文章目录
- 一、前言
- 二、Fast-RCNN原理步骤
- 2.1候选区域的生成
- 2.2.ROI Pooling层
- 2.3.分类器
- 2.4.边界框的预测
- 2.5.损失计算
- 2.5.1.分类损失
- 2.5.2.边界框回归损失
- 三、总结
- 参考博客与视频、代码
一、前言
前面学习了SS算法、R-CNN网络,接下来继续学习Fast-RCNN网络。

本文两个目的,其一作为个人笔记,方便自己巩固复习知识;其二帮助正在自学的朋友,希望拙劣的见解可以帮助到大家。
二、Fast-RCNN原理步骤
Fast-RCNN可以分为三个步骤:
1)使用SS算法生成大概1-2k的候选框。
2)参考SPPnet模型来将整张图片输入网络得到特征图,再将第一步得到的候选框映射到特征矩阵来提取特征矩阵。
3)特征层通道ROI pooling操作缩放到7*7大小,展平连接一系列的全连接层得到分类结果和边界框回归参数。
2.1候选区域的生成
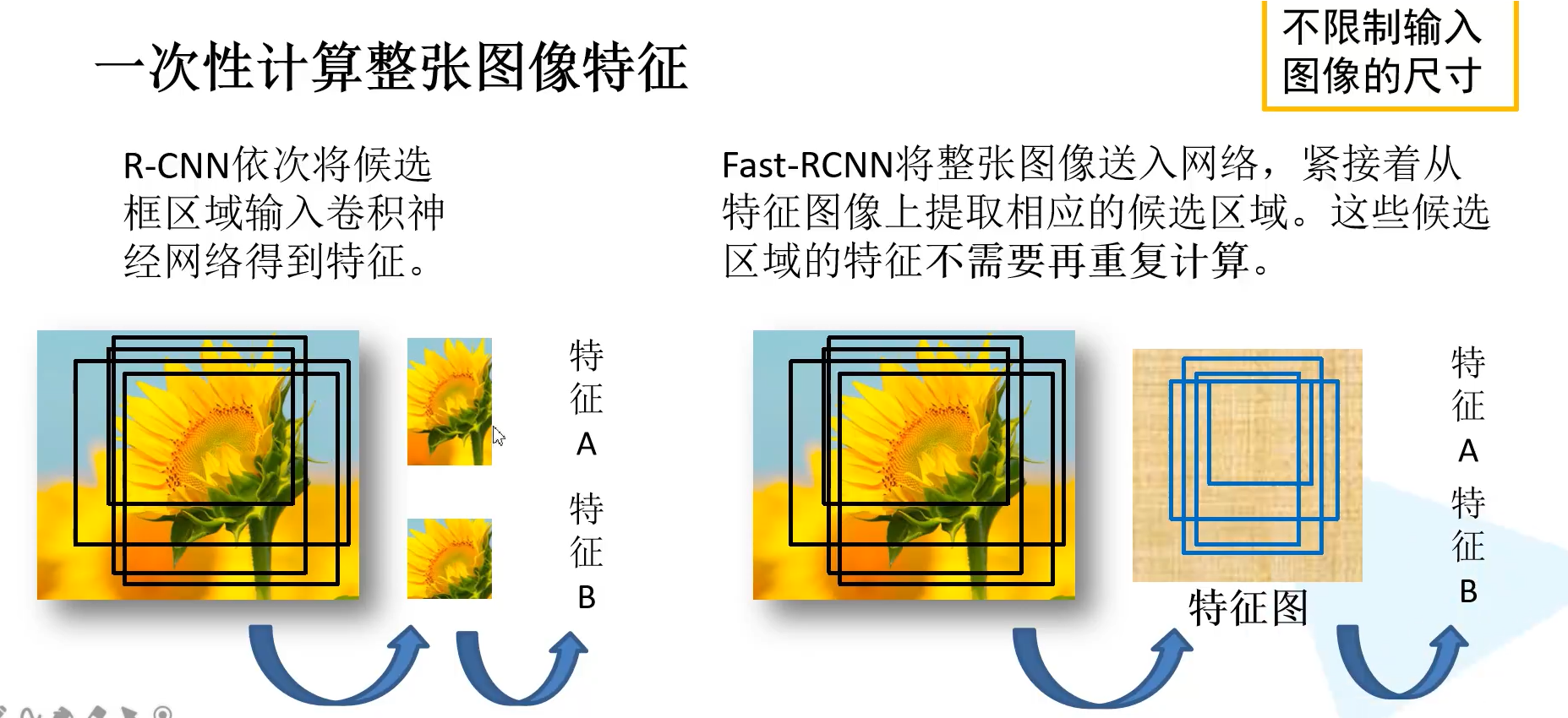
上图为R-CNN与Fast-RCNN生成候选区域的方式对比
R-CNN
可以看到R-CNN生成的候选框都需要输入深度网络提取特征,进行正向传播,冗余区域的重复计算,极大的增加了计算量,降低效率。
Fast-RCNN
它将整张图片输入网络,得到特征图,SS算法得到的候选框映射到特征图来获取特征,这样就不需要再重复计算这些候选区域。大大减小了计算量。
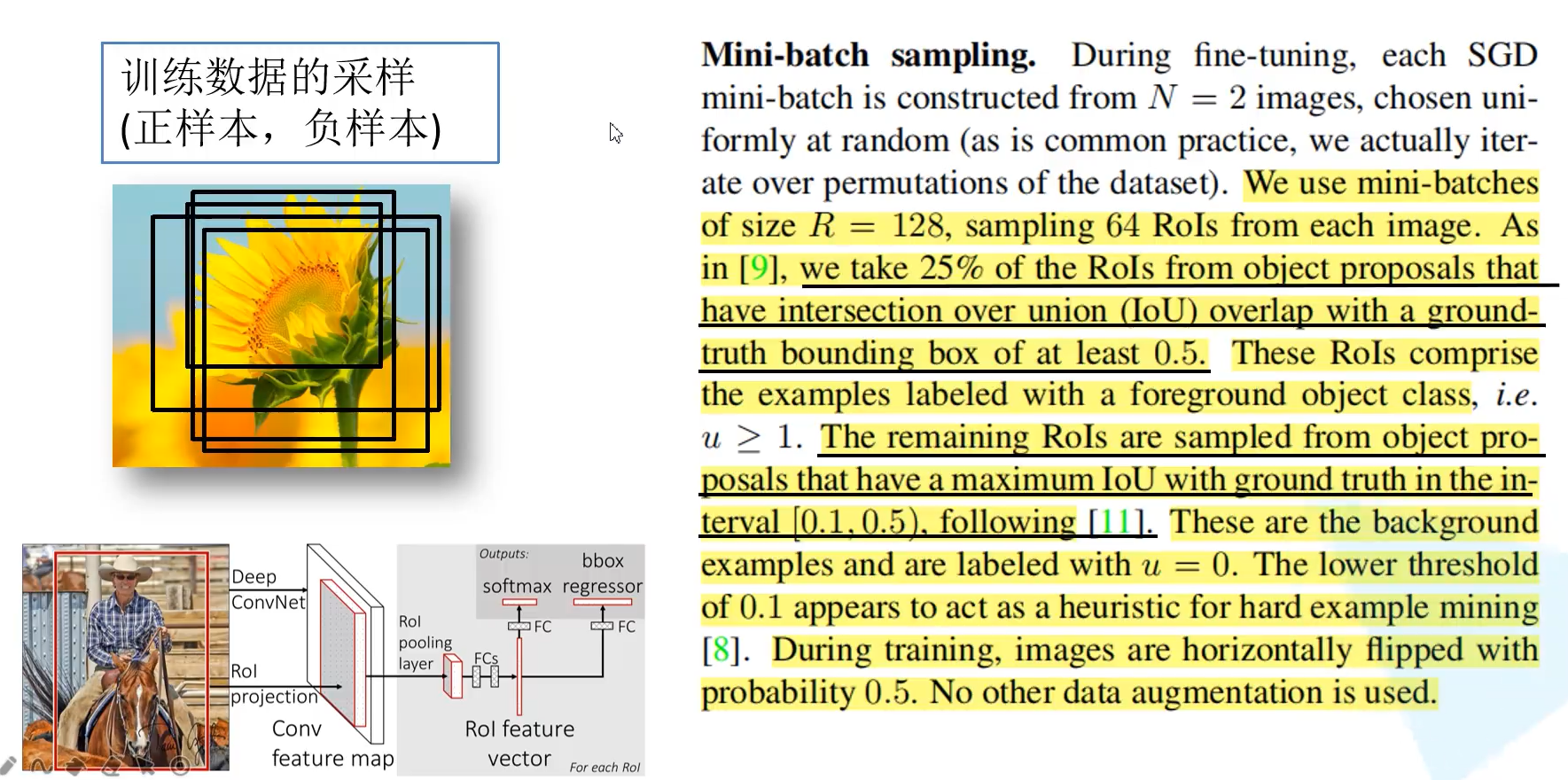
训练数据的采样(正样本与负样本)
与R-CNN不同的是,我们并没有使用SS算法生成的所有候选框,SS算法生成的近2000个候选框,实际上训练只使用了一小部分的候选框,而且样本分为正样本和负样本。