无人机基础知识:多旋翼无人机自动控制原理与算法
- 前言
- 无人机自动控制器
- PID控制算法
前言
无人机(Unmanned Aerial Vehicle),指的是一种由动力驱动的、无线遥控或自主飞行、机上无人驾驶并可重复使用的飞行器,飞机通过机载的计算机系统自动对飞行的平衡进行有效的控制,并通过预先设定或飞机自动生成的复杂航线进行飞行,并在飞行过程中自动执行相关任务和异常处理。

在前面的文章中,我们分析了多旋翼无人机的飞行原理及飞行模式。
链接
在最后的飞行模式中, 除了纯手动模式外,简单解释了其它模式如姿态模式的原理,其中一笔带过就是形成了闭环控制,所以稳定。
本篇文章,我们就来仔细分析下其中的闭环控制,和控制的原理。
无人机自动控制器
对于一架具备自动飞行能力的无人机来说,控制器设计是其中最为重要的工作之一。
对于无人机来说:
控制的目标是实现对无人机的姿态跟踪、速度跟踪、定点跟踪、路径跟踪、轨迹跟踪。
在无人机的实际应用中,我们会根据实际使用需求设计一些飞行模式,比如姿态模式、悬停模式、自动航线模式等,这些模式从控制的本质上来讲就是给飞行器状态期望,让其以给定的期望状态飞行。比如姿态模式,一般是通过遥控器输出俯仰角期望、滚转角期望、偏航角速率期望、油门期望,然后控制器通过控制各电机油门实现对上述期望的跟踪。
多旋翼飞行器作为我们的控制对象,以四旋翼为例
其控制输入是:四个电机的转速
控制输出是其飞行状态,包括:
- 位置
- 速度
- 姿态
- 角速度
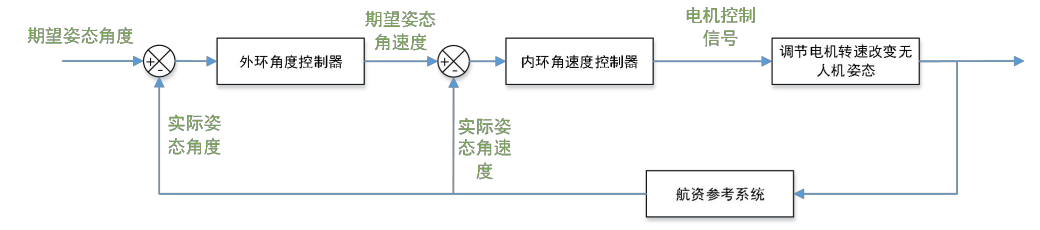
多旋翼飞行器建模建立的数学模型,它是一个高阶系统,在设计控制器的时候采用了内外环的结构,外环的控制输出作为内环的控制输入。
以其中的姿态控制为例,其控制框图如下:
对于其中的控制器,控制算法发展到现在有很多种,例如:自适应控制、反步滑膜控制、自抗扰控制等。
但是以上方法多为理论分析和数值分析,在飞控的设计中,多使用 相对成熟的PID控制算法。
PID控制算法
PID控制简介:
PID( Proportional Integral Derivative)控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好和可靠性高,被广泛应用于工业过程控制,尤其适用于可建立精确数学模型的确定性控制系统。
PID控制器的优点:
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节,它实际上是一种算法。PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
PID控制器的不足:
在实际生产现场中,由于受到参数整定方法烦杂的困扰,常规PID控制器参数往往整定不良、效果欠佳,对运行工况的适应能力很差。
PID控制器各校正环节:
任何闭环控制系统的首要任务是要稳(稳定)、快(快速)、准(准确)的响应命令。PID调整的主要工作就是如何实现这一任务。
-
比例环节
成比例地反映控制系统的偏差信号e(t),偏差一旦产生,控制器立即产生控制作用,以减小偏差。当仅有比例控制时系统输出存在稳态误差 -
积分环节
控制器的输出与输入误差信号的积分成正比关系。主要用于消除静差,提高系统的无差度。 -
微分环节
反映偏差信号的变化趋势,并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。
控制参数整定:
增大比例系数P将加快系统的响应,它的作用于输出值较快,但不能很好稳定在一个理想的数值,不良的结果是虽较能有效的克服扰动的影响,但有余差出现,过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏。积分能在比例的基础上消除余差,它能对稳定后有累积误差的系统进行误差修整,减小稳态误差。微分具有超前作用,对于具有容量滞后的控制通道,引入微分参与控制,在微分项设置得当的情况下,对于提高系统的动态性能指标,有着显著效果,它可以使系统超调量减小,稳定性增加,动态误差减小。
时域计算公式如下:

