欢迎关注更多精彩
问题描述
给定点O,线段AB,平面OP,求以OP法向为某一轴,以AB在OP上的投影为另一轴,O为原点的局部坐标系。要求给出X,Y,Z轴的单位向量,以及原点O. 求出转换到世界坐标系的旋转矩阵RT。
如图,
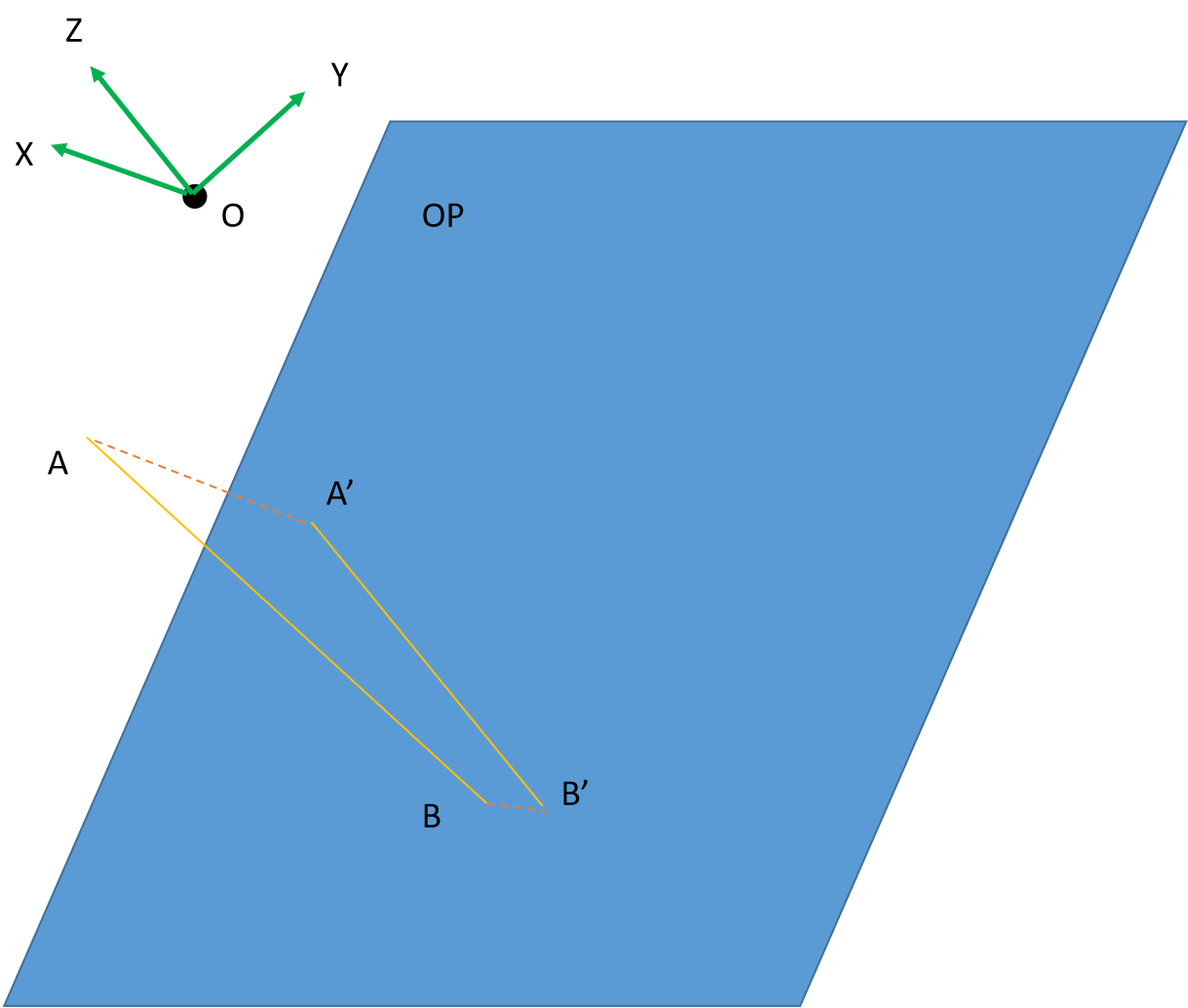
A’B’为AB在OP上的投影,坐标系中X轴平行于OP面的法向,Z轴平行于A’B’。
问题分析
关键技术难点
- 投影的计算
- 第三轴计算
- 旋转矩阵计算
投影的计算
对线段的投影可以转化成两个端点的投影。
点的投影可以认识是由点出发沿平面法向的直线与平面的交点。
具体可以参考 点击前往
第三轴计算
条件中只给出两轴,必须计算第三轴。
由于三轴两两垂直,
根据公式
Z = X × Y , X = Y × Z , Y = Z × X Z=X \times Y,X=Y\times Z,Y=Z\times X Z=X×Y,X=Y×Z,Y=Z×X
可以发现,只要给定其中两轴必定可以计算出第三轴。
旋转矩阵计算
要求返回一个形如 点击前往的旋转矩阵。
基本思路是行把原点移动到(0,0,0)点RT1,然后先把X轴旋转到重合RT2,再把Y轴旋转到重合RT3。最终结果就是RT3*RT2*RT1。
接口设计&基本步骤
坐标系计算
接口设计
接口函数:
RigidRTMatrix GenerateCoordinate(const Point & p, const Point &line_start,
const Point &line_end, const Point & plane_normal, const Point & plane_point,
CoordinateOrient line_orient, CoordinateOrient normal_orient);
参数:
出参 RigidRTMatrix 矩阵的三行代表X,Y,Z坐标,Translation代表坐标系原点位置。
| 参数名 | 类型 | 作用 | 备注 |
|---|---|---|---|
| p | 行向量 | 坐标系原点 | |
| line_start | 行向量 | 线段起点 | |
| line_end | 行向量 | 线段终点 | |
| plane_normal | 行向量 | 平面法向 | 单位向量 |
| plane_point | 行向量 | 平面上任意一点 | |
| line_orient | CoordinateOrient枚举形 | 线段投影指向代表的坐标系名称 | X,Y,Z 可选 |
| normal_orient | CoordinateOrient枚举形 | 线段投影指向代表的坐标系名称 | X,Y,Z 可选 |
基本步骤
1.计算线段投影的单位向量。
2.根据输入要求确定坐标系的两个轴。
3.根据已经确定的两轴计算剩下的一轴。
4.确定原点。
旋转矩阵计算
接口设计
接口函数:
RigidRTMatrix Coordinate2RT(const RigidRTMatrix & coordinate);
参数:
出参 RigidRTMatrix,代表局部坐标系到世界坐标系的变换矩阵。
| 参数名 | 类型 | 作用 | 备注 |
|---|---|---|---|
| coordinate | RigidRTMatrix | 局部坐标系信息 |
基本步骤
- 将坐标系原点移动致0点,矩阵为RTO
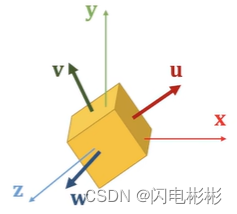
设置新坐标系是uvw,原来是xyz。
先计算矩阵A使得原坐标系转化到新坐标系。
可以列出方程出
{ A ⋅ x = u A ⋅ y = v A ⋅ z = w \left\{\begin{array}{l} A\cdot x=u\\A \cdot y = v\\A\cdot z = w\end{array}\right. ⎩ ⎨ ⎧A⋅x=uA⋅y=vA⋅z=w
u,v,w本身是正交的,且是单位向量。
原来坐标系可以组成一个单位矩阵
可以得到
