一 为什么需要Deepspeed
大模型(LLM)在训练时往往需要大量内存来存储中间激活、权重等参数,百亿模型甚至无法在单个 GPU上进行训练,使得模型训练在某些情况下非常低效和不可能。这就需要进行多卡,或者多节点分布式训练。
在大规模深度学习模型训练中有个主要范式:
- 数据并行
- 模型并行
目前训练超大规模语言模型技术路线:GPU + PyTorch + Megatron-LM + DeepSpeed
DeepSpeed是由Microsoft提供的分布式训练工具,旨在支持更大规模的模型和提供更多的优化策略和工具。与其他框架相比,DeepSpeed支持更大规模的模型和提供更多的优化策略和工具。其中,主要优势在于支持更大规模的模型、提供了更多的优化策略和工具(例如 ZeRO 和 Offload 等)
- 用 3D 并行化实现万亿参数模型训练: DeepSpeed 实现了三种并行方法的灵活组合:ZeRO 支持的数据并行,流水线并行和张量切片模型并行。3D 并行性适应了不同工作负载的需求,以支持具有万亿参数的超大型模型,同时实现了近乎完美的显存扩展性和吞吐量扩展效率。此外,其提高的通信效率使用户可以在网络带宽有限的常规群集上以 2-7 倍的速度训练有数十亿参数的模型。
- ZeRO-Offload 使 GPU 单卡能够训练 10 倍大的模型: 为了同时利用 CPU 和 GPU 内存来训练大型模型,我们扩展了 ZeRO-2。我们的用户在使用带有单张英伟达 V100 GPU 的机器时,可以在不耗尽显存的情况下运行多达 130 亿个参数的模型,模型规模扩展至现有方法的10倍,并保持有竞争力的吞吐量。此功能使数十亿参数的模型训练更加大众化,,并为许多深度学习从业人员打开了一扇探索更大更好的模型的窗户。
- 通过 DeepSpeed Sparse Attention 用6倍速度执行10倍长的序列: DeepSpeed提供了稀疏 attention kernel ——一种工具性技术,可支持长序列的模型输入,包括文本输入,图像输入和语音输入。与经典的稠密 Transformer 相比,它支持的输入序列长一个数量级,并在保持相当的精度下获得最高 6 倍的执行速度提升。它还比最新的稀疏实现快 1.5–3 倍。此外,我们的稀疏 kernel 灵活支持稀疏格式,使用户能够通过自定义稀疏结构进行创新。
- 1 比特 Adam 减少 5 倍通信量: Adam 是一个在大规模深度学习模型训练场景下的有效的(也许是最广为应用的)优化器。然而,它与通信效率优化算法往往不兼容。因此,在跨设备进行分布式扩展时,通信开销可能成为瓶颈。我们推出了一种 1 比特 Adam 新算法,以及其高效实现。该算法最多可减少 5 倍通信量,同时实现了与Adam相似的收敛率。在通信受限的场景下,我们观察到分布式训练速度提升了 3.5 倍,这使得该算法可以扩展到不同类型的 GPU 群集和网络环境。
1.1基本概念
- 在分布式计算环境中,需要理解几个非常基础的概念:节点编号、全局进程编号、局部进程编号、全局总进程数和主节点。其中,主节点负责协调所有其他节点和进程的工作,因此是整个系统的关键部分。
- DeepSpeed 还提供了 mpi、gloo 和 nccl 等通信策略,可以根据具体情况进行选择和配置。在使用 DeepSpeed 进行分布式训练时,可以根据具体情况选择合适的通信库,例如在 CPU 集群上进行分布式训练,可以选择 mpi 和 gloo;如果是在 GPU 上进行分布式训练,可以选择 nccl。
