STM32使用RFID读卡器
RFID卡片
-
ID卡(身份标识):作用就是比如你要输入学号,你刷卡直接就相当于输入学号,省去了输入的过程
-
IC卡:集成电路卡,是将一种微电子芯片嵌入卡片之中
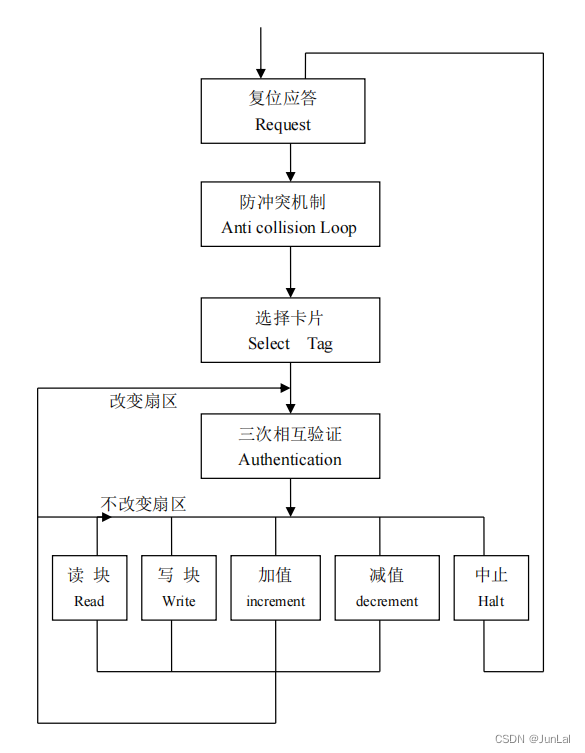
RFID的操作
1、初始化
(1)请求卡—寻找附近所有信号的卡
(2)防碰撞—选择一张信号最强的卡(得到卡的ID)
(3)选卡—选择一张要通信的卡
(4)密钥验证—验证身份
(5)读写卡片—数据读写

2、接线引脚表
| RFID | STM32 |
|---|---|
| SDA | PA4(SPI1_NSS) |
| SCK | PA5(SPI1_SCK) |
| MOSI | PA7(SPI1_MOSI) |
| MISO | PA6(SPI1_MISO) |
| IRQ | 悬空 |
| GND | GND |
| RST | PA12 |
| 3V3 | 3.3v |
3、代码
厂家给的测试代码改写
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "mfrc522.h"
#include "ZigBee.h"
#include "relay.h"
#define MAXRLEN 18
void MFRC522_Init(void) {
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable the GPIO Clock */
RCC_APB2PeriphClockCmd(MF522_RST_CLK, ENABLE);
/* Configure the GPIO pin */
GPIO_InitStructure.GPIO_Pin = MF522_RST_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(MF522_RST_PORT, &GPIO_InitStructure);
/* Enable the GPIO Clock */
RCC_APB2PeriphClockCmd(MF522_MISO_CLK, ENABLE);
/* Configure the GPIO pin */
GPIO_InitStructure.GPIO_Pin = MF522_MISO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(MF522_MISO_PORT, &GPIO_InitStructure);
/* Enable the GPIO Clock */
RCC_APB2PeriphClockCmd(MF522_MOSI_CLK, ENABLE);
/* Configure the GPIO pin */
GPIO_InitStructure.GPIO_Pin = MF522_MOSI_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(MF522_MOSI_PORT, &GPIO_InitStructure);
/* Enable the GPIO Clock */
RCC_APB2PeriphClockCmd(MF522_SCK_CLK, ENABLE);
/* Configure the GPIO pin */
GPIO_InitStructure.GPIO_Pin = MF522_SCK_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(MF522_SCK_PORT, &GPIO_InitStructure);
/* Enable the GPIO Clock */
RCC_APB2PeriphClockCmd(MF522_NSS_CLK, ENABLE);
/* Configure the GPIO pin */
GPIO_InitStructure.GPIO_Pin = MF522_NSS_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(MF522_NSS_PORT, &GPIO_InitStructure);
/* Enable the GPIO Clock */
RCC_APB2PeriphClockCmd(LED_CLK, ENABLE);
PcdReset();
PcdAntennaOn();
}
/
//功 能:寻卡
//参数说明: req_code[IN]:寻卡方式
// 0x52 = 寻感应区内所有符合14443A标准的卡
// 0x26 = 寻未进入休眠状态的卡
// pTagType[OUT]:卡片类型代码
// 0x4400 = Mifare_UltraLight
// 0x0400 = Mifare_One(S50)
// 0x0200 = Mifare_One(S70)
// 0x0800 = Mifare_Pro(X)
// 0x4403 = Mifare_DESFire
//返 回: 成功返回MI_OK
/
char PcdRequest(unsigned char req_code,unsigned char *pTagType)
{
char status;
unsigned int unLen;
unsigned char ucComMF522Buf[MAXRLEN];
// unsigned char xTest ;
ClearBitMask(Status2Reg,0x08);
WriteRawRC(BitFramingReg,0x07);
// xTest = ReadRawRC(BitFramingReg);
// if(xTest == 0x07 )
// { LED_GREEN =0 ;}
// else {LED_GREEN =1 ;while(1){}}
SetBitMask(TxControlReg,0x03);
ucComMF522Buf[0] = req_code;
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,1,ucComMF522Buf,&unLen);
// if(status == MI_OK )
// { LED_GREEN =0 ;}
// else {LED_GREEN =1 ;}