A ⋅ [ 1 0 0 0 1 0 0 0 1 ] = [ u v w ] A\cdot \begin {bmatrix} 1&0&0\\0&1&0\\0&0&1 \end {bmatrix} = \begin {bmatrix} u&v&w \end{bmatrix} A⋅ 100010001 =[uvw]
∴
A
=
[
u
v
w
]
\therefore A=[u \ v \ w]
∴A=[u v w]
最终结果为
R
T
O
−
1
∗
A
T
∗
R
T
O
RTO^-1*A^T*RTO
RTO−1∗AT∗RTO
代码实现
- 代码库点击前往
- 代码库点击前往
- 代码库点击前往
坐标系计算
RigidRTMatrix GenerateCoordinate(const Point& p, const Point& line_start,
const Point& line_end, const Point& plane_normal, const Point& plane_point,
CoordinateOrient line_orient, CoordinateOrient normal_orient) {
cout << "GenerateCoordinate" << endl;
assert(abs(plane_normal.squaredNorm() - 1) < 1e-6);
RigidRTMatrix coord;
// 1.计算线段投影的单位向量。
Point project_line_start = line_start;
BasicTools::PointProjectPlane(project_line_start, plane_point, plane_normal);
Point project_line_end = line_end;
BasicTools::PointProjectPlane(project_line_end, plane_point, plane_normal);
Point project_vec = (project_line_end - project_line_start).normalized();
assert(project_vec.squaredNorm() > 1e-4);
cout <<( project_vec.squaredNorm() > 1e-4) << endl;
coord.mat.block<1, 3>(line_orient, 0) = project_vec;
// 2.根据输入要求确定坐标系的两个轴。
coord.mat.block<1, 3>(normal_orient, 0) = plane_normal;
// 3.根据已经确定的两轴计算剩下的一轴。
int left = CoordinateOrient::X + CoordinateOrient::Y + CoordinateOrient::Z;
left -= line_orient + normal_orient;
coord.mat.block<1, 3>(left, 0) = coord.mat.block<1, 3>((left + 1) % 3, 0).cross(coord.mat.block<1, 3>((left + 2) % 3, 0));
// 4.确定原点。
coord.trans = p;
return coord;
}
旋转矩阵计算
RigidRTMatrix Coordinate2RT(const RigidRTMatrix& coord) {
RigidRTMatrix res;
RigidRTMatrix RTO;
RTO.trans = -coord.trans;
RigidRTMatrix RTOInvers;
RTOInvers.trans = coord.trans;
RigidRTMatrix A;
A.mat = coord.mat.transpose();
res = A * RTO;
res = RTOInvers * res;
return res;
}
本人码农,希望通过自己的分享,让大家更容易学懂计算机知识。