- ZeRO(Zero Redundancy Optimizer)是一种用于大规模训练优化的技术,主要是用来减少内存占用。ZeRO 将模型参数分成了三个部分:Optimizer States、Gradient 和 Model Parameter。在使用 ZeRO 进行分布式训练时,可以选择 ZeRO-Offload 和 ZeRO-Stage3 等不同的优化技术。
- 混合精度训练是指在训练过程中同时使用FP16(半精度浮点数)和FP32(单精度浮点数)两种精度的技术。使用FP16可以大大减少内存占用,从而可以训练更大规模的模型。在使用混合精度训练时,需要使用一些技术来解决可能出现的梯度消失和模型不稳定的问题,例如动态精度缩放和混合精度优化器等。
- 结合使用huggingface和deepspeed
在分布式计算环境中,有几个非常基础的概念需要理解:
- 节点编号(node_rank:):分配给系统中每个节点的唯一标识符,用于区分不同计算机之间的通信。
- 全局进程编号(rank):分配给整个系统中的每个进程的唯一标识符,用于区分不同进程之间的通信。
- 局部进程编号(local_rank):分配给单个节点内的每个进程的唯一标识符,用于区分同一节点内的不同进程之间的通信。
- 全局总进程数(word_size):在整个系统中运行的所有进程的总数,用于确定可以并行完成多少工作以及需要完成任务所需的资源数量。
- 主节点(master_ip+master_port):在分布式计算环境中,主节点负责协调所有其他节点和进程的工作,为了确定主节点,我们需要知道它的IP地址和端口号。主节点还负责监控系统状态、处理任务分配和结果汇总等任务,因此是整个系统的关键部分。
1.2 通信策略
deepspeed 还提供了 mpi、gloo 和 nccl 等通信策略,可以根据具体情况进行选择和配置。
- mpi 是一种跨节点通信库,常用于 CPU 集群上的分布式训练;
- gloo 是一种高性能的分布式训练框架,支持 CPU 和 GPU 上的分布式训练;
- nccl 是 NVIDIA 提供的 GPU 专用通信库,被广泛应用于 GPU 上的分布式训练。
在使用 DeepSpeed 进行分布式训练时,可以根据具体情况选择合适的通信库。通常情况下,如果是在 CPU 集群上进行分布式训练,可以选择 mpi 和 gloo;如果是在 GPU 上进行分布式训练,可以选择 nccl。
export CUDA_LAUNCH_BLOCKING=1
二 Zero(3D优化与卸载)
微软开发ZeRO是为了克服数据并行性和模型并行性的限制,同时实现两者的优点。ZeRO通过在数据并行进程中划分模型状态(参数,梯度和优化器状态),而不是复制它们,从而消除了数据并行进程中的内存冗余。它在训练期间使用动态通信计划,以在分布式设备之间共享必要的状态,以保持计算粒度和数据并行性的通信量。
ZeRO驱动的数据并行性,它允许每个设备的内存使用量随数据并行性的程度线性扩展,并产生与数据并行性相似的通信量。 ZeRO支持的数据并行性可以适合任意大小的模型,只要聚合的设备内存足够大以共享模型状态即可。
ZeRO(Zero Redundancy Optimizer)是一种用于大规模训练优化的技术,主要是用来减少内存占用。在大规模训练中,内存占用可以分为 Model States 和 Activation 两部分,而 ZeRO 主要是为了解决 Model States 的内存占用问题。
