先计算boundaries,再进一步精确计算horizons。GlobalVisTestShouldUpdate减少了计算boundaries的场景,而ComputeXidHorizons()精准计算也更高效。
优化结果
推荐一篇pg快照优化的文章:
https://techcommunity.microsoft.com/t5/azure-database-for-postgresql/improving-postgres-connection-scalability-snapshots/ba-p/1806462
对比优化前后的效果相当明显[外链图片转存失败,源站可能有防盗链机制,
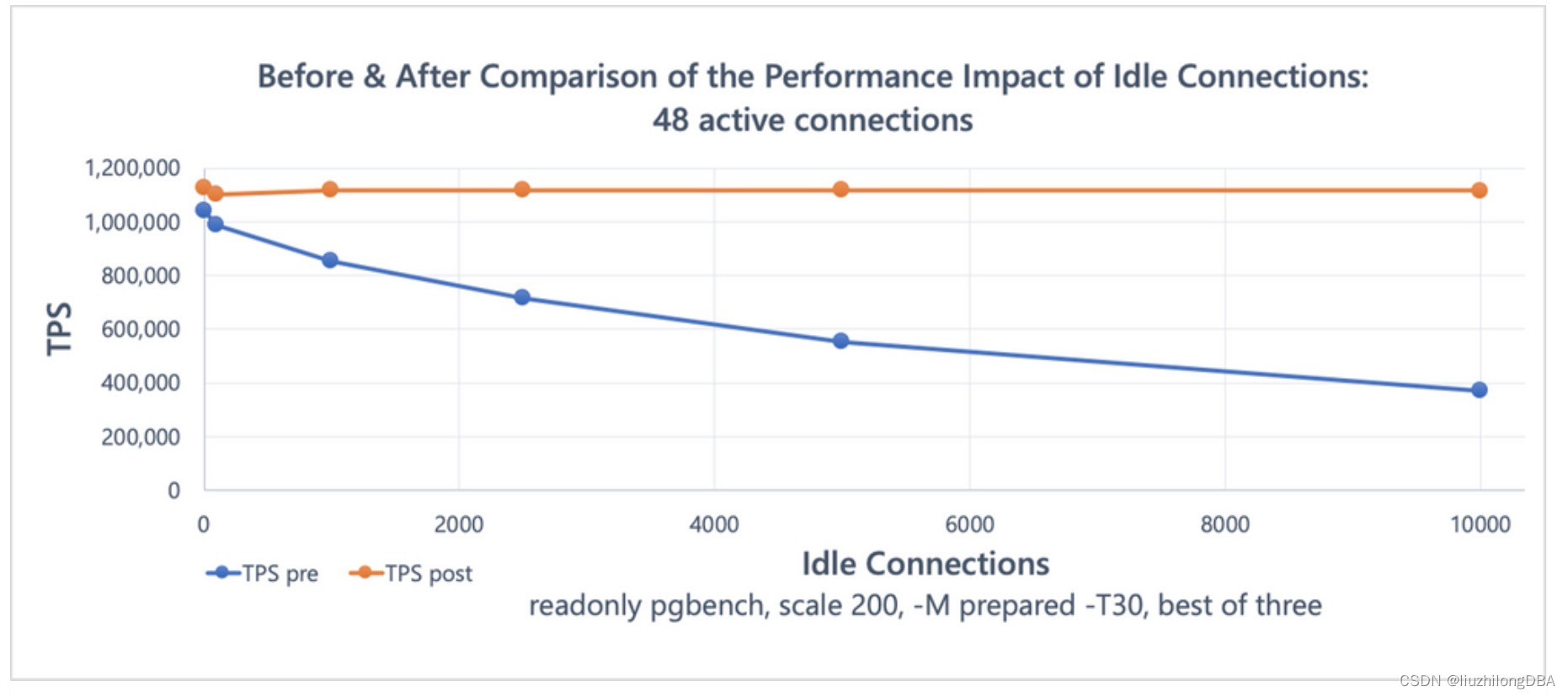
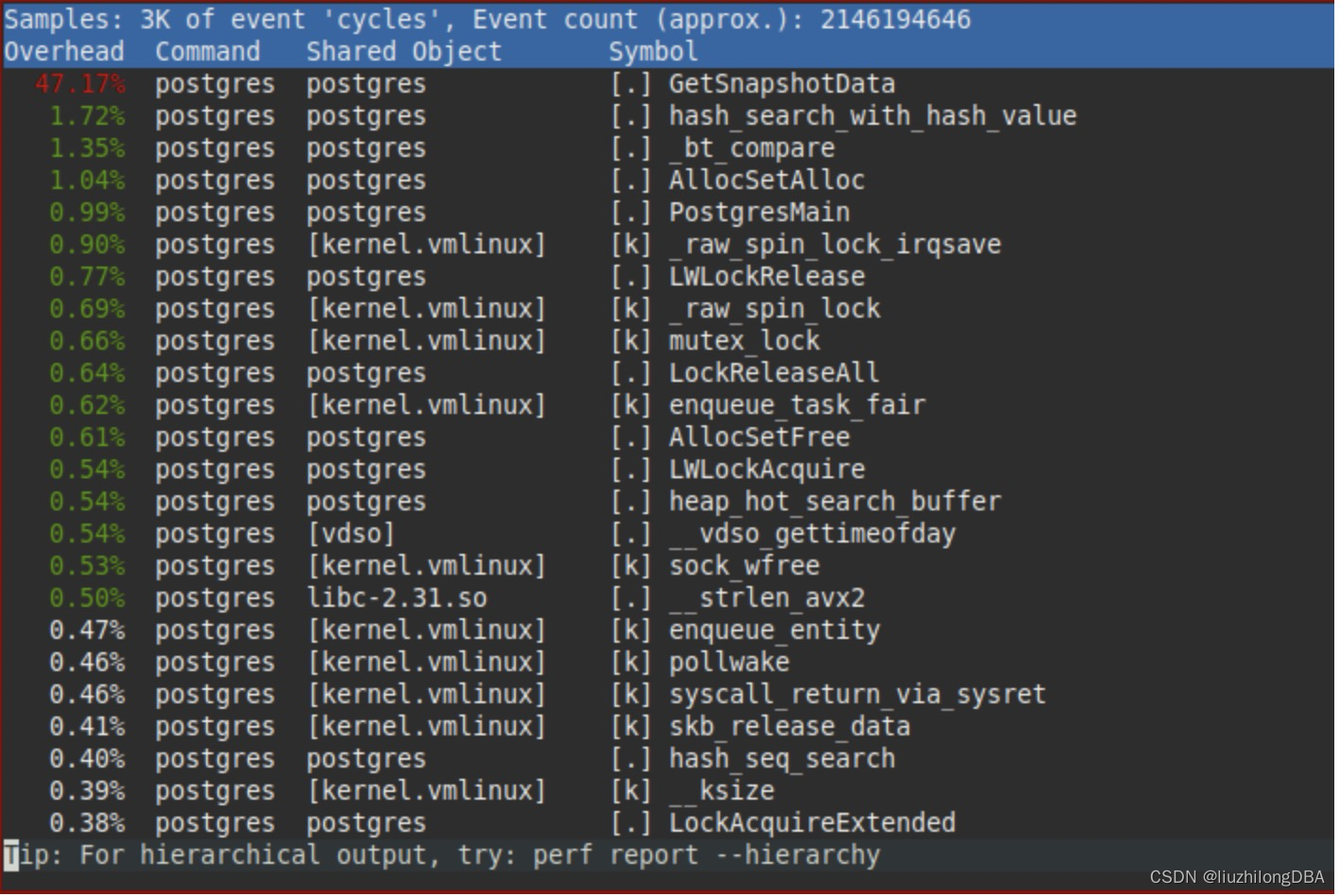
其实在pg13的生产上也能看到GetSnapshotData的性能消耗总是很高。不过没截图,再借用下大佬的图
reference
books:
《postgresql指南 内幕探索》
《postgresql实战》
《postgresql技术内幕 事务处理深度探索》
《postgresql数据库内核分析》
https://edu.postgrespro.com/postgresql_internals-14_parts1-2_en.pdf
官方资料:
https://en.wikipedia.org/wiki/Concurrency_control
https://wiki.postgresql.org/wiki/Hint_Bits
https://www.postgresql.org/docs/current/routine-vacuuming.html#VACUUM-FOR-WRAPAROUND
https://www.postgresql.org/docs/10/storage-page-layout.html
https://www.postgresql.org/docs/13/pageinspect.html3
pg事务必读文章 interdb
https://www.interdb.jp/pg/pgsql05.html
https://www.interdb.jp/pg/pgsql06.html
源码大佬
https://blog.csdn.net/Hehuyi_In/article/details/102920988
https://blog.csdn.net/Hehuyi_In/article/details/127955762
https://blog.csdn.net/Hehuyi_In/article/details/125023923
pg的快照优化性能对比
https://techcommunity.microsoft.com/t5/azure-database-for-postgresql/improving-postgres-connection-scalability-snapshots/ba-p/1806462
其他资料
https://brandur.org/postgres-atomicity
https://mp.weixin.qq.com/s/j-8uRuZDRf4mHIQR_ZKIEg