向量的代数操作
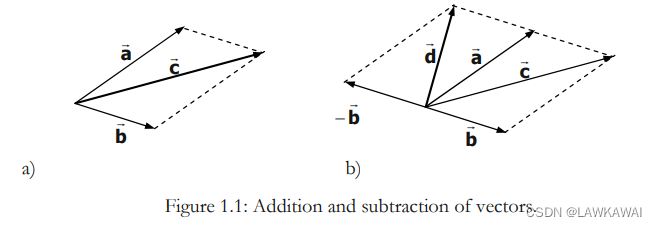
加法
a
⃗
\vec a
a,
b
⃗
\vec b
b为任意向量
c
⃗
=
a
⃗
+
b
⃗
=
b
⃗
+
a
⃗
\vec c = \vec a + \vec b = \vec b + \vec a
c=a+b=b+a
减法
d ⃗ = a ⃗ − + b ⃗ \vec d= \vec a-+ \vec b d=a−+b
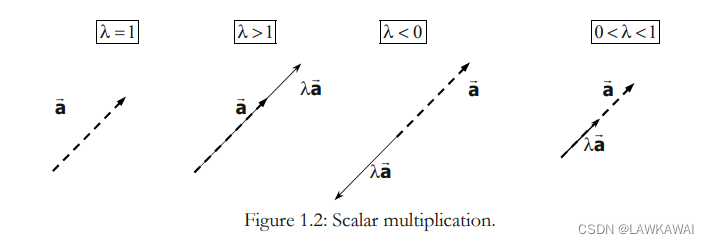
标量乘法
λ
a
⃗
\lambda \vec a
λa, 与
a
⃗
\vec a
a相同的方向,但长度和指向可能不同
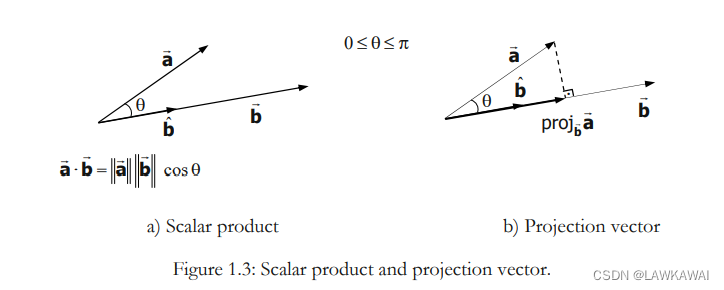
点积
γ
=
a
⃗
⋅
b
⃗
=
∣
∣
a
⃗
∣
∣
∣
∣
b
⃗
∣
∣
cos
θ
\gamma = \vec a \cdot \vec b = ||\vec a|| ||\vec b|| \cos \theta
γ=a⋅b=∣∣a∣∣∣∣b∣∣cosθ
如果
a
⃗
=
b
⃗
\vec a = \vec b
a=b,
a
⃗
⋅
a
⃗
=
∣
∣
a
⃗
∣
∣
∣
∣
a
⃗
∣
∣
cos
θ
=
∣
∣
a
⃗
∣
∣
2
\vec a \cdot \vec a = ||\vec a || || \vec a || \cos \theta = ||\vec a||^2
a⋅a=∣∣a∣∣∣∣a∣∣cosθ=∣∣a∣∣2
因此,
∣
∣
a
⃗
∣
∣
=
a
⃗
⋅
a
⃗
||\vec a|| = \sqrt{\vec a \cdot \vec a}
∣∣a∣∣=a⋅a
单位向量
a
^
\hat a
a^是
a
⃗
\vec a
a的单位向量,有相同方向,但长度为1
a
^
=
a
⃗
∣
∣
a
⃗
∣
∣
\hat a = \frac{\vec a}{||\vec a||}
a^=∣∣a∣∣a
因此,
∣
∣
a
^
∣
∣
=
1
||\hat a|| = 1
∣∣a^∣∣=1
零向量
0 ⃗ \vec 0 0
投影向量
向量
a
⃗
\vec a
a投影到
b
⃗
\vec b
b上:
p
r
o
j
b
⃗
→
a
⃗
=
∣
∣
p
r
o
j
b
⃗
a
⃗
∣
∣
b
^
\overrightarrow{proj_{\vec b}}\vec a = ||proj_{\vec b}\vec a||\hat b
projba=∣∣projba∣∣b^
∣
∣
p
r
o
j
b
⃗
a
⃗
∣
∣
||proj_{\vec b}\vec a||
∣∣projba∣∣可以通过点积得到:
∣
∣
p
r
o
j
b
⃗
a
⃗
∣
∣
=
a
⃗
⋅
b
^
||proj_{\vec b}\vec a|| = \vec a \cdot \hat b
∣∣projba∣∣=a⋅b^
所以,代入
b
^
=
b
⃗
∣
∣
b
⃗
∣
∣
\hat b = \frac{\vec b}{||\vec b||}
b^=∣∣b∣∣b
∣
∣
p
r
o
j
b
⃗
a
⃗
∣
∣
=
a
⃗
⋅
b
⃗
∣
∣
b
⃗
∣
∣
||proj_{\vec b}\vec a|| = \vec a \cdot \frac{\vec b}{||\vec b||}
∣∣projba∣∣=a⋅∣∣b∣∣b
上式代入到投影向量
p
r
o
j
b
⃗
→
a
⃗
=
a
⃗
⋅
b
⃗
∣
∣
b
⃗
∣
∣
b
^
=
a
⃗
⋅
b
⃗
∣
∣
b
⃗
∣
∣
b
⃗
∣
∣
b
⃗
∣
∣
=
a
⃗
⋅
b
⃗
∣
∣
b
⃗
∣
∣
2
b
⃗
\overrightarrow{proj_{\vec b}}\vec a = \vec a \cdot \frac{\vec b}{||\vec b||}\hat b = \vec a \cdot \frac{\vec b}{||\vec b||} \frac{\vec b}{||\vec b||} = \frac{\vec a \cdot \vec b}{||\vec b||^2} \vec b
projba=a⋅∣∣b∣∣bb^=a⋅∣∣b∣∣b∣∣b∣∣b=∣∣b∣∣2a⋅bb
两个向量之间的正交性
如果两个向量正交,点积为零
a
⃗
⋅
b
⃗
=
0
\vec a \cdot \vec b = 0
a⋅b=0
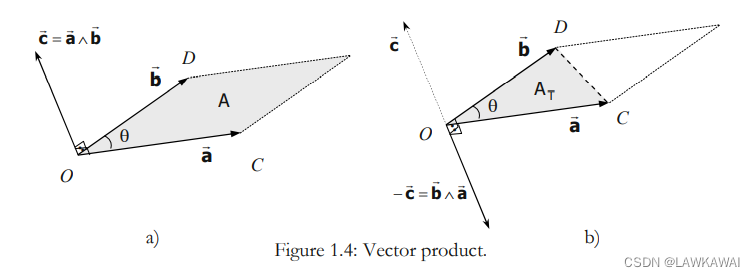
向量积(叉积)