ZeRO 将模型参数分成了三个部分:Optimizer States、Gradient 和 Model Parameter。
- Optimizer States 是 Optimizer 在进行梯度更新时所需要用到的数据,例如 SGD 中的 Momentum。
- Gradient 是在反向传播后所产生的梯度信息,其决定了参数的更新方向。
- Model Parameter 则是模型参数,也就是我们在整个过程中通过数据“学习”的信息。
ZeRO-Offload和ZeRO-Stage3是DeepSpeed中的不同的Zero-Redundancy Optimization技术,用于加速分布式训练,主要区别在资源占用和通信开销方面。
- ZeRO-Offload将模型参数分片到不同的GPU上,通过交换节点间通信来降低显存占用,但需要进行额外的通信操作,因此可能会导致训练速度的下降。
- ZeRO-Stage3将模型参数分布在CPU和GPU上,通过CPU去计算一部分梯度,从而减少显存占用,但也会带来一定的计算开销。
2.1 三个级别
ZeRO-0:禁用所有类型的分片,仅使用 DeepSpeed 作为 DDP (Distributed Data Parallel)
ZeRO-1:分割Optimizer States,减少了4倍的内存,通信容量与数据并行性相同
ZeRO-2:分割Optimizer States与Gradients,8x内存减少,通信容量与数据并行性相同
ZeRO-3:分割Optimizer States、Gradients与Parameters,内存减少与数据并行度和复杂度成线性关系。
ZeRO-Infinity是ZeRO-3的拓展。允许通过使用 NVMe 固态硬盘扩展 GPU 和 CPU 内存来训练大型模型。ZeRO-Infinity 需要启用 ZeRO-3。
在deepspeed中通过zero_optimization.stage=0/1/2/3 设置,
卸载通过zero_optimization.offload_optimizer.device设置
2.2 混合精度
混合精度训练是指在训练过程中同时使用FP16(半精度浮点数)和FP32(单精度浮点数)两种精度的技术。使用FP16可以大大减少内存占用,从而可以训练更大规模的模型。但是,由于FP16的精度较低,训练过程中可能会出现梯度消失和模型不稳定的问题。因此,需要使用一些技术来解决这些问题,例如动态精度缩放(Dynamic Loss Scaling)和混合精度优化器(Mixed Precision Optimizer)等。
deepspeed提供了混合精度训练的支持,可以通过在配置文件中设置"fp16.enabled": true来启用混合精度训练。在训练过程中,deepspeed会自动将一部分操作转换为FP16格式,并根据需要动态调整精度缩放因子,从而保证训练的稳定性和精度。
在使用混合精度训练时,需要注意一些问题,例如梯度裁剪(Gradient Clipping)和学习率调整(Learning Rate Schedule)等。梯度裁剪可以防止梯度爆炸,学习率调整可以帮助模型更好地收敛。因此,在设置混合精度训练时,需要根据具体情况进行选择和配置。
BF16
BF16和FP16都是混合精度训练中使用的浮点数表示格式。
