2015计算机应用
整体思路和论文笔记:Hidden Markov Map MatchingThrough Noise and Sparseness_UQI-LIUWJ的博客-CSDN博客
很像,也是应用HMM进行地图匹配
| HMMM | 本文 | |||
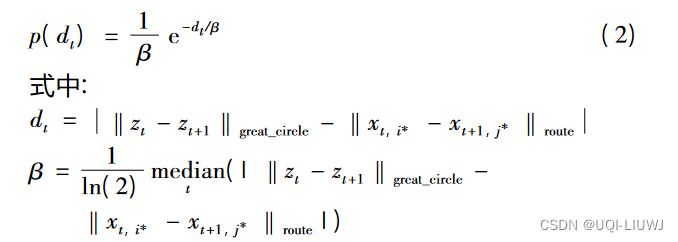
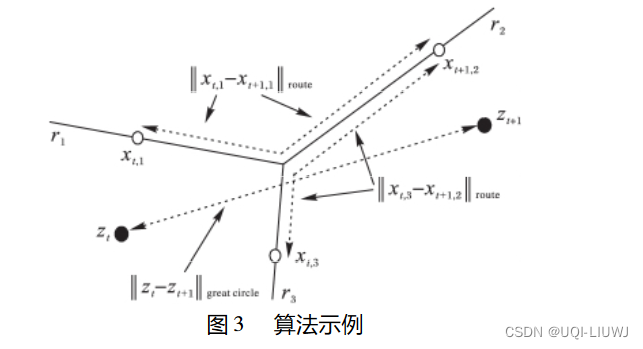
| 状态转移矩阵 | |
| ||
| 观测概率矩阵 |
|  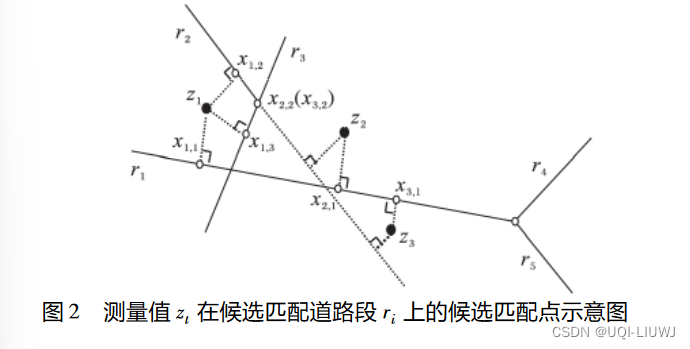 | ||
2 实验结果
2.1 GPS定位数据

去除个别异常点 后,GPS 定位点与道路能够实现较好匹配
2.2 手机信令数据
2.2.1 高采样率
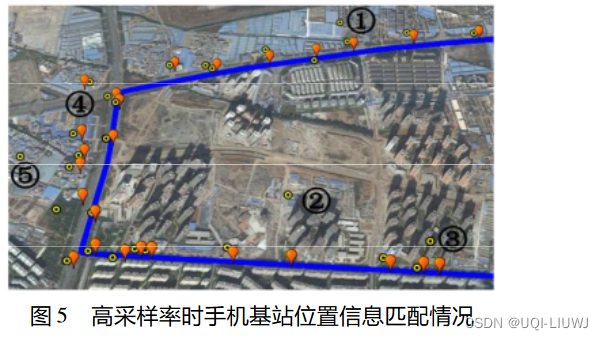
- 圆点标记表示匹配前原始手机基站定位点,水滴状标记表示匹配后位置
- 算法 对异常点的处理算法有三种
- 附近没有其他候选匹配 道路(候选匹配道路没发生改变)
- ——>则将点匹配到候选匹配道路上
- ①②③
- 附近有其他候选 匹配道路,且候选匹配道路发生改变
- ——>定位点匹配到其他候选 匹配道路上
- ④
- 定位点附近一定范围内没发现候选匹配道路
- ——>该点直接当作异常点排除
- ⑤
- 附近没有其他候选匹配 道路(候选匹配道路没发生改变)
- ——>采样率较高时,算法能够较好地完成匹配
2.2.2 低采样率
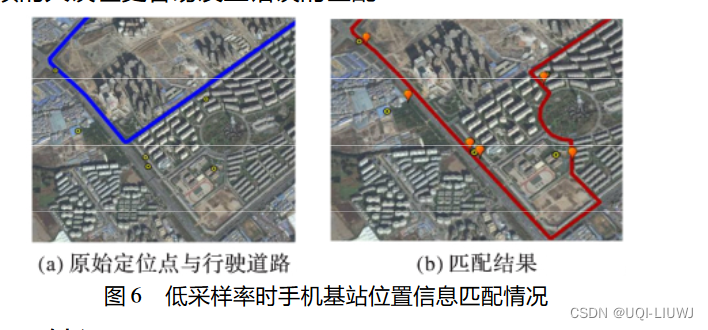
有部分路 段出现匹配错误,低采样率和大精度误差是导致发生错误匹 配的直接原因