PID的信号框图
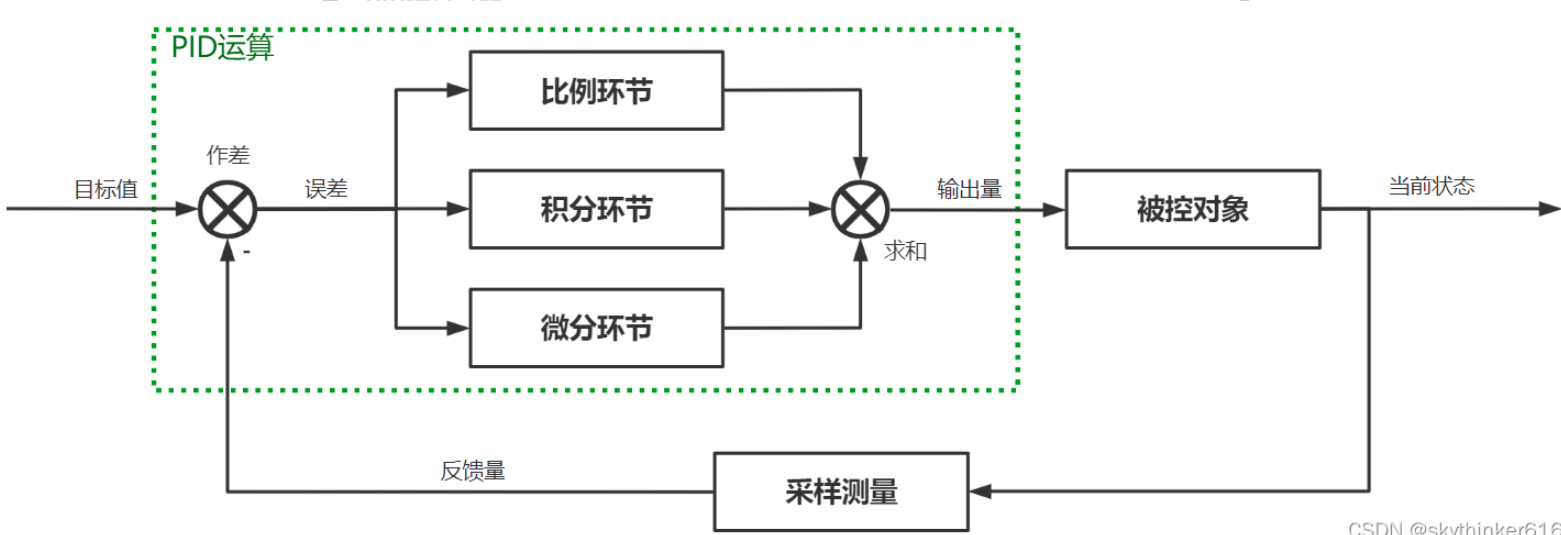
上图就是PID的信号框图,表示了PID的运行过程:
为系统指定一个目标值
PID将目标值与被控对象当前的反馈量作差得到误差
PID将误差值分别经过三个环节计算得到输出分量,三个分量加起来得到PID的输出
将PID的输出施加到被控对象上,使反馈量向目标值靠拢
串级PID:
上面所说的算法其实就是单级PID,目标值和反馈值经过一次PID计算就得到输出值并直接作为控制量,如果目标物理量和输出物理量直接不止差了一阶的话,中间阶次的物理量我们是无法控制的。
而串级PID就可以改善这一点。串级PID其实就是两个单级PID“串”在一起组成的,它的信号框图如下:
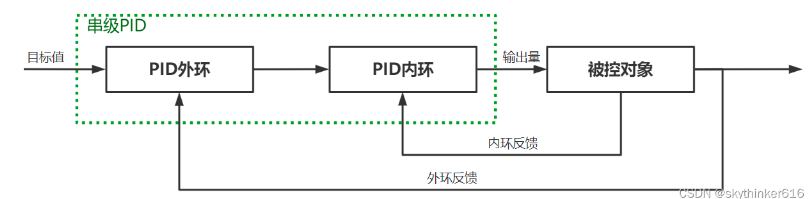
图中的外环和内环就分别是一个单级PID,每个单级PID就如我们之前所说,需要获取一个目标值和一个反馈值,然后可以产生一个输出值。串级PID中两个环相“串”的方式就是将外环的输出作为内环的目标值。





![[Linux打怪升级之路]-vim编辑器(看就能马上操作噢)](https://img-blog.csdnimg.cn/ac9210bdbf9241d3920cce5ff781e5f4.png)


![[C]带你了解C语言是如何操作文件的](https://img-blog.csdnimg.cn/201a2a531024480f8d69fcfab5061b31.png)