两个向量 a ⃗ , b ⃗ \vec a, \vec b a,b的叉积得到一个向量 c ⃗ \vec c c,这个向量垂直于 a ⃗ , b ⃗ \vec a, \vec b a,b所在的平面
- 表示: c ⃗ = a ⃗ ∧ b ⃗ = b ⃗ ∧ c ⃗ \vec c = \vec a \wedge \vec b = \vec b \wedge \vec c c=a∧b=b∧c
- 如果 c ⃗ \vec c c垂于于 a ⃗ , b ⃗ \vec a, \vec b a,b: c ⃗ ⋅ a ⃗ = c ⃗ ⋅ b ⃗ = 0 \vec c \cdot \vec a = \vec c \cdot \vec b = 0 c⋅a=c⋅b=0
- c ⃗ \vec c c的大小: ∣ ∣ c ⃗ ∣ ∣ = ∣ ∣ a ⃗ ∣ ∣ ∣ ∣ b ⃗ ∣ ∣ sin θ ||\vec c|| = ||\vec a|| ||\vec b|| \sin \theta ∣∣c∣∣=∣∣a∣∣∣∣b∣∣sinθ
几何上
a
⃗
∧
b
⃗
\vec a \wedge \vec b
a∧b的大小 表示成
a
⃗
,
b
⃗
\vec a, \vec b
a,b构成的平行四边形的面积
A
=
∣
∣
a
⃗
∧
b
⃗
∣
∣
A = ||\vec a \wedge \vec b||
A=∣∣a∧b∣∣
标量三重积(混合积), Scalar Triple Product(Mixes Product)
三个任意向量
a
⃗
,
b
⃗
,
c
⃗
\vec a, \vec b, \vec c
a,b,c, 混合积:
a
⃗
⋅
(
b
⃗
∧
c
⃗
)
=
b
⃗
⋅
(
c
⃗
∧
a
⃗
)
=
c
⃗
⋅
(
a
⃗
∧
b
⃗
)
=
V
\vec a \cdot (\vec b \wedge \vec c) = \vec b \cdot (\vec c \wedge \vec a) = \vec c \cdot (\vec a \wedge \vec b) = V
a⋅(b∧c)=b⋅(c∧a)=c⋅(a∧b)=V
−
a
⃗
⋅
(
c
⃗
∧
b
⃗
)
=
−
b
⃗
⋅
(
a
⃗
∧
c
⃗
=
−
c
⃗
⋅
(
b
⃗
∧
a
⃗
)
=
V
-\vec a \cdot (\vec c \wedge \vec b) = - \vec b \cdot (\vec a \wedge \vec c = - \vec c \cdot (\vec b \wedge \vec a) = V
−a⋅(c∧b)=−b⋅(a∧c=−c⋅(b∧a)=V
几何上,混合积V表示三个向量
a
⃗
,
b
⃗
,
c
⃗
\vec a, \vec b, \vec c
a,b,c的平行六面体的体积
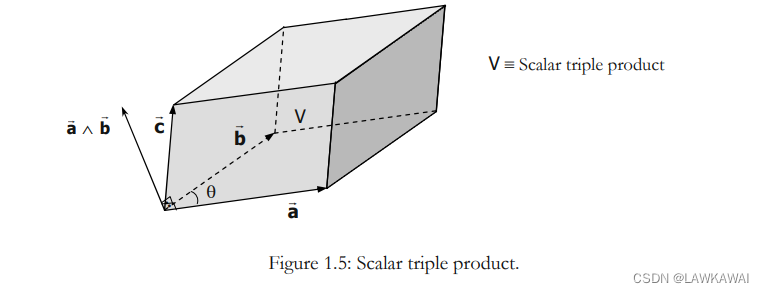
如果其中两个向量线性相关,则混合积为0:
a
⃗
⋅
(
b
⃗
∧
a
⃗
)
=
0
⃗
\vec a \cdot (\vec b \wedge \vec a) = \vec 0
a⋅(b∧a)=0
性质:
(
α
a
⃗
+
β
b
⃗
)
⋅
(
c
⃗
∧
d
⃗
)
=
α
a
⃗
⋅
(
c
⃗
∧
d
⃗
)
+
β
b
⃗
⋅
(
c
⃗
∧
d
⃗
)
(\alpha \vec a + \beta \vec b) \cdot (\vec c \wedge \vec d) = \alpha \vec a \cdot (\vec c \wedge \vec d) + \beta \vec b \cdot (\vec c \wedge \vec d)
(αa+βb)⋅(c∧d)=αa⋅(c∧d)+βb⋅(c∧d)
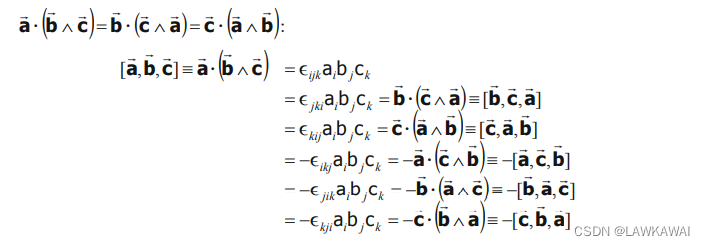
NOTE:
其他作者会写成:
[
a
⃗
,
b
⃗
,
c
⃗
]
=
a
⃗
⋅
(
b
⃗
∧
c
⃗
)
[\vec a, \vec b, \vec c] = \vec a \cdot (\vec b \wedge \vec c)
[a,b,c]=a⋅(b∧c)
[
b
⃗
,
c
⃗
,
a
⃗
]
=
b
⃗
⋅
(
c
⃗
∧
a
⃗
)
[\vec b, \vec c, \vec a] = \vec b \cdot (\vec c \wedge \vec a)
[b,c,a]=b⋅(c∧a)
[
c
⃗
,
a
⃗
,
b
⃗
]
=
c
⃗
⋅
(
a
⃗
∧
b
⃗
)
[\vec c, \vec a, \vec b] = \vec c \cdot (\vec a \wedge \vec b)
[c,a,b]=c⋅(a∧b)
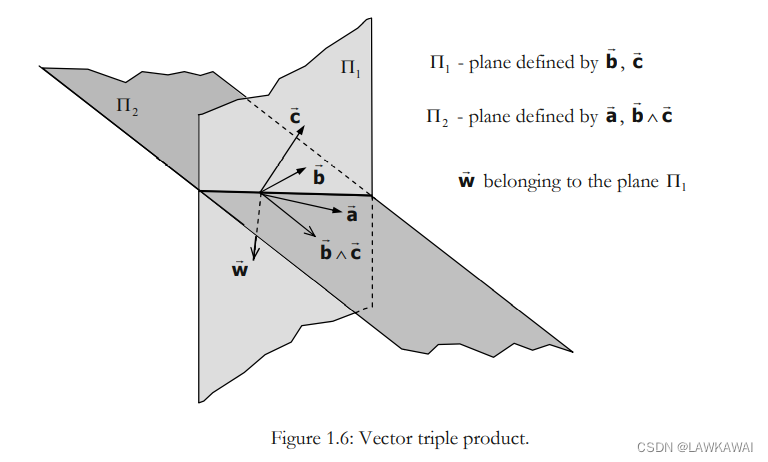