if ((status == MI_OK) && (unLen == 0x10))
{
*pTagType = ucComMF522Buf[0];
*(pTagType+1) = ucComMF522Buf[1];
}
else
{ status = MI_ERR; }
return status;
}
/
//功 能:防冲撞
//参数说明: pSnr[OUT]:卡片序列号,4字节
//返 回: 成功返回MI_OK
/
char PcdAnticoll(unsigned char *pSnr)
{
char status;
unsigned char i,snr_check=0;
unsigned int unLen;
unsigned char ucComMF522Buf[MAXRLEN];
ClearBitMask(Status2Reg,0x08);
WriteRawRC(BitFramingReg,0x00);
ClearBitMask(CollReg,0x80);
ucComMF522Buf[0] = PICC_ANTICOLL1;
ucComMF522Buf[1] = 0x20;
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,2,ucComMF522Buf,&unLen);
if (status == MI_OK)
{
for (i=0; i<4; i++)
{
*(pSnr+i) = ucComMF522Buf[i];
snr_check ^= ucComMF522Buf[i];
}
if (snr_check != ucComMF522Buf[i])
{ status = MI_ERR; }
}
SetBitMask(CollReg,0x80);
return status;
}
/
//功 能:选定卡片
//参数说明: pSnr[IN]:卡片序列号,4字节
//返 回: 成功返回MI_OK
/
char PcdSelect(unsigned char *pSnr)
{
char status;
unsigned char i;
unsigned int unLen;
unsigned char ucComMF522Buf[MAXRLEN];
ucComMF522Buf[0] = PICC_ANTICOLL1;
ucComMF522Buf[1] = 0x70;
ucComMF522Buf[6] = 0;
for (i=0; i<4; i++)
{
ucComMF522Buf[i+2] = *(pSnr+i);
ucComMF522Buf[6] ^= *(pSnr+i);
}
CalulateCRC(ucComMF522Buf,7,&ucComMF522Buf[7]);
ClearBitMask(Status2Reg,0x08);
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,9,ucComMF522Buf,&unLen);
if ((status == MI_OK) && (unLen == 0x18))
{ status = MI_OK; }
else
{ status = MI_ERR; }
return status;
}
/
//功 能:验证卡片密码
//参数说明: auth_mode[IN]: 密码验证模式
// 0x60 = 验证A密钥
// 0x61 = 验证B密钥
// addr[IN]:块地址
// pKey[IN]:密码
// pSnr[IN]:卡片序列号,4字节
//返 回: 成功返回MI_OK
/
char PcdAuthState(unsigned char auth_mode,unsigned char addr,unsigned char *pKey,unsigned char *pSnr)
{
char status;
unsigned int unLen;
unsigned char i,ucComMF522Buf[MAXRLEN];
ucComMF522Buf[0] = auth_mode;
ucComMF522Buf[1] = addr;
for (i=0; i<6; i++)
{ ucComMF522Buf[i+2] = *(pKey+i); }
for (i=0; i<6; i++)
{ ucComMF522Buf[i+8] = *(pSnr+i); }
// memcpy(&ucComMF522Buf[2], pKey, 6);
// memcpy(&ucComMF522Buf[8], pSnr, 4);
status = PcdComMF522(PCD_AUTHENT,ucComMF522Buf,12,ucComMF522Buf,&unLen);
if ((status != MI_OK) || (!(ReadRawRC(Status2Reg) & 0x08)))
{ status = MI_ERR; }
return status;
}
/
//功 能:读取M1卡一块数据
//参数说明: addr[IN]:块地址
// pData[OUT]:读出的数据,16字节
//返 回: 成功返回MI_OK
/
char PcdRead(unsigned char addr,unsigned char *pData)
{
char status;
unsigned int unLen;
unsigned char i,ucComMF522Buf[MAXRLEN];
ucComMF522Buf[0] = PICC_READ;
ucComMF522Buf[1] = addr;
CalulateCRC(ucComMF522Buf,2,&ucComMF522Buf[2]);
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,4,ucComMF522Buf,&unLen);
if ((status == MI_OK) && (unLen == 0x90))
// { memcpy(pData, ucComMF522Buf, 16); }
{
for (i=0; i<16; i++)
{ *(pData+i) = ucComMF522Buf[i]; }
}
else
{ status = MI_ERR; }
return status;
}
/
//功 能:写数据到M1卡一块
//参数说明: addr[IN]:块地址
