目录
01 前言
02 Sentinel1下载时的基本参数解释
2.1 卫星平台
2.2 产品类型
03 SLC数据和GRD数据的区别
3.1 处理过程的区别
3.2 处理操作的一点解释
3.2.1 为什么要做地形辐射校正?
3.2.2 多普勒地形校正和地形辐射校正的区别?
01 前言
最近在处理雷达数据,发现对于雷达数据不了解,正好写一篇博客,巩固一下。
在说明GRD和SLC数据之前,我们先来看看Sentinel-1数据本身的一些基本知识点。
另外,推荐大家多去官网查看资料,虽然这不方便,但是你总得有这方面的经验,不是任何时候你都可以在博客或者中文网站找到你想要的答案。
关于哨兵1号的数据文档介绍可以查看:Sentinel-1 - Missions - Sentinel Online - Sentinel Online (esa.int)
大约长这个样子:

02 Sentinel1下载时的基本参数解释
以下是欧空局-Sentinel-1的数据查询和下载时需要进行的参数选择 ,我们就从这里入手。
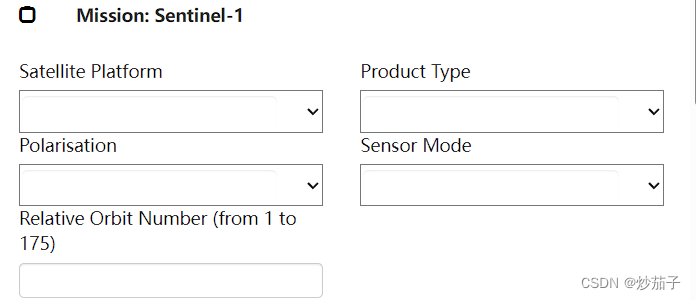
我们先来翻译一下吧
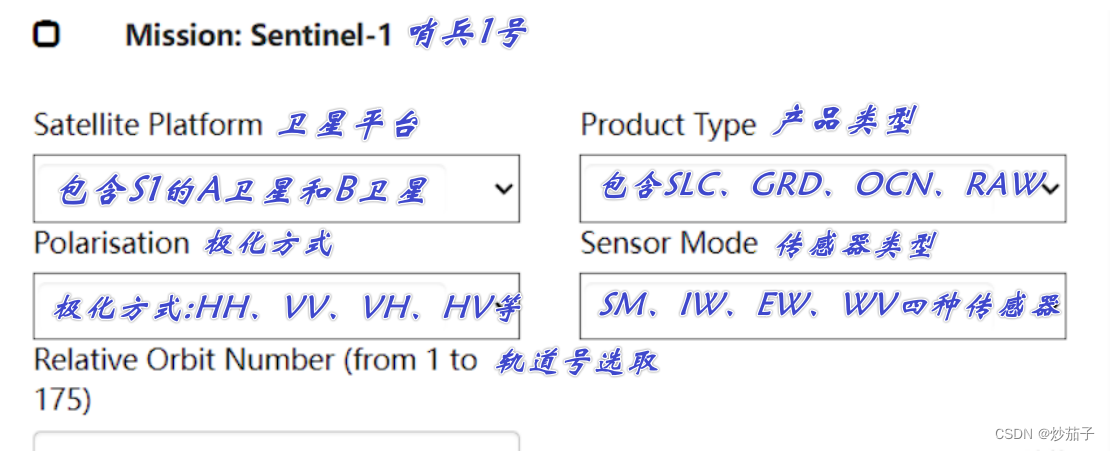
2.1 卫星平台
再来解释一下,卫星平台这个好解释,Sentinel1卫星一共发射了两个极轨卫星A卫星和B卫星(当然21年B卫星出了故障已经没有办法使用,22年又发射了C卫星不过当前在哨兵上还没法下载C卫星的数据)。
A卫星和B卫星有什么区别?