向量三重积
w
⃗
=
a
⃗
∧
(
b
⃗
∧
c
⃗
)
\vec w = \vec a \wedge (\vec b \wedge \vec c)
w=a∧(b∧c)
可以证明以下关系:
w
⃗
=
a
⃗
∧
(
b
⃗
∧
c
⃗
)
=
−
c
⃗
∧
(
a
⃗
∧
b
⃗
)
=
c
⃗
∧
(
b
⃗
∧
a
⃗
)
=
(
a
⃗
⋅
c
⃗
)
b
⃗
−
(
a
⃗
⋅
b
⃗
)
c
⃗
\vec w = \vec a \wedge (\vec b \wedge \vec c) = - \vec c \wedge (\vec a \wedge \vec b) = \vec c \wedge (\vec b \wedge \vec a) = (\vec a \cdot \vec c)\vec b - (\vec a \cdot \vec b)\vec c
w=a∧(b∧c)=−c∧(a∧b)=c∧(b∧a)=(a⋅c)b−(a⋅b)c
w
⃗
\vec w
w 位于由
b
⃗
,
c
⃗
\vec b, \vec c
b,c 构成的平面
Π
1
\Pi_1
Π1
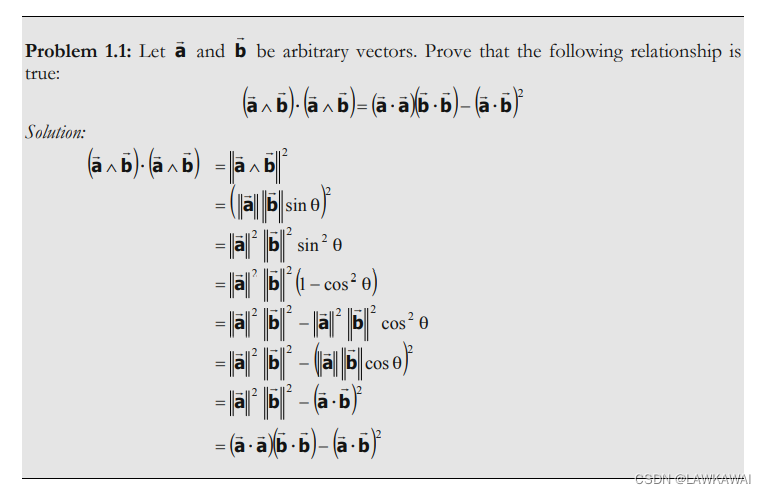
问题1.1 a ⃗ , b ⃗ \vec a, \vec b a,b是任意向量,证明以下关系为真: ( a ⃗ ∧ b ⃗ ) ⋅ ( a ⃗ ∧ b ⃗ ) = ( a ⃗ ⋅ b ⃗ ) ( a ⃗ ⋅ b ⃗ ) − ( a ⃗ ⋅ b ⃗ ) 2 (\vec a \wedge \vec b) \cdot (\vec a \wedge \vec b) = (\vec a \cdot \vec b) (\vec a \cdot \vec b) - (\vec a \cdot \vec b)^2 (a∧b)⋅(a∧b)=(a⋅b)(a⋅b)−(a⋅b)2
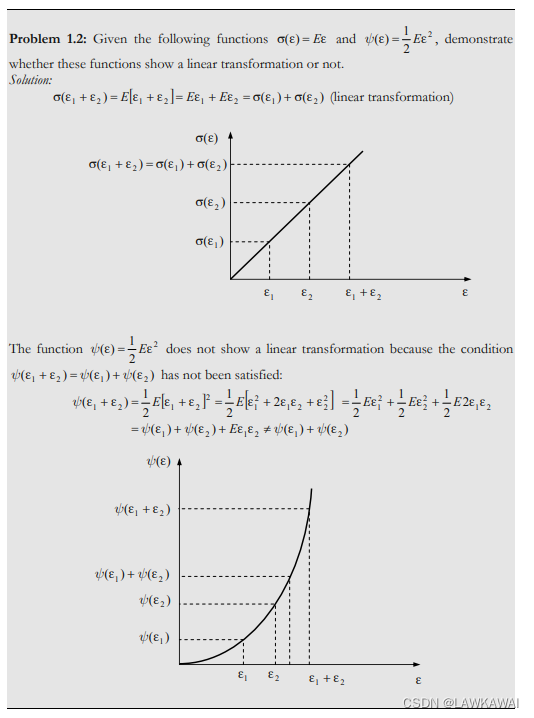
线性变换
u ⃗ , v ⃗ \vec u, \vec v u,v是任意向量, α \alpha α是标量,F是线性变换:
- F ( u ⃗ + v ⃗ ) = F ( u ⃗ ) + F ( v ⃗ ) F(\vec u + \vec v) = F(\vec u) + F(\vec v) F(u+v)=F(u)+F(v)
- F ( α u ⃗ ) = α F ( u ⃗ ) F(\alpha \vec u) = \alpha F(\vec u) F(αu)=αF(u)
问题1.2 给定函数 σ ( ϵ ) = E ϵ \sigma(\epsilon) = E \epsilon σ(ϵ)=Eϵ 和 ψ ( ϵ ) = 1 2 E ϵ 2 \psi(\epsilon) = \frac{1}{2}E\epsilon^2 ψ(ϵ)=21Eϵ2, 证明以上给定的函数是否是线性变换
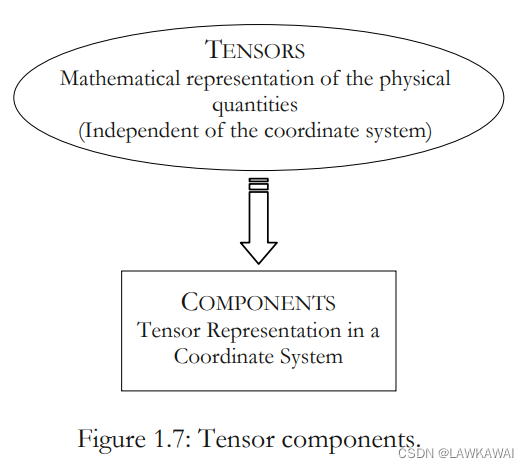
坐标系
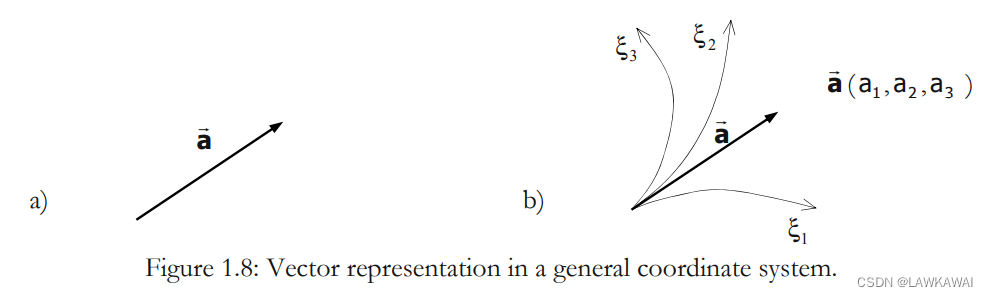
张量独立于坐标系,具有物理意义
a
⃗
\vec a
a是一阶张量,在一个通用的坐标系,
ξ
1
,
ξ
2
,
ξ
3
\xi_1, \xi_2, \xi_3
ξ1,ξ2,ξ3可以表示成
(
a
1
,
a
2
,
a
3
)
(a_1, a_2, a_3)
(a1,a2,a3)
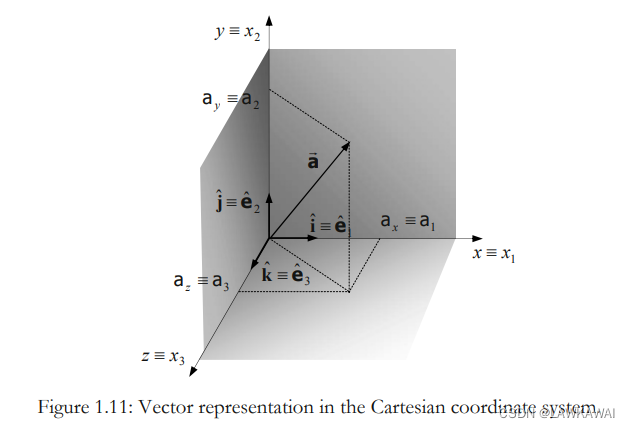
笛卡尔坐标系
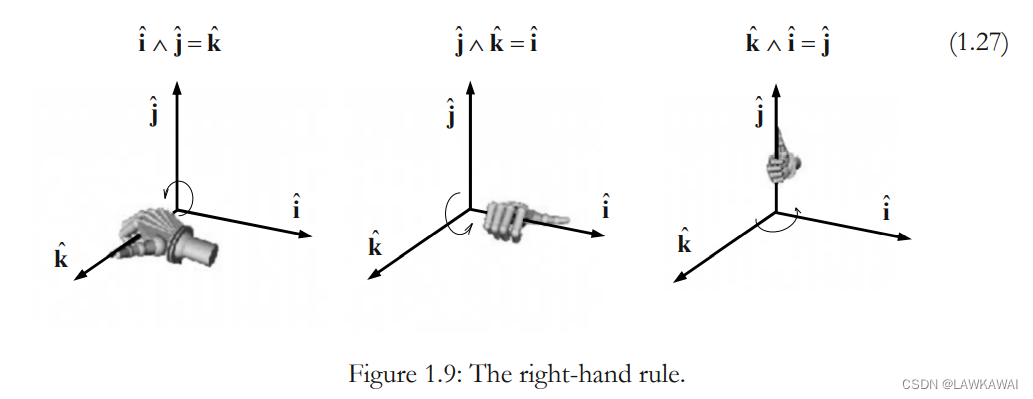
笛卡尔坐标系由单元向量 i ⃗ , j ⃗ , k ⃗ \vec i, \vec j, \vec k i,j,k定义, 正交基,有以下性质:
- 单位向量:
∣ ∣ i ⃗ ∣ ∣ = ∣ ∣ j ⃗ ∣ ∣ = ∣ ∣ k ⃗ ∣ ∣ = 1 ||\vec i|| = ||\vec j|| = ||\vec k|| = 1 ∣∣i∣∣=∣∣j∣∣=∣∣k∣∣=1 - 单位向量相互正交:
i ⃗ ⋅ j ⃗ = j ⃗ ⋅ k ⃗ = k ⃗ ⋅ i ⃗ = 0 \vec i \cdot \vec j = \vec j \cdot \vec k = \vec k \cdot \vec i = 0 i⋅j=j⋅k=k⋅i=0 - 向量之间的叉积满足:
i ⃗ ∧ j ⃗ = k ⃗ ; j ⃗ ∧ k ⃗ = i ⃗ ; k ⃗ ∧ i ⃗ = j ⃗ ; \vec i \wedge \vec j = \vec k; \vec j \wedge \vec k = \vec i; \vec k \wedge \vec i = \vec j; i∧j=k;j∧k=i;k∧i=j;