具体论文里面有提到:分为正样本和负样本是为了平衡数据,因为如果正样本明显偏多,那么网络会理所当然的认为待识别的候选框是目标种类的一种,但实际上候选框也很有可能是背景,因此为了平衡包含目标和包含背景分为了正样本和负样本。
正样本与负样本的定义:候选框与真实框IOU大于0.5即为正样本,IOU在[0.1,0.5],记为负样本。
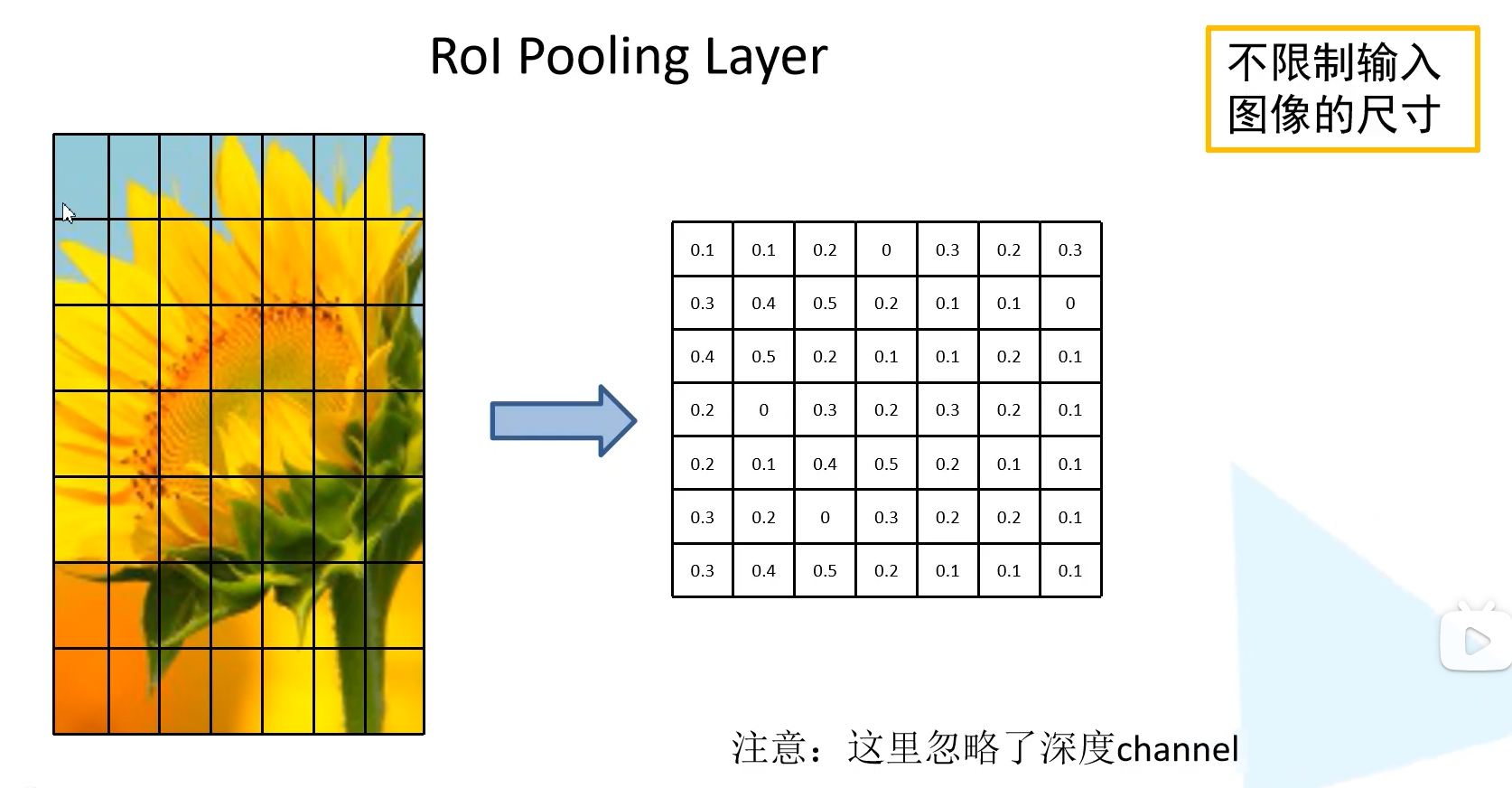
2.2.ROI Pooling层
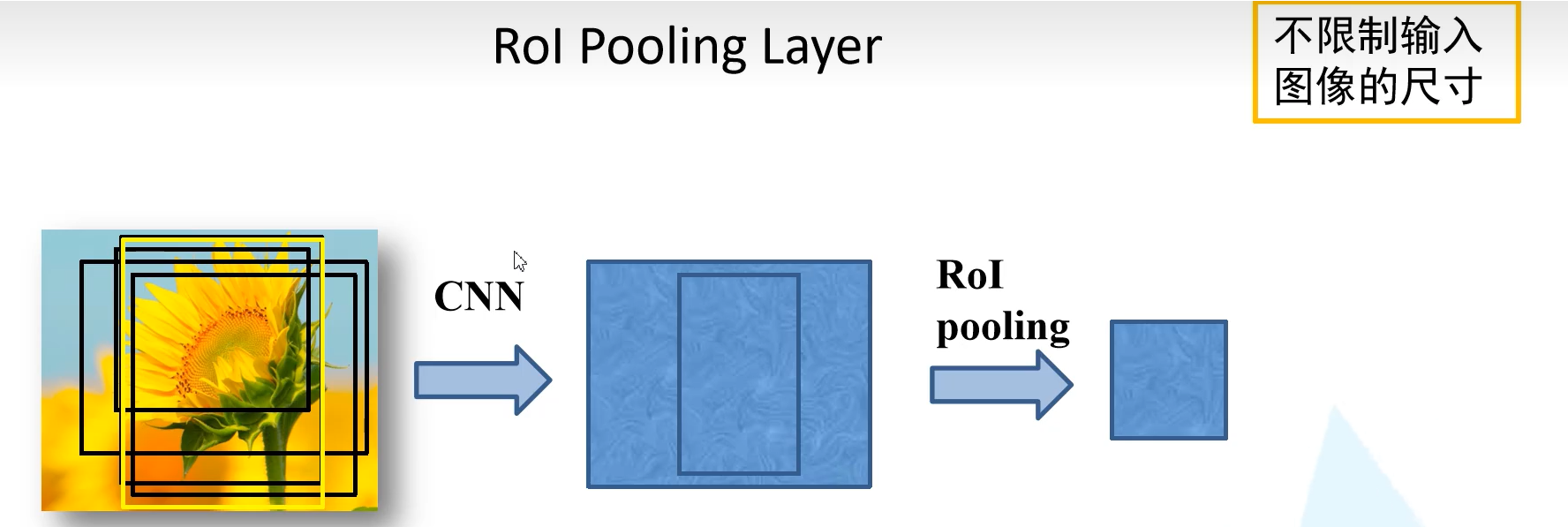
ROI Pooling层的实现
将样本划分为7*7个区域,对每个区域进行max pooling操作
2.3.分类器
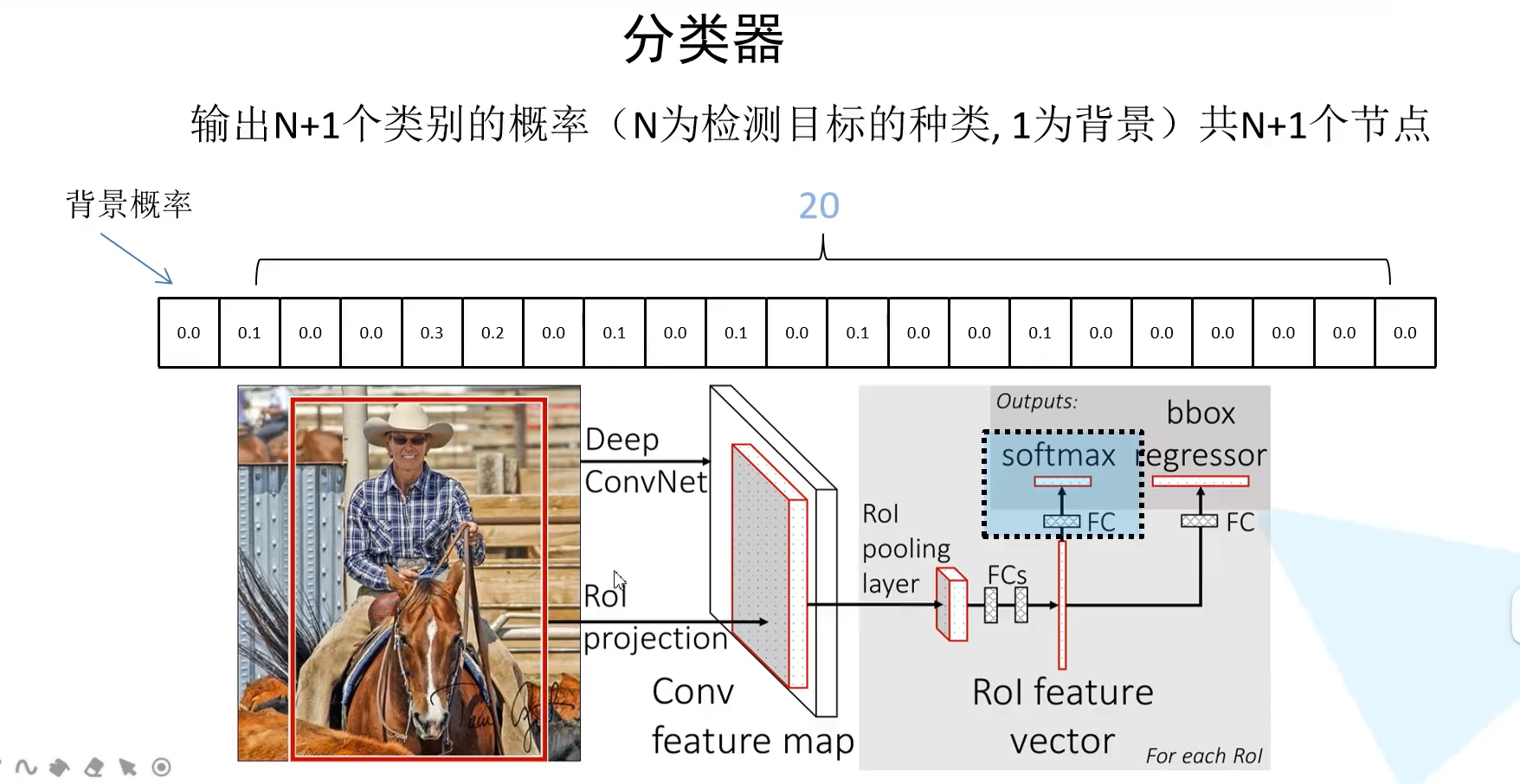
上面讲到我们在提取特征后经过ROI pooling层处理缩放到相同大小,然后拉直展平再经过两个全连接层,再分别于并联全连接层来分别进行类别概率的预测和bounding box边界框的预测。