BF16是一种Brain Floating Point格式,由英特尔提出,可以提供更好的数值稳定性和更高的精度,但需要更多的存储空间。在混合精度训练中,BF16可以作为一种精度更高的替代品,用于一些关键的计算操作,例如梯度累加和权重更新等。使用BF16可以提高模型的训练速度和精度,并减少内存占用。
在 DeepSpeed 中,可以通过在配置文件中设置 "bf16.enabled": true 来启用 BF16 混合精度训练。这将会将一部分操作转换为 BF16 格式,并根据需要动态调整精度缩放因子,从而提高模型的训练速度和精度,并减少内存占用。
NVIDIA Tesla V100 不支持BF16
2.3 显存占用分析
混合精度训练,字如其名,同时存在fp16和fp32两种格式的数值,其中模型参数、模型梯度都是fp16,此外还有fp32的模型参数,如果优化器是Adam,则还有fp32的momentum和variance。
总的来说,模型训练时显存主要分为两部分。
第一部分是模型权重、梯度和优化器状态;
第二部分是激活和临时缓存区。
ZeRO-DP主要是优化第一部分的显存占用,所以这里主要介绍第一部分的显存。

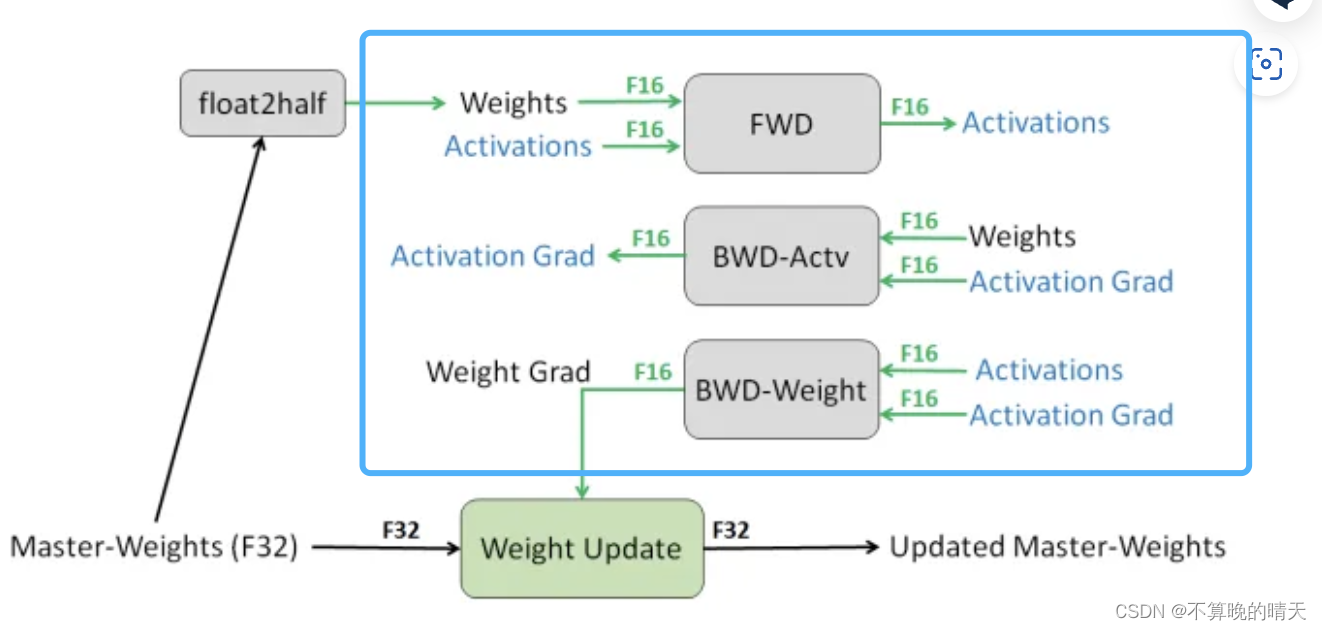
1. 模型状态(model states):假设模型的参数量是 Ψ ,使用Adam为优化器进行混合精度训练。
a.由于模型的参数和梯度使用float16,所以显存消耗分别为 2Ψ 和 2Ψ 。
b. Adam会维护一个float32的模型备份副本,消耗 4Ψ 显存。Adam优化器本身会为模型的每个参数维护两个float32的辅助变量(fp32的momentum和fp32的variance),所以显存消耗占用为 4Ψ+4Ψ 。
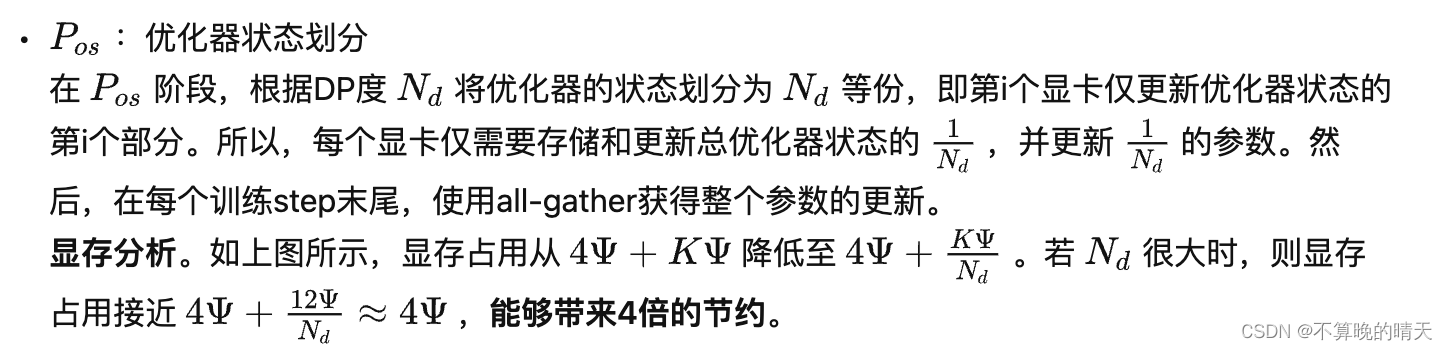
总的来说,模型会消耗 2Ψ+2Ψ=4Ψ ,Adam优化器这消耗 4Ψ+4Ψ+4Ψ=12Ψ 。最终的总消耗为 4Ψ+12Ψ=16Ψ 。
这里为了方便讨论,将优化器显存占用表示为 KΨ (不同的优化器不同),则混合精度训练的显存占用为 4Ψ+KΨ 。
来看一个例子,GPT-2含有1.5B个参数,如果用fp16格式,只需要1.5G*2Byte=3GB显存
但是模型状态实际上需要耗费1.5*16=24GB, 相比之下,激活值可以用activation checkpointing来大大减少,所以模型状态就成了头号显存杀手,它也是ZeRO的重点优化对象。而其中Adam状态又是第一个要被优化的。
比如说有一个模型参数量是1M,在一般的深度学习框架中(比如说PyTorch),一般是32位存储。32位存储的意思就是1个参数用32个bit来存储。那么这个拥有1M参数量的模型所需要的存储空间的大小即为:1M * 32 bit = 32Mb = 4MB。因为1 Byte = 8 bit。现在的quantization技术就是减少参数量所占的位数:比如我用16位存储,那么:所需要的存储空间的大小即为:1M * 16 bit = 16Mb = 2MB。
2. 剩余状态(residual states): 除了模型状态之外的显存占用,包括激活值(activation)、各种临时缓冲区(buffer)以及无法使用的显存碎片(fragmentation)。