笛卡尔坐标系下的向量表示
a
⃗
\vec a
a在笛卡尔坐标系下的元素为
(
a
x
,
a
y
,
a
z
)
(a_x, a_y, a_z)
(ax,ay,az),并且笛卡儿基
(
i
⃗
,
j
⃗
,
k
⃗
)
(\vec i, \vec j, \vec k)
(i,j,k),表示为:
a
⃗
=
a
x
i
⃗
+
a
y
j
⃗
+
a
z
k
⃗
\vec a = a_x \vec i + a_y \vec j + a_z \vec k
a=axi+ayj+azk

在笛卡尔坐标系下描述向量操作:
-
点积:
a ⃗ ⋅ b ⃗ = ( a x i ^ + a y j ^ + a z k ^ ) ⋅ ( b x i ^ + b y j ^ + b z k ^ ) = a x b x = a y b y + a z b z \vec a \cdot \vec b = (a_x \hat i + a_y \hat j + a_z \hat k) \cdot (b_x \hat i + b_y \hat j + b_z \hat k) = a_x b _x = a_y b _y + a_z b_z a⋅b=(axi^+ayj^+azk^)⋅(bxi^+byj^+bzk^)=axbx=ayby+azbz
NOTE: 向量在y方向的投影可以用点积
a ⃗ ⋅ j ^ = ( a x i ^ + a y j ^ + a z k ^ ) ⋅ ( j ^ ) = a y \vec a \cdot \hat j = (a_x \hat i + a_y \hat j + a_z \hat k) \cdot (\hat j) = a_y a⋅j^=(axi^+ayj^+azk^)⋅(j^)=ay -
向量范数: ∣ ∣ a ⃗ ∣ ∣ = a x 2 + a y 2 + a z 2 ||\vec a|| = \sqrt{a_x^2 + a_y^2 + a_z^2} ∣∣a∣∣=ax2+ay2+az2
-
向量的单位向量: a ^ = a ⃗ ∣ ∣ a ⃗ ∣ ∣ = a x a x 2 + a y 2 + a z 2 i ^ + a y a x 2 + a y 2 + a z 2 j ^ + a z a x 2 + a y 2 + a z 2 k ^ \hat a = \frac{\vec a}{||\vec a||} = \frac{a_x}{\sqrt{a_x^2 + a_y^2 + a_z^2}}\hat i + \frac{a_y}{\sqrt{a_x^2 + a_y^2 + a_z^2}}\hat j + \frac{a_z}{\sqrt{a_x^2 + a_y^2 + a_z^2}}\hat k a^=∣∣a∣∣a=ax2+ay2+az2axi^+ax2+ay2+az2ayj^+ax2+ay2+az2azk^
-
零向量: 0 ⃗ = 0 i ^ + 0 j ^ + 0 k ^ \vec 0 = 0 \hat i + 0\hat j +0\hat k 0=0i^+0j^+0k^
-
加法:
a ⃗ + b ⃗ = ( a x i ^ + a y j ^ + a z k ^ ) + ( b x i ^ + b y j ^ + b z k ^ ) = ( a x + b x ) i ^ + ( a y + b y ) j ^ + ( a z + b z ) k ^ \vec a + \vec b = (a_x \hat i + a_y \hat j + a_z \hat k) + (b_x \hat i + b_y \hat j + b_z \hat k) = (a_x + b_x) \hat i + (a_y + b_y) \hat j + (a_z + b_z) \hat k a+b=(axi^+ayj^+azk^)+(bxi^+byj^+bzk^)=(ax+bx)i^+(ay+by)j^+(az+bz)k^ -
减法:
a ⃗ − b ⃗ = ( a x i ^ + a y j ^ + a z k ^ ) − ( b x i ^ + b y j ^ + b z k ^ ) = ( a x − b x ) i ^ + ( a y − b y ) j ^ + ( a z − b z ) k ^ \vec a - \vec b = (a_x \hat i + a_y \hat j + a_z \hat k) - (b_x \hat i + b_y \hat j + b_z \hat k) = (a_x - b_x) \hat i + (a_y - b_y) \hat j + (a_z - b_z) \hat k a−b=(axi^+ayj^+azk^)−(bxi^+byj^+bzk^)=(ax−bx)i^+(ay−by)j^+(az−bz)k^ -