对于分类器最后输出N+1个类别的概率,N为检测目标的类别数目,1为背景,得到的概率分布是经过了softmax的处理。
2.4.边界框的预测
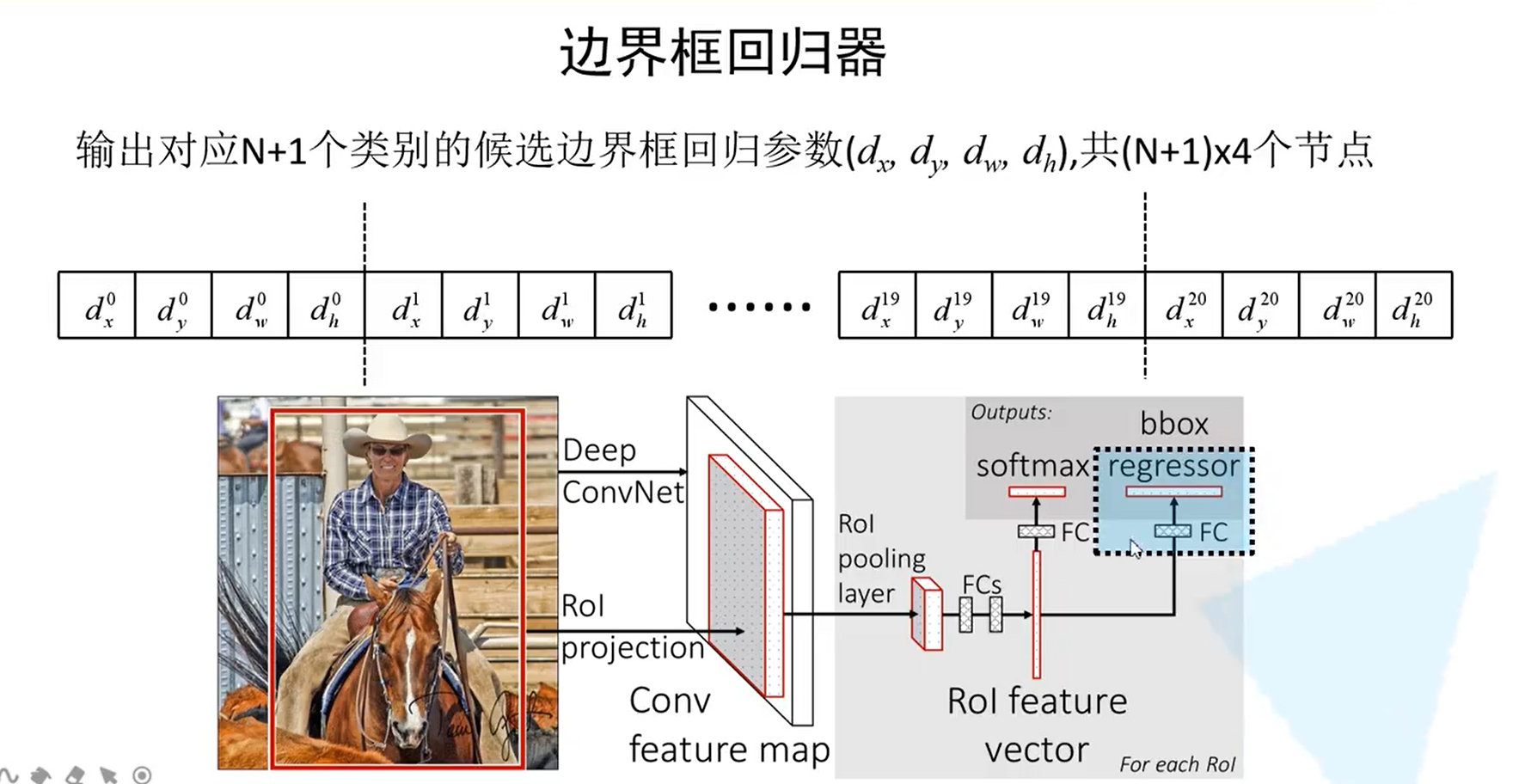
对于每个类别都会输出一组候选框回归参数(d_x, d_y, d_w, d_h)最后一层输出的结点个数为(N+1)*4
那么如何利用这些参数得到最终的预测框?
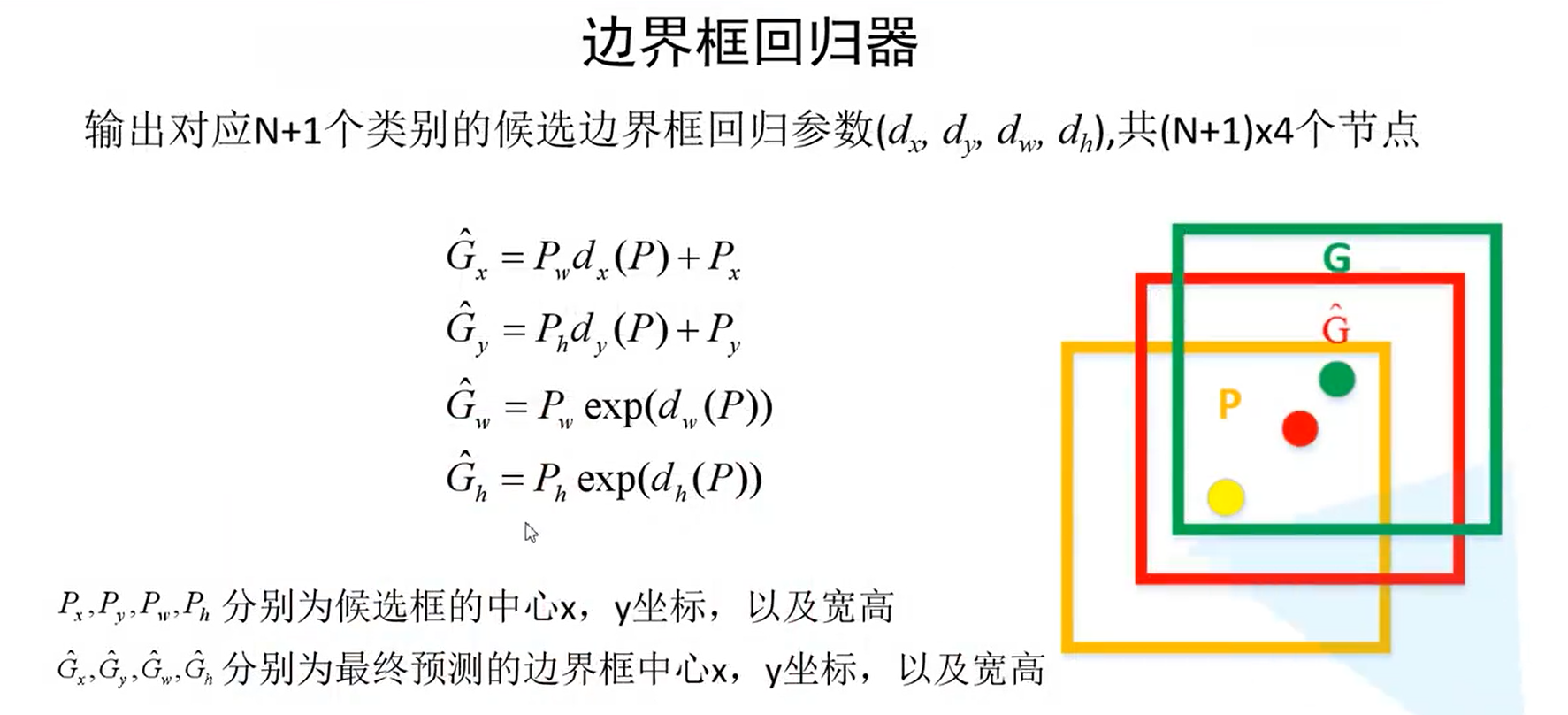
如图中所示:P表示预测框,G为真实框、G^为最终预测框,我们可以这么理解这几个公式:认为输出的回归参数对预测框进行中心坐标x,y的偏移调整,以及对候选框的宽和高进行缩放调整。
这几个公式来自于R-CNN论文,exp指指数次方。
2.5.损失计算
