ROS SMACH学习个人记录
- SMACH
- 关于抢占
- 一些Tips
- SMACH缺点
- 个人的结论
本文仅为个人学习记录,结论正确性待考究。欢迎大家讨论
SMACH
关于抢占
抢占需要在并发容器里面实现,并发容器里面包含多个状态,我们分成两类:抢占状态与被抢占状态
抢占的实现原理:
- 定义子状态结束回调函数,该函数在并发容器里面的任何状态结束时候都会调用
def child_cb(outcome_map):
rospy.loginfo('excute child call back')
return True
- 在并发容器里面增加子状态结束回调函数调用(看最后一行)
sm_con = smach.Concurrence(outcomes=['outcome4','preempted'],
default_outcome='outcome4',
outcome_map={'preempted':{ 'FOO':'outcome1','BAR':'preempted'},
'outcome4':{'BAR':'outcome2'}},
child_termination_cb = child_cb)
- 在被抢占状态里定义抢占响应(excute后面四行)
# define state Bar
class Bar(smach.State):
def __init__(self):
smach.State.__init__(self, outcomes=['outcome2','preempted'])
def execute(self, userdata):
rospy.loginfo('Executing state BAR')
if self.preempt_requested():
self.service_preempt()
return 'preempted'
rospy.sleep(50)
return 'outcome2'
- 在代码的后面增加handler
set_preempt_handler(你的状态机名)
全部代码:
#!/usr/bin/env python3
# 在并发状态机里面测试状态抢占功能
import rospy
import smach
import smach_ros
from smach_ros import ServiceState, SimpleActionState, IntrospectionServer,set_preempt_handler, MonitorState
# define state Foo
class Foo(smach.State):
def __init__(self):
smach.State.__init__(self, outcomes=['outcome1'])
self.counter = 0
def execute(self, userdata):
rospy.loginfo('Executing state FOO')
rospy.sleep(1)
return 'outcome1'
# define state Bar
class Bar(smach.State):
def __init__(self):
smach.State.__init__(self, outcomes=['outcome2','preempted'])
def execute(self, userdata):
rospy.loginfo('Executing state BAR')
if self.preempt_requested():
self.service_preempt()
return 'preempted'
# n=1
# while n<50:
# rospy.sleep(1)
# rospy.loginfo('Do something')
# n+=1
# Check for preempt
rospy.sleep(50)
return 'outcome2'
# define state Bas
class Bas(smach.State):
def __init__(self):
smach.State.__init__(self, outcomes=['outcome3'])
def execute(self, userdata):
rospy.loginfo('Executing state BAS')
return 'outcome3'
def child_cb(outcome_map):
rospy.loginfo('excute child call back')
return True
def main():
rospy.init_node('smach_example_state_machine')
# Create the top level SMACH state machine
sm_top = smach.StateMachine(outcomes=['outcome6'])
# Open the container
with sm_top:
smach.StateMachine.add('BAS', Bas(),
transitions={'outcome3':'CON'})
# Create the sub SMACH state machine
sm_con = smach.Concurrence(outcomes=['outcome4','preempted'],
default_outcome='outcome4',
outcome_map={'preempted':{ 'FOO':'outcome1','BAR':'preempted'},
'outcome4':{'BAR':'outcome2'}},
child_termination_cb = child_cb)
# Open the container
with sm_con:
# Add states to the container
smach.Concurrence.add('FOO', Foo())
smach.Concurrence.add('BAR', Bar())
smach.StateMachine.add('CON', sm_con,
transitions={'outcome4':'CON',
'preempted':'outcome6'})
# Create and start the introspection server
sis = smach_ros.IntrospectionServer('server_name', sm_top, '/SM_ROOT')
sis.start()
# sm_top.request_preempt()
set_preempt_handler(sm_top)
outcome = sm_top.execute()
# Wait for ctrl-c to stop the application
rospy.spin()
sis.stop()
if __name__ == '__main__':
main()
该例子跑出来的效果:
能够完成Foo对Bar的抢占,不抢占的话会反复在CON和Bar状态里循环,但是Foo要等Bar执行完毕才去抢占。
一些Tips
- 状态切换太快node会死掉
- 各个容器可以不定义结果,但建议最好要定义结果(这里的结果表示为在SMACH viewer里面的红色块),子容器与父容器通过该结果联系。子容器可以结果通向父容器或者重新回到自己状态的开始,父容器不能通向到子容器里面(待验证)
- 子容器与父容器的连线结果等于子容器的红色块结果
- 并发容器里面嵌套状态机时,如果里面的状态机里面状态阻塞为得到红色快结果,Ctrl C会报错:Concurrent state ‘xxx’ returned no outcome on termination.
- 抢占在并发容器里面实现,状态1要抢占状态2必须要等到状态2执行完???(无action的情况下)
- Monitor提供消息与状态的交互(monitor call back return true时状态输出invalid,并结束monitor状态,否则monitor状态一直阻塞)
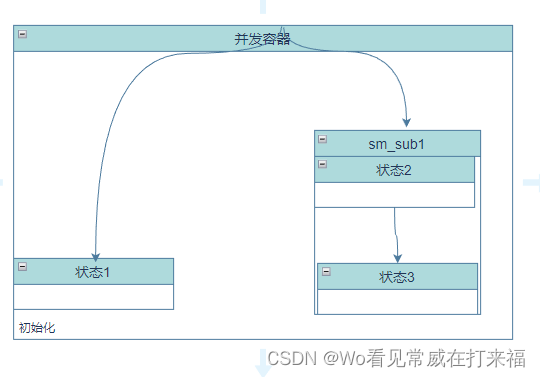
- 并发容器下只能并行执行多个单状态,如果需要在其中一个状态下再增加状态,需要打包。即对并发容器呈现出来只有多个单状态的并行。举个例子:
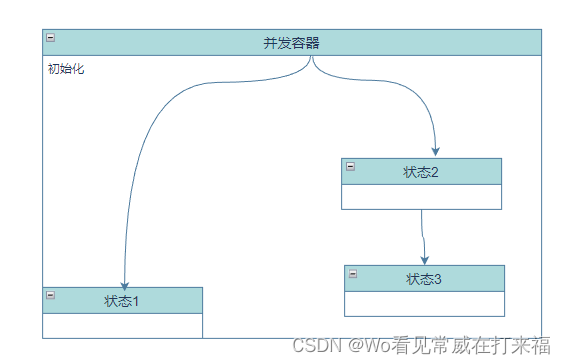
这样是不行的
必须把状态2和状态3打包成一个整体,打包在sm_sub1里面
- 待补充
SMACH缺点
- 基于Tips7带来的问题:并发容器里的子状态是嵌套的状态机时,如何定义抢占响应。对于各个状态我们可以在里面定义
def excute,状态机咋搞? - 基于Tips5似乎即便没有缺点1,该抢占也不是真正意义上的抢占???
- SMACH viewer node 经常动不动崩溃
个人的结论
层级数目超过教程例子的状态机就不建议参考使用SMACH,在确定要使用SMACH的情况下,建议在状态机设计时尽可能贴近SMACH教程的架构。

![[附源码]SSM计算机毕业设计疫情防控下高校教职工健康信息管理系统JAVA](https://img-blog.csdnimg.cn/0f8e7e4a232d44ccaf8b293b21908059.png)


![[2022世界杯] 小白也可以看懂的世界杯](https://img-blog.csdnimg.cn/ef9b10868f364c8283377dedeeb1719f.png)




![[附源码]计算机毕业设计springboot勤工俭学管理小程序](https://img-blog.csdnimg.cn/ff0680159ca14faeaad3e42ba1783df7.png)