标量乘积: λ a ⃗ = λ a x i ^ + λ a y j ^ + λ a z k ^ \lambda \vec a = \lambda a_x \hat i + \lambda a_y \hat j + \lambda a_z\hat k λa=λaxi^+λayj^+λazk^
-
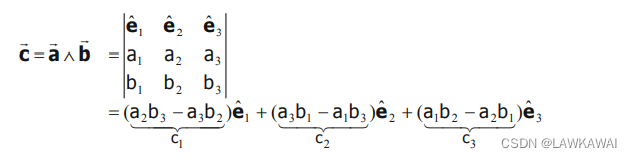
向量积:
c ⃗ = a ⃗ ∧ b ⃗ = ∣ i ^ j ^ k ^ a x a y a z b x b y b z ∣ = ∣ a y a z b y b z ∣ i ^ − ∣ a x a z b x b z ∣ j ^ + ∣ a x a y b x b y ∣ k ^ = ( a y b z − a z b y ) i ^ + ( a x b z − a z b x ) j ^ + ( a x b y − a y b x ) k ^ \vec c = \vec a \wedge \vec b = \begin{vmatrix} \hat i& \hat j & \hat k\\ a_x &a_y & a_z\\ b_x &b_y & b_z \end{vmatrix} = \begin{vmatrix} a_y & a_z\\ b_y & b_z \end{vmatrix} \hat i- \begin{vmatrix} a_x & a_z\\ b_x & b_z \end{vmatrix} \hat j + \begin{vmatrix} a_x & a_y\\ b_x & b_y \end{vmatrix} \hat k \\ = (a_yb_z - a_z b_y) \hat i + (a_xb_z - a_z b_x) \hat j + (a_xb_y - a_y b_x) \hat k c=a∧b= i^axbxj^aybyk^azbz = aybyazbz i^− axbxazbz j^+ axbxayby k^=(aybz−azby)i^+(axbz−azbx)j^+(axby−aybx)k^ -
标量三重积:
V ( a ⃗ , b ⃗ , c ⃗ ) = a ⃗ ⋅ ( b ⃗ ∧ c ⃗ ) = b ⃗ ⋅ ( c ⃗ ∧ a ⃗ ) = c ⃗ ⋅ ( a ⃗ ∧ b ⃗ ) = ∣ a x a y a z b x b y b z c x c y c z ∣ = a x ∣ b y b z c y c z ∣ − a y ∣ b x b z c x c z ∣ + a z ∣ b x b y c x c y ∣ = a x ( b y c z − b z c y ) + a y ( b x c z − b z c x ) + a z ( b x c y − b y c x ) V(\vec a, \vec b, \vec c) = \vec a \cdot (\vec b \wedge \vec c) = \vec b \cdot (\vec c \wedge \vec a) = \vec c \cdot (\vec a \wedge \vec b) = \begin{vmatrix} a_x &a_y & a_z\\ b_x &b_y & b_z\\ c_x & c_y & c_z \end{vmatrix} \\ = a_x \begin{vmatrix} b_y & b_z\\ c_y & c_z \end{vmatrix} - a_y \begin{vmatrix} b_x & b_z\\ c_x & c_z \end{vmatrix} + a_z \begin{vmatrix} b_x & b_y\\ c_x & c_y \end{vmatrix} \\ =a_x (b_yc_z - b_z c_y) +a_y(b_xc_z - b_z c_x) +a_z (b_xc_y - b_y c_x) V(a,b,c)=a⋅(b∧c)=b⋅(c∧a)=c⋅(a∧b)= axbxcxaybycyazbzcz =ax bycybzcz −ay bxcxbzcz +az bxcxbycy =ax(bycz−bzcy)+ay(bxcz−bzcx)+az(bxcy−bycx) -
向量三重积:
