原创 | 文 BFT机器人

得益于高度灵活的颈部,鸟类可以做很多事情,无论是转过头梳理自己的后背,在飞行过程中“眼观六路”,还是在地面或树上难以触及的角落和缝隙寻找食物。而在所有鸟类中,鸵鸟以其结实灵巧的颈部脱颖而出——这一特性对于机械臂来说同样具有吸引力。
近期,东京大学研究团队对鸵鸟的颈部进行了详细的解剖,发现了一种特定的肌肉-肌腱骨骼结构,并提出了一种新的控制方法,创造出一种新型机械臂——RobOstrich。这一研究成果也发表在了《IEEE Robotics and Automation Letters.》上。
论文地址:https://ieeexplore.ieee.org/document/10093845
01
灵感来源
一直以来,生物学都是柔性机器人研究人员的灵感来源,研究人员通过观察生物学原型,以寻求启发将工作原理运用到机械设计中。
目前,已有许多模仿动物驱动的柔性机械臂,这些机械臂往往具有高度自由度和可变形性。例如,猿猴凭借其比人更灵活强壮的手臂,能在丛林间自如穿梭,研究人员通过观察猿猴手臂的骨骼结构和肌肉系统,设计出类似的机械臂,使机械臂效率更高、更轻盈。
动物躯干的椎骨由光滑的软骨连接,由多条发达的肌腱驱动。因此,躯干可以被视为欠驱动驱动系统的柔性机械臂结构,而肌腱驱动机制也因其简单有效的特点而得到广泛应用。在动物躯干中,鸟类的颈部大约有20个颈椎,而哺乳动物只有7个,并且鸟类的颈椎能实现双方向弯曲,表现出极高的自由度。
鸵鸟作为体型最大的鸟类,将鸵鸟的生物特征融入机械设计中,能最大限度地减少动物与机器人之间规模差异的影响。东京大学信息科学与技术研究生院的博士Kazashi Nakano表示:“我们专注于鸵鸟颈部,因为它是一项全新的挑战,有可能创造出前所未有的新事物。”

图1柔性机械臂的典型结构。(a)欠驱动系统(b)串行化的欠驱动系统
02
机器人设计
研究团队首先解剖了鸵鸟的颈部,以充分了解帮助控制重达3公斤身体的肌腱、肌肉和骨骼的底层网络,并根据解剖数据提出了一种模仿鸵鸟颈部运动的模型,构建了一种新型机械系统。
RobOstrich的肌肉和肌腱布局基于鸵鸟的生物结构。在机械手的背部,研究团队使用高强聚乙烯纤维线来模拟鸵鸟颈部肌腱。在腹侧,RobOstrich有一组肌腱驱动结构,在这组结构中,钢丝通过外部电缆连接到滑轮,并由伺服电机控制。