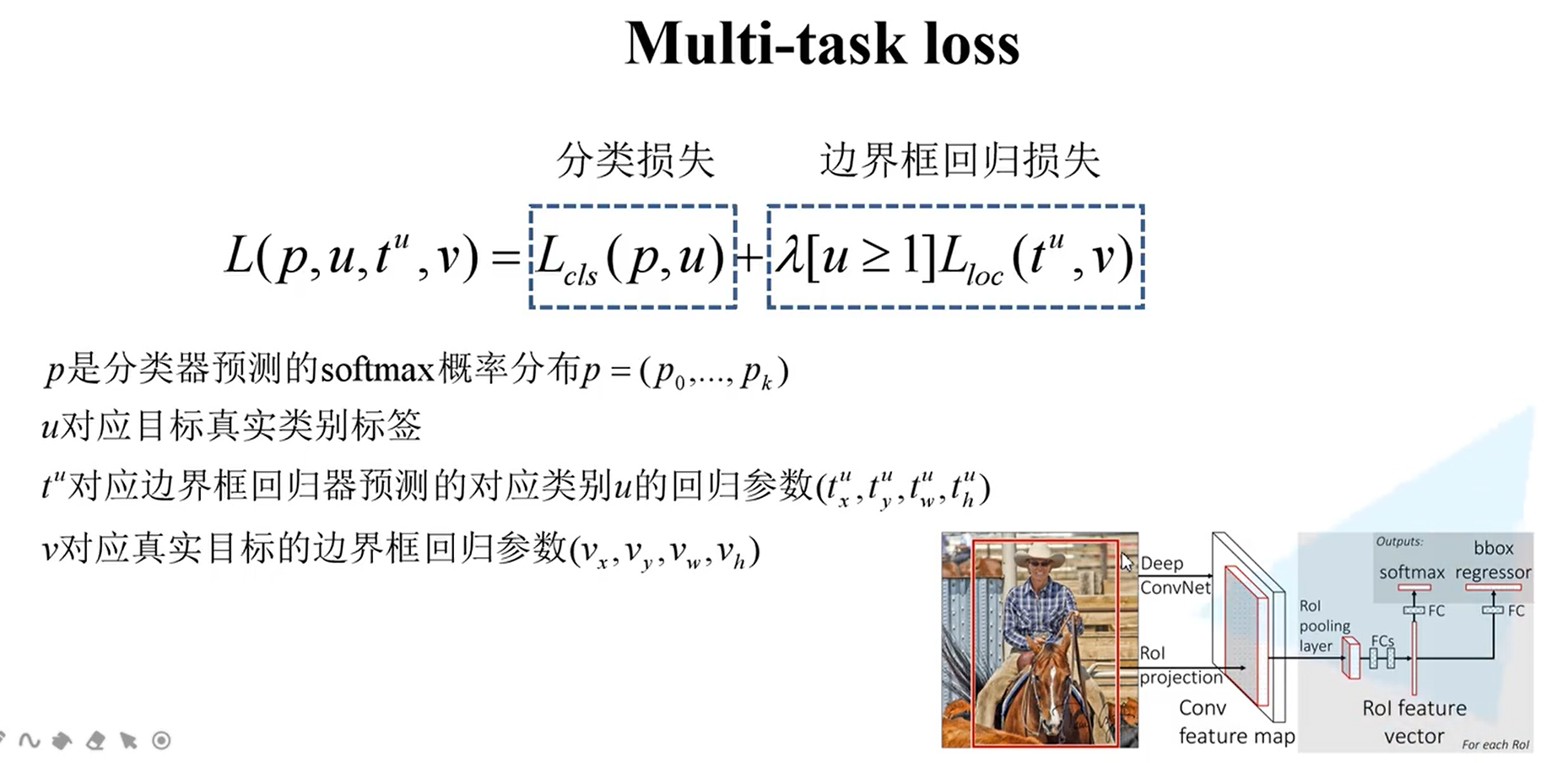
与R-CNN不同的是,Fast-RCNN因为分类与边界框的回归是一起训练的,因此损失也为对应部分损失的和。
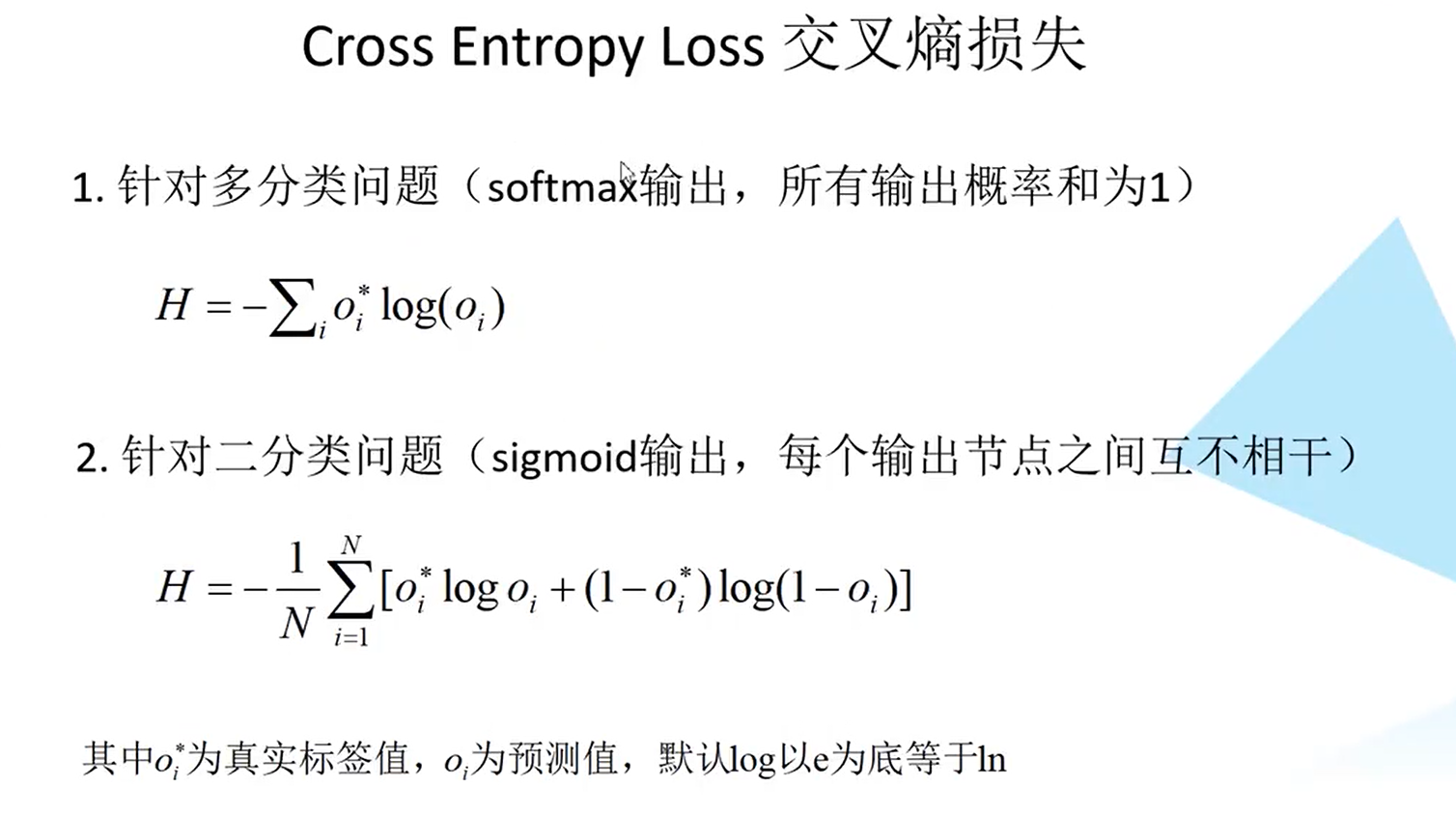
2.5.1.分类损失
L c l s ( p , u ) L_{cls}(p, u) Lcls(p,u)指分类的损失,p为预测类别的概率分布p=p_0,p1,…pk,u为目标真实类别标签,计算公式为:
L c l s ( p , u ) = − l o g p u L_{cls}(p, u) = -log^{p_u} Lcls(p,u)=−logpu
Pu指当前框预测类别为u的概率。实际上上面的公式就是为交叉熵损失,只不过其他的类别标签为0,因此被化简了。
2.5.2.边界框回归损失
λ
表示平衡系数来使数值稳定
\lambda表示平衡系数来使数值稳定