a ⃗ ∧ ( b ⃗ ∧ c ⃗ ) = ( a ⃗ ⋅ c ⃗ ) b ⃗ − ( a ⃗ ⋅ b ⃗ ) c ⃗ = ( λ 1 b x − λ 2 c x ) i ^ + ( λ 1 b y − λ 2 c y ) j ^ + ( λ 1 b z − λ 2 c z ) k ^ \vec a \wedge (\vec b \wedge \vec c) = (\vec a \cdot \vec c)\vec b - (\vec a \cdot \vec b)\vec c = (\lambda_1 b_x - \lambda_2 c_x)\hat i + (\lambda_1 b_y - \lambda_2 c_y)\hat j + (\lambda_1 b_z - \lambda_2 c_z)\hat k a∧(b∧c)=(a⋅c)b−(a⋅b)c=(λ1bx−λ2cx)i^+(λ1by−λ2cy)j^+(λ1bz−λ2cz)k^
其中,
λ 1 = a ⃗ ⋅ c ⃗ = a x c x + a y c y + a z c z \lambda_1 = \vec a \cdot \vec c = a_x c_x + a_y c_y + a_z c_z λ1=a⋅c=axcx+aycy+azcz
λ 2 = a ⃗ ⋅ b ⃗ = a x b x + a y b y + a z b z \lambda_2 = \vec a \cdot \vec b = a_x b_x + a_y b_y + a_z b_z λ2=a⋅b=axbx+ayby+azbz
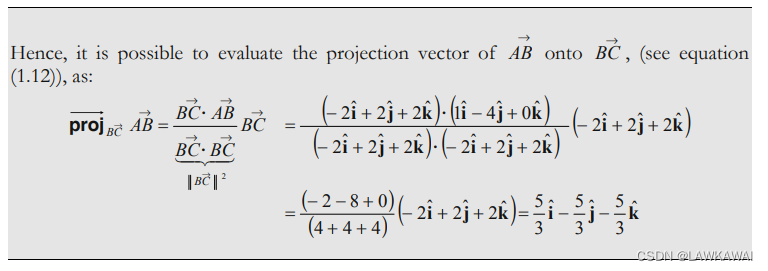
问题1.3 A(1,3,1), B(2, -1, 1), C(0, 1,3), D(1, 2, 4)

爱因斯坦求和约定(爱因斯坦符号)
a ⃗ = a 1 e ^ 1 + a 2 e ^ 2 + a 3 e ^ 3 = ∑ i = 1 3 a i e ^ i \vec a = a_1 \hat e_1 + a_2 \hat e_2 + a_3 \hat e_3 = \sum_{i=1}^3 a_i \hat e_i a=a1e^1+a2e^2+a3e^3=∑i=13aie^i
求和约定:
a
⃗
=
a
i
e
^
i
\boxed{\vec a = a_i \hat e_i}
a=aie^i
指标符号
( a ⃗ ) i = a i = [ a 1 a 2 a 3 ] (\vec a)_i = a_i = \begin{bmatrix} a_1\\ a_2 \\ a_3 \end{bmatrix} (a)i=ai= a1a2a3
单元向量元素
a
^
=
a
⃗
∣
∣
a
⃗
∣
∣
\hat a = \frac{\vec a}{||\vec a||}
a^=∣∣a∣∣a
元素为:
a
^
i
=
a
i
a
1
2
+
a
2
2
+
a
3
2
=
a
i
a
j
a
j
\hat a_i = \frac{a_i}{\sqrt{a_1^2 + a_2^2 + a_3^2}} = \frac{a_i}{\sqrt{a_ja_j}}
a^i=a12+a22+a32ai=ajajai
自由指标:在整个表达式中只出现一次的下标(i)
哑指标: 在整个表达式中出现两次的下标(j)
表达式中一个下标只能出现一次或两次,如果出现三次及以上,表示严重的错误
点积
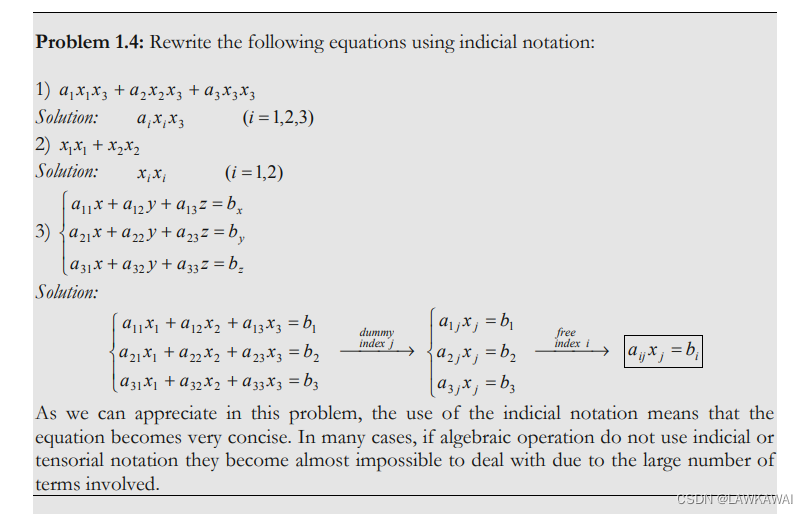
γ = a ⃗ ⋅ b ⃗ = a i b i \gamma = \vec a \cdot \vec b = a_i b_i γ=a⋅b=aibi
问题1.4 用指标符号重写:
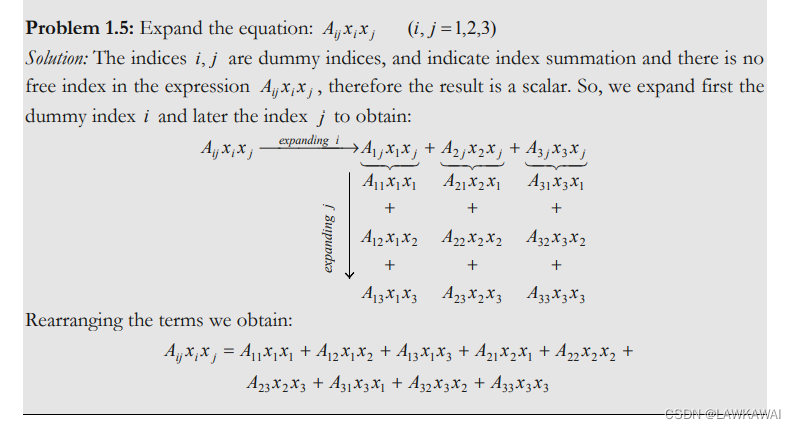
问题1.5 扩展: A i j x i x j A_{ij}x_ix_j Aijxixj
其他算子
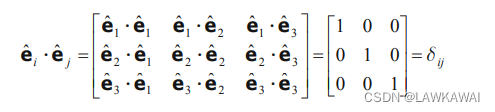
Kronecker Delta δ i j \delta_{ij} δij
δ i j = { 1 i f f i = j 0 i f f i ≠ j \delta_{ij} = \begin{cases} 1 & iff & i = j \\ 0 & iff & i \neq j \end{cases} δij={10iffiffi=ji=j
e
^
i
⋅
e
^
j
\hat e_i \cdot \hat e_j
e^i⋅e^j有同样的性质:
δ
i
j
\delta_{ij}
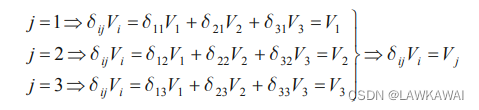
δij 的有趣性质:
δ
i
j
V
i
=
δ
1
j
V
1
+
δ
2
j
V
2
+
δ
3
j
V
3
\delta_{ij} V_i = \delta_{1j}V_1 + \delta_{2j}V_2 + \delta_{3j}V_3