显然,激活在训练中也会消耗大量的显存。一个具体的例子,模型为1.5B的GPT-2,序列长度为1K,batch size为32,则消耗显存为60GB。Activation checkpointing(或者activation recomputation)则是一种常见的降低激活占用显存的方法。该方法以33%的重计算为代价,将激活的显存占用减少至总激活的均分更。即激活显存占用从60GB降低至8GB。
尽管激活的显存占用已经显著减少,但是对于更大的模型来说,激活所占用的显存也会非常大。例如,对于100B参数量的GPT模型且batch size为32,即使用来activation checkpointing,显存占用也需要60GB。
临时缓存区(Temporary buffers)。对于大模型,用于存储中间结果的临时buffer也会消耗大量显存。例如在all-reduce时,需要一个平坦的buffer来融合所有的梯度,从而改善吞吐量。例如,跨设备的all-reduce操作会随着消息的增大而增加。虽然,梯度本文是fp16的张量,但是有些操作中可能需要融合的buffer为fp32。当模型尺寸很大时,临时的buffer也不小。例如,对于1.5B参数的模型,一个fp32的buffer需要6GB的显存。
显存碎片。即使在有足够显存的情况下,也可能会导致Out of Memory,这是由于显存碎片导致的。在进程发出显存请求时,如果没有连续的显存来满足请求,即使总的显存仍然足够,该请求也会失败。当训练非常大的模型时,可以观察到明显的显存碎片。极端情况下,可能会导致30%的显存碎片。
三 ZeRO-DP
ZeRO-DP(Zero Redundancy Optimizer-Data Parallelism)是来自于论文《ZeRO: Memory Optimizations Toward Training Trillion Parameter Models》中的一种显存优化方法ZeRO的核心部分。通过该方法可以大幅度的优化显存占用,从而在有限的资源下训练更大的模型。
针对模型状态的存储优化(去除冗余),ZeRO使用的方法是分片(partition),即每张卡只存 1/N的模型状态量,这样系统内只维护一份模型状态。
这里os指的是optimizer

第二列给出了一个示例: K=12,Ψ=7.5B,N=64 可以看到显存优化相当明显。
在标准的数据并行中,每个显卡(rank)都会保存独立的权重、梯度和优化器状态,如上图中的baseline所示。那么每个显卡是否有必要存储全部的这些信息呢?ZeRO-DP的答案是不需要。ZeRO-DP能够对模型状态(权重、梯度和优化器状态)进行划分(不像标准DP那样进行复制),然后通过动态通信调度来最小化通信开销。ZeRO-DP能够在保持整体通信开销接近标准DP的同时,线性地降低模型的单显卡显存占用。
3.1. ZeRO-DP的细节
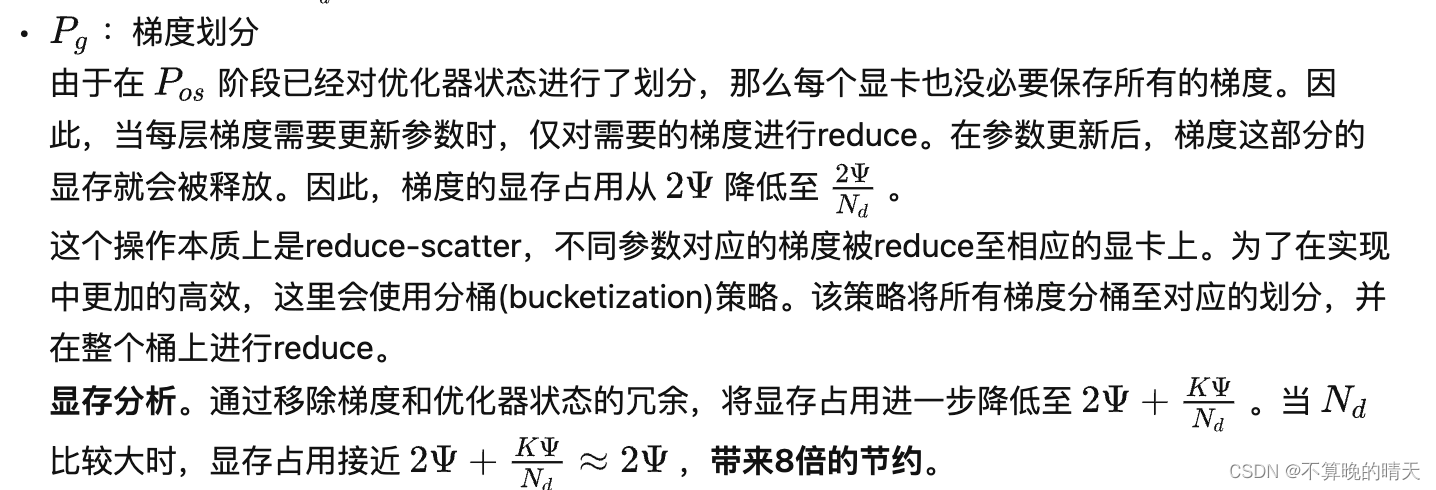
总的来说,ZeRO-DP可以分为三个阶段:Pos, Pg, Pp 。三个阶段对应优化器状态划分、梯度划分和模型参数划分,并且三个阶段可以叠加使用(上图展示了三个阶段的叠加)。关于三个阶段是否会增加通信量,会在后面分析,目前先接受这三个阶段并不会显著增加通信开销。

在DeepSpeed中,一般使用ZeRO-1就足够了。

3.2 ZeRO-DP通信量
ZeRO通过去除显存的冗余来提升模型尺寸,那么该方法是否是通过通信量换取的显存效率。换句话说,ZeRO-DP相较于标准DP来说,通信量增大了吗?