λ表示平衡系数来使数值稳定
[u>=1]为艾弗森括号,当真实标签为u类别这一项为1,当不满足这个条件等于0,也就是说只有预测类别不是背景才为1,为背景则为0,
t
u
t^u
tu为预测的边界框回归参数,具体为:
(
t
x
u
,
t
y
u
,
t
w
u
,
t
h
u
)
({t_x}^u,{t_y}^u,{t_w}^u,{t_h}^u)
(txu,tyu,twu,thu)
v为真实的边界框回归参数(v是通过真实的框位置中心和框宽和高利用上面的公式反推而来的,反推公式如下)
v x = G x − P x P w v_x = \frac{G_x - P_x}{P_w} vx=PwGx−Px
v y = G y − P y P h v_y = \frac{G_y - P_y}{P_h} vy=PhGy−Py
v w = l o g G w P w v_w =log^{ \frac{G_w}{P_w}} vw=logPwGw
v h = l o g G h P h v_h = log^{\frac{G_h}{P_h}} vh=logPhGh
L l o c ( t u , v ) = Σ i ∈ x , y , w , h ( s m o o t h L 1 ( t i u − v ) ) L_{loc}(t^{u}, v) = \Sigma_{i \in {x, y, w, h}}(smooth_{L_{1}}{(t_i}^{u}-v)) Lloc(tu,v)=Σi∈x,y,w,h(smoothL1(tiu−v))
SoomthL1函数如下:
s o o m t h L 1 = { 0.5 ∗ x 2 i f ∣ x ∣ < 1 ∣ x ∣ − 0.5 o t h e r w i s e soomth_{L_1}=\begin{cases}0.5*x^2 & if|x|< 1 \\ |x| - 0.5 & otherwise\end{cases} soomthL1={0.5∗x2∣x∣−0.5if∣x∣<1otherwise
三、总结
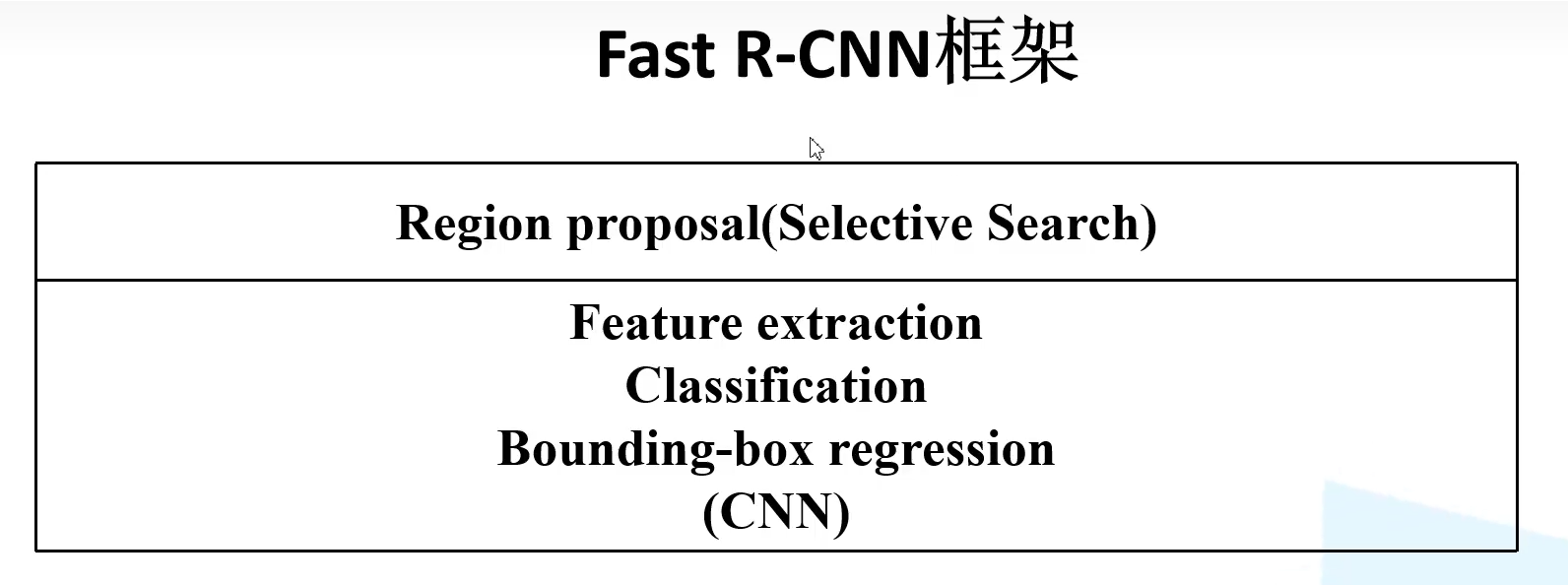
相比R-CNN,步骤简化为了两步,特征提取、分类、边界框回归都用一个CNN来完成。
参考博客与视频、代码
B站up主视频地址
[代码地址](https://github.com/rbgirshick/ fast-rcnn)
[论文地址]([1504.08083] Fast R-CNN (arxiv.org))
前文博客:
SS-算法
R-CNN网络详解


![[组合数学]母函数与递推关系](https://img-blog.csdnimg.cn/ae5f58496c0e46668a549328fe1bbf61.png)