// pData[IN]:写入的数据,16字节
//返 回: 成功返回MI_OK
/
char PcdWrite(unsigned char addr,unsigned char *pData)
{
char status;
unsigned int unLen;
unsigned char i,ucComMF522Buf[MAXRLEN];
ucComMF522Buf[0] = PICC_WRITE;
ucComMF522Buf[1] = addr;
CalulateCRC(ucComMF522Buf,2,&ucComMF522Buf[2]);
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,4,ucComMF522Buf,&unLen);
if ((status != MI_OK) || (unLen != 4) || ((ucComMF522Buf[0] & 0x0F) != 0x0A))
{ status = MI_ERR; }
if (status == MI_OK)
{
//memcpy(ucComMF522Buf, pData, 16);
for (i=0; i<16; i++)
{ ucComMF522Buf[i] = *(pData+i); }
CalulateCRC(ucComMF522Buf,16,&ucComMF522Buf[16]);
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,18,ucComMF522Buf,&unLen);
if ((status != MI_OK) || (unLen != 4) || ((ucComMF522Buf[0] & 0x0F) != 0x0A))
{ status = MI_ERR; }
}
return status;
}
/
//功 能:命令卡片进入休眠状态
//返 回: 成功返回MI_OK
/
char PcdHalt(void)
{
unsigned int unLen;
unsigned char ucComMF522Buf[MAXRLEN];
ucComMF522Buf[0] = PICC_HALT;
ucComMF522Buf[1] = 0;
CalulateCRC(ucComMF522Buf,2,&ucComMF522Buf[2]);
PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,4,ucComMF522Buf,&unLen);
return MI_OK;
}
/
//用MF522计算CRC16函数
/
void CalulateCRC(unsigned char *pIndata,unsigned char len,unsigned char *pOutData)
{
unsigned char i,n;
ClearBitMask(DivIrqReg,0x04);
WriteRawRC(CommandReg,PCD_IDLE);
SetBitMask(FIFOLevelReg,0x80);
for (i=0; i<len; i++)
{ WriteRawRC(FIFODataReg, *(pIndata+i)); }
WriteRawRC(CommandReg, PCD_CALCCRC);
i = 0xFF;
do
{
n = ReadRawRC(DivIrqReg);
i--;
}
while ((i!=0) && !(n&0x04));
pOutData[0] = ReadRawRC(CRCResultRegL);
pOutData[1] = ReadRawRC(CRCResultRegM);
}
/
//功 能:复位RC522
//返 回: 成功返回MI_OK
/
char PcdReset(void)
{
RST_H;
delay_10ms(1);
RST_L;
delay_10ms(1);
RST_H;
delay_10ms(10);
// if(ReadRawRC(0x02) == 0x80)
// {
// LED_ON;
// delay_10ms(10);
// LED_OFF;
// delay_10ms(10);
// LED_ON;
// delay_10ms(10);
// LED_OFF;
// delay_10ms(10);
// }
WriteRawRC(CommandReg,PCD_RESETPHASE);
WriteRawRC(ModeReg,0x3D); //和Mifare卡通讯,CRC初始值0x6363
WriteRawRC(TReloadRegL,30);
WriteRawRC(TReloadRegH,0);
WriteRawRC(TModeReg,0x8D);
WriteRawRC(TPrescalerReg,0x3E);
WriteRawRC(TxAutoReg,0x40);
return MI_OK;
}
//
//设置RC632的工作方式
//
char M500PcdConfigISOType(unsigned char type)
{
if (type == 'A') //ISO14443_A
{
ClearBitMask(Status2Reg,0x08);
/* WriteRawRC(CommandReg,0x20); //as default
WriteRawRC(ComIEnReg,0x80); //as default
WriteRawRC(DivlEnReg,0x0); //as default
WriteRawRC(ComIrqReg,0x04); //as default
WriteRawRC(DivIrqReg,0x0); //as default
WriteRawRC(Status2Reg,0x0);//80 //trun off temperature sensor
WriteRawRC(WaterLevelReg,0x08); //as default
WriteRawRC(ControlReg,0x20); //as default
WriteRawRC(CollReg,0x80); //as default
*/
WriteRawRC(ModeReg,0x3D);//3F
/* WriteRawRC(TxModeReg,0x0); //as default???