答案分为两部分:(1) ZeRO-DP在使用 Pos 和 Pg的情况下,能够带来8倍的显存降低且不增加额外的通信量;(2) 当同时使用 Pos 、 Pg 和 Pp时,通信量增加1.5倍,同时降低倍的显存。
在分析之前,我们先回顾下常用的集合通信(collective communication)函数Collective Operations。
a. 标准数据并行的通信量
在标准的数据并行训练中,在反向传播结束后,跨显卡的梯度会被平均。这个平均的过程使用all-reduce。对于大尺寸的模型,all-reduce通信是整个通信带宽的上界,因此分析主要集中在all-reduce上。
传统数据数据并行在每一步(step/iteration)计算梯度后,需要进行一次AllReduce操作来计算梯度均值,目前常用的是Ring AllReduce,分为ReduceScatter和AllGather两步,每张卡的通信数据量(发送+接受)。总的来说,单个显卡在reduce-scatter或者all-gather的过程中,都会有 Ψ 的通信量。那么,整个all-reduce的单显卡通信量为 2Ψ 。
与huggingface结合
安装 DeepSpeed:
pip install deepspeed
- 在训练脚本中导入 DeepSpeed 模块:
- 在训练脚本中导入 Trainer 模块:
- 创建 Trainer 对象,将模型、训练数据集、优化器等参数传入:
import deepspeed
from transformers import Trainer
trainer = Trainer(
model=model,
args=args,
train_dataset=train_dataset,
data_collator=data_collator,
optimizer=optimizer,
)
trainer.train()
- 使用 DeepSpeed 命令行工具运行训练脚本(单机):
deepspeed --num_gpus=8 train.py
其中,--num_gpus 表示使用的 GPU 数量。
多节点:
deepspeed --hostfile=hostfile --master_port 60000 --include="node1:0,1,2,3@node2:0,1,2,3" run.py \
--deepspeed ds_config.json
hostfile
增加hostfile文件,填写host的相应的gpu数量(slots=4代表有4个gpu)
node1_ip slots=4
node2_ip slots=4
include参数,指定机器和gpu,如下代表使用host1机器的3号和host2的2、3号gpu
ds_config.json
{
"fp16": {
"enabled": true,
"loss_scale": 0,
"loss_scale_window": 1000,
"initial_scale_power": 16,
"hysteresis": 2,
"min_loss_scale": 1
},
"optimizer": {
"type": "AdamW",
"params": {
"lr": 3e-5,
"betas": [0.8, 0.999],
"eps": 1e-8,
"weight_decay": 3e-7
}
},
"scheduler": {
"type": "WarmupLR",
"params": {
"warmup_min_lr": 0,
"warmup_max_lr": 3e-5,
"warmup_num_steps": 500
}
},
"zero_optimization": {
"stage": 3,
"offload_optimizer": {
"device": "cpu",
"pin_memory": true
},
"offload_param": {
"device": "cpu",
"pin_memory": true
},
"overlap_comm": true,
"contiguous_gradients": true,
"sub_group_size": 1e9,
"reduce_bucket_size": 1e6,
"stage3_prefetch_bucket_size": 0.94e6,
"stage3_param_persistence_threshold": 1e4,
"stage3_max_live_parameters": 1e9,
"stage3_max_reuse_distance": 1e9,
"stage3_gather_16bit_weights_on_model_save": true
},
"steps_per_print": 2000,
"wall_clock_breakdown": false
}