边缘应用中,机电控制是一项非常重要的能力。
当我们的智能设备在远端环境中,根据所识别的状况变化去执行应对措施,更大程度度地降低对人为操作的依赖,这些都是能产生更大经济效益的应用,包括无人驾驶车、自动机械手臂等等。
实际工业应用场景中的控制元件是非常多样化的,不过在实验室或小规模应用时,“脉冲宽度调制(PWM)模拟控制方式”是比较常用的方法,其执行原理在网上有非常丰富的专业知识,这里不多做赘述,只提供基本的控制方法与代码。
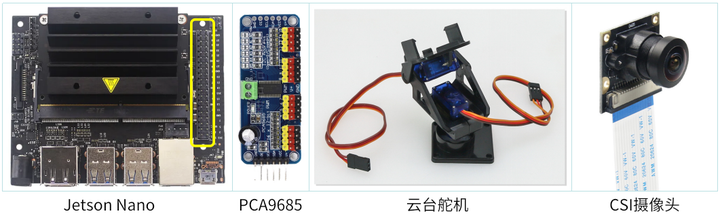
为了配合Jetson Nano完成最基本的机电控制实验,我们需要额外采购一片PCA9685控制板与一组简单的云舵机平台,二者合计大约30元人民币,如果想要实现“摄像头跟踪目标”功能,就需要再添购一个100多元的CSI摄像头(IMX-219规格),这些部件都能轻易在网上购买,并且组装难度不高,请读者自行处理。
Jetson Nano开发套件提供一组与树莓派兼容的40针扩充接口,如上图左黄色框标出的位置。
透过I2C总线进行连接是最便捷的方式,Jetson Nano提供两组I2C总线,为了让整个接线最简单,这里使用针脚3(SDA)与针脚5(SCL)这组控制总线,搭配针脚1(3V3)、针脚2(5V)与针脚6(GND)的供电针脚,用“双母头杜邦线”为Jetson Nao与PCA9685按照下图进行连接