WriteRawRC(RxModeReg,0x0); //as default???
WriteRawRC(TxControlReg,0x80); //as default???
WriteRawRC(TxSelReg,0x10); //as default???
*/
WriteRawRC(RxSelReg,0x86);//84
// WriteRawRC(RxThresholdReg,0x84);//as default
// WriteRawRC(DemodReg,0x4D); //as default
// WriteRawRC(ModWidthReg,0x13);//26
WriteRawRC(RFCfgReg,0x7F); //4F
/* WriteRawRC(GsNReg,0x88); //as default???
WriteRawRC(CWGsCfgReg,0x20); //as default???
WriteRawRC(ModGsCfgReg,0x20); //as default???
*/
WriteRawRC(TReloadRegL,30);//tmoLength);// TReloadVal = 'h6a =tmoLength(dec)
WriteRawRC(TReloadRegH,0);
WriteRawRC(TModeReg,0x8D);
WriteRawRC(TPrescalerReg,0x3E);
// PcdSetTmo(106);
delay_10ms(1);
PcdAntennaOn();
}
else{ return (char)-1; }
return MI_OK;
}
/
//功 能:读RC632寄存器
//参数说明:Address[IN]:寄存器地址
//返 回:读出的值
/
unsigned char ReadRawRC(unsigned char Address)
{
unsigned char i, ucAddr;
unsigned char ucResult=0;
NSS_L;
ucAddr = ((Address<<1)&0x7E)|0x80;
for(i=8;i>0;i--)
{
SCK_L;
if(ucAddr&0x80)
MOSI_H;
else
MOSI_L;
SCK_H;
ucAddr <<= 1;
}
for(i=8;i>0;i--)
{
SCK_L;
ucResult <<= 1;
SCK_H;
if(READ_MISO == 1)
ucResult |= 1;
}
NSS_H;
SCK_H;
return ucResult;
}
/
//功 能:写RC632寄存器
//参数说明:Address[IN]:寄存器地址
// value[IN]:写入的值
/
void WriteRawRC(unsigned char Address, unsigned char value)
{
unsigned char i, ucAddr;
SCK_L;
NSS_L;
ucAddr = ((Address<<1)&0x7E);
for(i=8;i>0;i--)
{
if(ucAddr&0x80)
MOSI_H;
else
MOSI_L;
SCK_H;
ucAddr <<= 1;
SCK_L;
}
for(i=8;i>0;i--)
{
if(value&0x80)
MOSI_H;
else
MOSI_L;
SCK_H;
value <<= 1;
SCK_L;
}
NSS_H;
SCK_H;
}
/
//功 能:置RC522寄存器位
//参数说明:reg[IN]:寄存器地址
// mask[IN]:置位值
/
void SetBitMask(unsigned char reg,unsigned char mask)
{
char tmp = 0x0;
tmp = ReadRawRC(reg);
WriteRawRC(reg,tmp | mask); // set bit mask
}
/
//功 能:清RC522寄存器位
//参数说明:reg[IN]:寄存器地址
// mask[IN]:清位值
/
void ClearBitMask(unsigned char reg,unsigned char mask)
{
char tmp = 0x0;
tmp = ReadRawRC(reg);
WriteRawRC(reg, tmp & ~mask); // clear bit mask
}
/
//功 能:通过RC522和ISO14443卡通讯
//参数说明:Command[IN]:RC522命令字
// pInData[IN]:通过RC522发送到卡片的数据
// InLenByte[IN]:发送数据的字节长度
// pOutData[OUT]:接收到的卡片返回数据
// *pOutLenBit[OUT]:返回数据的位长度
/
char PcdComMF522(unsigned char Command,
unsigned char *pInData,
unsigned char InLenByte,
unsigned char *pOutData,
unsigned int *pOutLenBit)
{
char status = MI_ERR;
unsigned char irqEn = 0x00;
unsigned char waitFor = 0x00;
unsigned char lastBits;
unsigned char n;
unsigned int i;
switch (Command)
{