可以说几乎没有区别,Sentinel1A和Sentinel1B卫星的硬件设计和参数都是一致的,且属于同一太阳同步轨道,不过轨道相位相差180°(也就是说,它们沿着相同的轨道飞行,但是在任何时刻,它们都位于地球的两个对面位置。),如此是为了哨兵1号数据得到更短的重返周期6天(Sentinel1A和SentinelB的重返周期均为12天)。也也就是说Sentinel1A和Sentinel1B的数据一般而言是可以直接进行混用而没有太大影响的。
因此,我一般对于卫星平台都是不做选取,默认都用。
2.2 产品类型
这个大家也了解的比较多了,我给一张经典的图吧,我看大家用的都比较多(官网有):
Stripmap (SM)、Interferometric Wide Swath (IW)、Extra Wide Swath (EW)和Wave (WV)
当然,在一些博客中也有一些生动的诠释:
干涉宽幅(IW),超宽幅(EW),波(WV)和带状图(SM)
他们的区别呢?
在一份官网的Sentinel1的数据范文和产品说明书.PDF(https://sentinel.esa.int/documents/247904/1653440/Sentinel-1_Data_Access_and_Products)中这么介绍:
-
Stripmap (SM)模式:Stripmap模式是传统的SAR成像模式,它提供了较高的分辨率和较小的覆盖范围。在这种模式下,雷达脉冲在地面上连续地照射一条狭长的带状区域。SM模式的分辨率最高,可以达到5米,但覆盖范围相对较小,大约80公里宽。
-
Interferometric Wide Swath (IW)模式:IW模式是Sentinel-1的默认观测模式,它使用了一种名为地形观测拓扑的技术来实现宽视场覆盖和较高的分辨率。在IW模式下,Sentinel-1可以覆盖250公里的宽度,并保持5米*20米的分辨率。
-
Extra Wide Swath (EW)模式:EW模式也使用了地形观测拓扑的技术,但是它的覆盖范围更大,达到400公里。然而,由于其覆盖范围的增加,EW模式的分辨率较IW模式稍差,大约在20米*40米的分辨率。
-
Wave (WV)模式:WV模式是为海洋应用设计的,它使用了一种分散的观测策略来获取海面的小区域图像。WV模式的图像可以用于分析海浪的特性,例如浪高和浪向。它是20km*km的幅宽,5m*5m的分辨率。
他们的适用情况呢?说明书是这么写的:
-
Sentinel-1在陆地上主要运行在干涉宽带模式(Interferometric Wide Swath, IW),在开阔海洋上主要运行在波浪模式(Wave, WV)。
-
数据产品在波浪模式下可提供单极化(VV或HH),在SM、IW和EW模式下可提供双极化(VV+VH或HH+HV)和单极化(HH或VV)。
-
每种模式都可能产生以下级别的产品:
- 原始的Level-0数据,这些数据需要进行特殊的处理才能使用,每个产品的典型大小约为1GB。
- Level-1 Single Look Complex(SLC)数据,包括复数图像,有振幅和相位,系统分发限于特定相关区域,每个产品的典型大小约为8GB。
- Level-1 Ground Range Detected(GRD)数据,只包含多视图强度,系统分发,每个产品的典型大小约为1GB。
- Level-2 Ocean数据,用于获取海洋的地球物理参数,系统分发。
至于轨道号的选取和极化方式就不详细说明了,轨道号选取了可以更好更方便的找到你的所在区域,但是前提是你得知道自己的ROI在哪个轨道,与其这个样子我还不如赶紧绘制一个矩形ROI来的快。极化方式我不是很清楚,我本身并未学习雷达遥感所以就不献丑了。
03 SLC数据和GRD数据的区别
那么,我们再回来,他们的区别在哪里?