图2 RobOstrich机械臂的电线配置 (a)鸵鸟颈部的长肌肉发达 (b)RobOstrich实现类似鸵鸟颈部的肌肉结构
RobOstrich共有17个自由度和6个控制输入。
研究人员通过3D打印尼龙制成了17块椎骨来创建RobOstrich,并用轴承将它们连接起来,每个椎骨都能在轴承上平稳移动,关节的设计参数也受轴间距离和关节角度限制,与实际鸵鸟无二。
研究团队通过尼龙系带实现关节角度限制;在背侧使用陶瓷衬套以减少与电线的摩擦,并在两侧放置了五束钢琴线束用来模拟鸵鸟椎骨(椎间肌)之间的生物肌肉,以减少驱动所需的能量;而橡皮筋则被用作机械臂底部的韧带以提供张力,并确保机械臂在动态运动期间的安全运行。
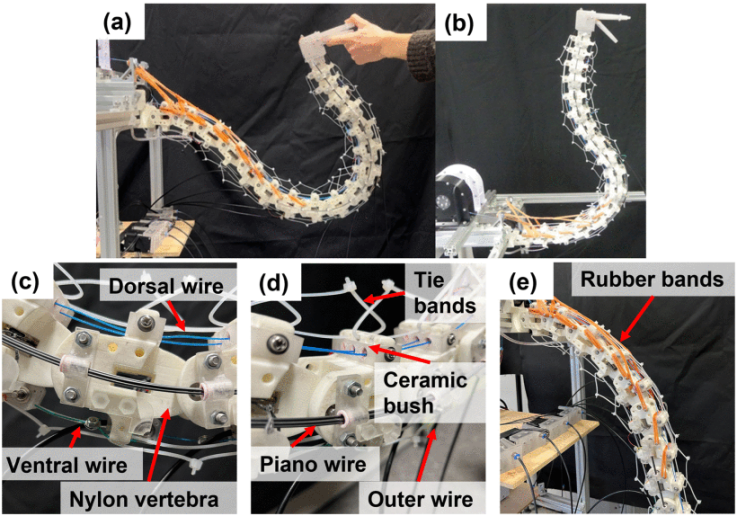
图3 RobOstrich机械臂的骨架和关节
03
实验
柔性机械臂具有高自由度和变形能力,RobOstrich是如何利用这些属性,灵活地执行任务呢?
首先是障碍物到达任务,如图(a)所示,机械臂尾部在y处固定,且由于有两个自由度,可以实现:通过线1的牵引力进行的头部运动自由度和腹侧结构的自由度;由于机械臂的变形能力,即使接触障碍物时,头侧也可以移动,此外高自由度还能以更高精度调整链接长度。
二是如图(b)所示,RobOstrich和真正的鸵鸟颈部一样,实现可“滚动模式”,其中相邻关节依次移动,而头部与地面保持水平。滚动模式的作用是减少在头部向上伸展过程中施加机械臂底部的力矩,这是展示高自由度和变形能力任务的一个很好的例子。
“灵活的结构很难控制,但优点是可以通过引入基于鸵鸟解剖结构的肌肉排列和关节运动范围来实现灵巧的伸展运动。”
研究人员表示:这种运动模式可以通过仅在颈部下方单独增加金属丝的张力来实现,而背面的金属丝长度可保持不变,换句话说——就是背部的金属丝不需要被拉。通过这种方式,机械臂可以毫不费力地实现复杂配置。
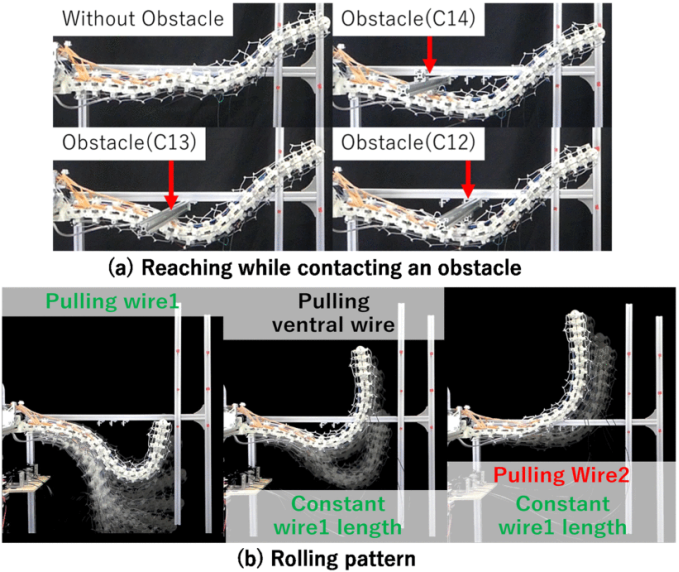
图4 RobOstrich动作灵巧
04
结语
肌腱驱动系统是驱动柔性结构的有效方法,但其存在操作灵活性、结构稳定性不够强和建模错误等痛点。针对这些问题,东京大学研究团队提出了一种基于鸵鸟颈部肌肉结构和关节角度限制的设计,并提出了一种用于欠驱动肌腱驱动柔性机械臂的新型机械系统。
通过实验表明,RobOstrich表现出与鸵鸟颈部相似的运动模式,它很灵活且结构稳定,能够进行灵敏的运动。实验结果表明使用视觉反馈对环境接触具有鲁棒性的伺服系统的未来可行性,也通过对鸵鸟颈部形态结构的建设性理解,对生物学做出了贡献。
“我们的目标是开发一种控制器,它可以在非结构化环境中执行伸展运动”,目前RobOstrich只能在2D平面上前进,但研究人员希望未来能够实现3D运动。
后续RobOstrich将进化成何种形态?我们一起拭目以待。
更多精彩内容请关注公众号:BFT机器人
本文为原创文章,版权归BFT机器人所有,如需转载请与我们联系。若您对该文章内容有任何疑问,请与我们联系,将及时回应。