case PCD_AUTHENT:
irqEn = 0x12;
waitFor = 0x10;
break;
case PCD_TRANSCEIVE:
irqEn = 0x77;
waitFor = 0x30;
break;
default:
break;
}
WriteRawRC(ComIEnReg,irqEn|0x80);
ClearBitMask(ComIrqReg,0x80);
WriteRawRC(CommandReg,PCD_IDLE);
SetBitMask(FIFOLevelReg,0x80);
for (i=0; i<InLenByte; i++)
{ WriteRawRC(FIFODataReg, pInData[i]); }
WriteRawRC(CommandReg, Command);
if (Command == PCD_TRANSCEIVE)
{ SetBitMask(BitFramingReg,0x80); }
// i = 600;//根据时钟频率调整,操作M1卡最大等待时间25ms
i = 2000;
do
{
n = ReadRawRC(ComIrqReg);
i--;
}
while ((i!=0) && !(n&0x01) && !(n&waitFor));
ClearBitMask(BitFramingReg,0x80);
if (i!=0)
{
if(!(ReadRawRC(ErrorReg)&0x1B))
{
status = MI_OK;
if (n & irqEn & 0x01)
{ status = MI_NOTAGERR; }
if (Command == PCD_TRANSCEIVE)
{
n = ReadRawRC(FIFOLevelReg);
lastBits = ReadRawRC(ControlReg) & 0x07;
if (lastBits)
{ *pOutLenBit = (n-1)*8 + lastBits; }
else
{ *pOutLenBit = n*8; }
if (n == 0)
{ n = 1; }
if (n > MAXRLEN)
{ n = MAXRLEN; }
for (i=0; i<n; i++)
{ pOutData[i] = ReadRawRC(FIFODataReg); }
}
}
else
{ status = MI_ERR; }
}
SetBitMask(ControlReg,0x80); // stop timer now
WriteRawRC(CommandReg,PCD_IDLE);
return status;
}
/
//开启天线
//每次启动或关闭天险发射之间应至少有1ms的间隔
/
void PcdAntennaOn()
{
unsigned char i;
i = ReadRawRC(TxControlReg);
if (!(i & 0x03))
{
SetBitMask(TxControlReg, 0x03);
}
}
/
//关闭天线
/
void PcdAntennaOff()
{
ClearBitMask(TxControlReg, 0x03);
}
//等待卡离开
void WaitCardOff(void)
{
char status;
unsigned char TagType[2];
while(1)
{
status = PcdRequest(REQ_ALL, TagType);
if(status)
{
status = PcdRequest(REQ_ALL, TagType);
if(status)
{
status = PcdRequest(REQ_ALL, TagType);
if(status)
{
return;
}
}
}
delay_10ms(100);
}
}
void MFRC522_Judge(void) {
char status;
unsigned char snr, buf[16], TagType[2], SelectedSnr[4], DefaultKey[6] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF};
status= PcdRequest(REQ_ALL,TagType); // 寻卡
if(!status)
{
status = PcdAnticoll(SelectedSnr); // 防碰撞
if(!status)
{
status=PcdSelect(SelectedSnr); // 选卡
if(!status)
{
snr = 1; //扇区号1
status = PcdAuthState(KEYA, (snr*4+3), DefaultKey, SelectedSnr);// 验证卡片密码 校验1扇区密码,密码位于每一扇区第3块
{
if(!status)
{
status = PcdRead((snr*4+0), buf); // 读卡,读取1扇区0块数据到buf[0]-buf[16]
//status = PcdWrite((snr*4+0), "12345678"); // 写卡,将buf[0]-buf[16]写入1扇区0块
if(strcmp((char *)buf, "12345678") == 0){
printf("\r\n密码正确... \r\n");
}
else {
printf("\r\n密码错误... \r\n");
}
if(!status) WaitCardOff(); //等待卡离开
}
}
}
}
}
}