3.1 处理过程的区别
其实前面也讲过了,这里就讲讲它的一个处理过程的区别。
所有的Sentinel1处理流程都在这里:Sentinel-1 SAR - Technical Guide - Sentinel Online - Sentinel Online (esa.int)
GRD数据的处理过程(Ground Range Detected - Sentinel-1 SAR Technical Guide - Sentinel Online - Sentinel Online (esa.int))
SLC数据的处理过程(
Single Look Complex - Sentinel-1 SAR Technical Guide - Sentinel Online - Sentinel Online (esa.int))
我也懒得自己写的,别人写的已经很好了:
SLC 包含有聚焦的SAR 数据、用卫星轨道和姿态参数来描述的地理参考,基于斜距模式来提供。该产品采用足够的信号带宽来实现每个维度上的单视处理,采用复数来保存相位信息。SM 模式的SLC 在单极化下包含有一幅影像, IW 模式的SLC 在单极化下包含有对应于3 个条带下的3 幅影像,EW 模式的SLC在单极化下包含有对应于5 个条带下的5 幅影像。
GRD 产品包含有经过多视处理、采用WGS84 椭球投影至地距的聚焦数据,因此地距坐标是斜距坐标投影至地球椭球后的成果(斜地距转换得到地距坐标)。像素信息代表监测区域的幅度信息,而相位信息则被丢失。该产品在方位向和距离向分辨率一致,在降低斑点噪声的同时降低几何分辨率。相对于SLC 数据而言,GRD 数据消除热噪声以提高图像质量。对于IW模式和EW 模式产品,每个条带的所有小块在单独多视处理后进行无缝拼接最终形成一个连续的地距图像。
原文链接:https://blog.csdn.net/Hey_everyday/article/details/116892645
想要正常的使用GRD数据,那就还需要对其进行一些预处理,一般包括:
3.2 处理操作的一点解释
热噪声去除和轨道文件校正在Sentinel1文件中有相关参数文件,如果你使用SNAP软件进行处理,那么对于轨道文件可以自动下载精确的轨道文件进行校正;
噪声滤波这个操作比较简单,就是去除一些噪声点这个不讲;
至于辐射定标,一般而言是将传感器记录的电压或数字量化值(DN值)转换成辐射亮度、反射率等遥感物理量的过程。比如这里转化为后向散射系数。对于SAR数据而言,由于云层的穿透性,只需要做辐射定标操作即可,不存在光学影像的大气校正操作。但是后向散射系数有几种,最常见就是归一化的雷达后向散射系数(sigma0/σ 0 /sigma_0σ0),然后就是gamma0(γ 0 \gamma_0γ0)和beta0(β 0 \beta_0β0)等;
说说它们的区别:
-
Sigma0 (σ0):这是地表后向散射系数的最常见表示形式,也被称为归一化雷达截面(Normalized Radar Cross Section,NRCS)。它考虑了地表目标的大小和形状对雷达信号反射的影响。
-
Beta0 (β0):这是未归一化的后向散射系数,它反映了地表目标在雷达波束中的散射能力。它没有考虑雷达波束的形状和目标的大小。
-
Gamma0 (γ0):这是地形斜率归一化的后向散射系数。它考虑了地表斜坡对雷达信号反射的影响,因此通常用于山区或其他地形起伏较大的地方。
-
DN:这是数字数量(Digital Number),它是雷达图像原始数据的灰度值。在进行雷达反射率或后向散射系数的校正之前,雷达图像的像元值通常以DN值表示。
我们辐射定标就是将DN值转化为后向散射系数(σ0或者β0或者γ0)。其实辐射定标之后得到后向散射系数是归一化这我们知道,只在0~1之间变化有时候并不好做分析,因此我们有时候也会将后向散射系数进行转DB处理,这样子的话雷达后向散射系数的值可以在很大的范围内变化,因此在对后向散射系数进行可视化或者分析时,通常会将其转换到对数尺度上。在对数尺度上,大的和小的值可以在同一图像中更好地显示出来,而不会出现大的值压制小的值的情况。
转DB的原理其实很简单:
转DB工具会将每个像素的值替换为其对数值,通常是以10为底的对数,并且乘以10(因为分贝是以10为底的对数的10倍)。具体的转换公式是:dB = 10 * log10(value)。
当然这里还有一个多普勒地形校正,实际上就是将雷达影像的特殊坐标系基于DEM进行转换得到正常的例如WGS84坐标,其实多普勒地形校正更偏向算法一个名称,我其实比较喜欢另一个名称:地理编码。
3.2.1 为什么要做地形辐射校正?
当然,再进行地理编码之后,一般还会做地形辐射校正。
这是由于地面斜坡的影响,雷达信号在斜坡面上的分布不均,造成像元的反射强度不一致,这就是地形辐射畸变。地形辐射校正就是通过调整这些像元的反射强度,使其能够准确地反映地面的反射性质。
3.2.2 多普勒地形校正和地形辐射校正的区别?
其实已经很明显了,多普勒地形校正是将像元的位置放置在正确的坐标上(地理编码,基于DEM进行位置上的校正),而地形辐射校正则是将像元上的值基于DEM进行校正,一个是对像元的位置进行校正,另一个是对像元值进行校正。






![IM即时通讯系统[SpringBoot+Netty]——梳理(四)](https://img-blog.csdnimg.cn/d5090962295a469fa26555e5d2f0d60e.png)