δijVi=δ1jV1+δ2jV2+δ3jV3
δ
i
j
V
i
=
V
j
\delta_{ij}V_i = V_j
δijVi=Vj, Kronecker Delta 也被称作替换算子
其他的例子:
δ
i
j
A
i
k
=
A
j
k
\delta_{ij}A_{ik} = A_{jk}
δijAik=Ajk
δ
i
j
δ
j
i
=
δ
i
i
=
δ
11
+
δ
22
+
δ
33
\delta_{ij}\delta_{ji} = \delta_{ii} = \delta_{11} +\delta_{22} +\delta_{33}
δijδji=δii=δ11+δ22+δ33
δ
j
i
a
j
i
=
a
i
i
\delta_{ji}a_{ji} = a_{ii}
δjiaji=aii
向量在坐标系中的元素:
a
⃗
⋅
e
^
i
=
a
p
e
^
p
⋅
e
^
i
=
a
p
δ
p
i
=
a
i
\vec a \cdot \hat e_i = a_p \hat e_p \cdot \hat e_i = a_p \delta_{pi} = a_i
a⋅e^i=ape^p⋅e^i=apδpi=ai
所以利用以上式子,可以将向量表示成:
a
⃗
=
a
i
e
^
i
=
(
a
⃗
⋅
e
^
i
)
e
^
i
\vec a = a_i \hat e_i = (\vec a \cdot \hat e_i) \hat e_i
a=aie^i=(a⋅e^i)e^i
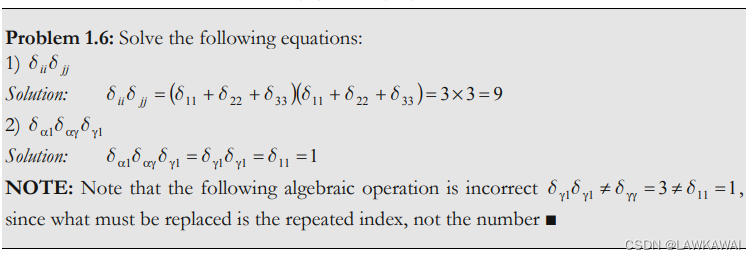
问题1.6 求以下表达式
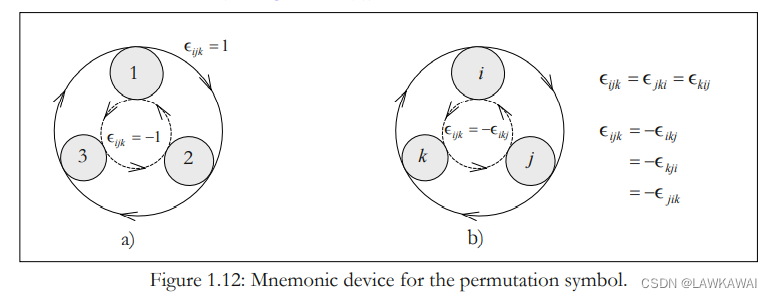
置换符号
Levi-Civita symbol :
ϵ
i
j
k
\epsilon_{ijk}
ϵijk
ϵ
i
j
k
=
{
1
i
f
i
(
i
,
j
,
k
)
=
(
1
,
2
,
3
)
,
(
2
,
3
,
1
)
,
(
3
,
1
,
2
)
−
1
i
f
i
(
i
,
j
,
k
)
=
(
1
,
3
,
2
)
,
(
3
,
2
,
1
)
,
(
2
,
1
,
3
)
0
o
f
i
=
j
,
o
r
j
=
k
,
o
r
i
=
k
\epsilon_{ijk} = \begin{cases} 1 & if & i(i,j,k) = {(1,2,3), (2, 3, 1), (3, 1, 2)} \\ -1 & if & i(i,j,k) = {(1,3,2), (3, 2, 1), (2, 1, 3)} \\ 0 & of & i=j , or j =k , or i=k \end{cases}
ϵijk=⎩
⎨
⎧1−10ififofi(i,j,k)=(1,2,3),(2,3,1),(3,1,2)i(i,j,k)=(1,3,2),(3,2,1),(2,1,3)i=j,orj=k,ori=k
下标表示:
ϵ
i
j
k
=
1
2
(
i
−
j
)
(
j
−
k
)
(
k
−
i
)
\epsilon_{ijk} = \frac{1}{2}(i-j)(j-k)(k-i)
ϵijk=21(i−j)(j−k)(k−i)
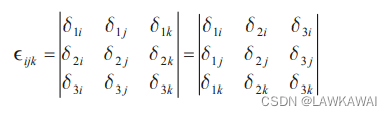
根据定义可知:

利用Kronecker Delta 的性质,可以说明:
ϵ
i
j
k
=
ϵ
l
m
n
δ
l
i
δ
m
j
δ
k
n
\epsilon_{ijk} = \epsilon_{lmn}\delta_{li} \delta_{mj} \delta_{kn}
ϵijk=ϵlmnδliδmjδkn
可以表示成行列式:
ϵ
i
j
k
ϵ
p
q
r
\epsilon_{ijk} \epsilon_{pqr}
ϵijkϵpqr表示成:
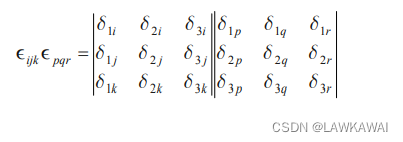
由行列式的性质:
det
(
A
B
)
=
det
(
A
)
det
(
B
)
\det(AB) = \det(A) \det(B)
det(AB)=det(A)det(B),可得:

当r = k, 有:
ϵ
i
j
k
ϵ
p
q
k
=
δ
i
p
δ
j
q
−
δ
i
q
δ
j
p
,
i
,
j
,
k
,
p
,
q
=
1
,
2
,
3
\boxed{\epsilon_{ijk} \epsilon_{pqk} = \delta_{ip}\delta_{jq} - \delta_{iq} \delta_{jp}, \quad i,j,k,p,q = 1, 2, 3}
ϵijkϵpqk=δipδjq−δiqδjp,i,j,k,p,q=1,2,3
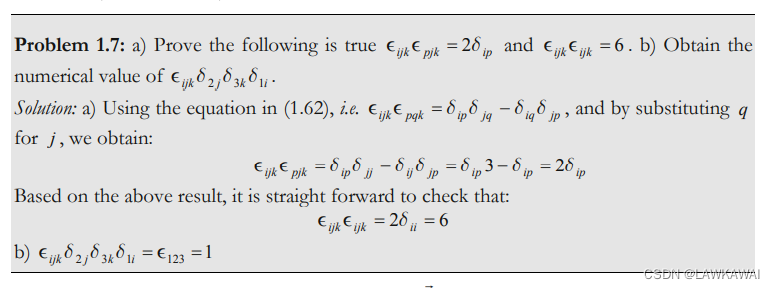
问题1.7 证明:a) ϵ i j k ϵ p j k = 2 δ i p \epsilon_{ijk} \epsilon_{pjk} = 2\delta_{ip} ϵijkϵpjk=2δip, ϵ i j k ϵ i j k = 6 \epsilon_{ijk}\epsilon_{ijk}= 6 ϵijkϵijk=6; b)计算得到 ϵ i j k δ 2 j δ 3 k δ 1 i \epsilon_{ijk}\delta_{2j}\delta_{3k}\delta_{1i} ϵijkδ2jδ3kδ1i的值
向量叉积:
利用置换符号
ϵ
i
j
k
\epsilon_{ijk}
ϵijk的定义:
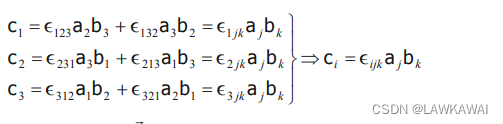
向量的叉积可以通过置换符号表示:
a
⃗
∧
b
⃗
=
ϵ
i
j
k
a
j
b
k
e
^
i
a
j
e
^
j
∧
b
k
e
^
k
=
a
j
b
k
ϵ
i
j
k
e
^
i
a
j
b
k
(
e
^
j
∧
e
^
k
)
=
a
j
b
k
ϵ
i
j
k
e
^
i
=
a
j
b
k
ϵ
j
k
i
e
^
i
\vec a \wedge \vec b = \epsilon_{ijk} a_j b_k \hat e_i \\ a_j \hat e_j \wedge b_k \hat e_k = a_j b_k \epsilon_{ijk}\hat e_i \\ a_j b_k (\hat e_j \wedge \hat e_k) = a_j b_k \epsilon_{ijk}\hat e_i = a_j b_k \epsilon_{jki}\hat e_i
a∧b=ϵijkajbke^iaje^j∧bke^k=ajbkϵijke^iajbk(e^j∧e^k)=ajbkϵijke^i=ajbkϵjkie^i
因此,有:
(
e
^
i
∧
e
^
j
)
=
ϵ
i
j
k
e
^
i
\boxed{(\hat e_i \wedge \hat e_j) = \epsilon_{ijk}\hat e_i}
(e^i∧e^j)=ϵijke^i
置换符号可以通过标量三重积与正交基联系起来:
(
e
^
i
∧
e
^
j
)
⋅
e
^
k
=
ϵ
i
j
m
e
^
m
⋅
e
^
k
=
ϵ
i
j
m
δ
m
k
=
ϵ
i
j
k
(\hat e_i \wedge \hat e_j) \cdot \hat e_k = \epsilon_{ijm}\hat e_m \cdot \hat e_k = \epsilon_{ijm}\delta_{mk} = \epsilon_{ijk}
(e^i∧e^j)⋅e^k=ϵijme^m⋅e^k=ϵijmδmk=ϵijk
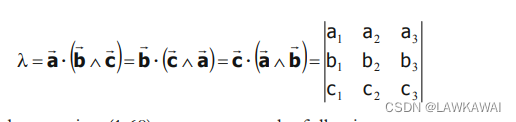
标量三重积:
λ
=
a
⃗
⋅
(
b
⃗
∧
c
⃗
)
=
a
i
e
^
i
⋅
(
b
j
e
^
j
∧
c
k
e
^
k
)
=
a
i
b
j
c
k
e
^
i
⋅
(
e
^
j
∧
e
^
k
)
=
a
i
b
j
c
k
e
^
i
⋅
ϵ
i
j
k
e
^
i
=
ϵ
i
j
k
a
i
b
j
c
k
\lambda = \vec a \cdot (\vec b \wedge \vec c) = a_i\hat e_i \cdot(b_j\hat e_j \wedge c_k \hat e_k) = a_i b_j c_k \hat e_i \cdot(\hat e_j \wedge \hat e_k) \\ =a_i b_j c_k \hat e_i \cdot \epsilon_{ijk}\hat e_i = \epsilon_{ijk}a_i b_j c_k
λ=a⋅(b∧c)=aie^i⋅(bje^j∧cke^k)=aibjcke^i⋅(e^j∧e^k)=aibjcke^i⋅ϵijke^i=ϵijkaibjck
所以,有:
λ
=
a
⃗
⋅
(
b
⃗
∧
c
⃗
)
=
ϵ
i
j
k
a
i
b
j
c
k
,
i
,
j
,
k
=
1
,
2
,
3
\boxed{\lambda = \vec a \cdot (\vec b \wedge \vec c) = \epsilon_{ijk}a_ib_jc_k, \quad i,j,k = 1,2,3}
λ=a⋅(b∧c)=ϵijkaibjck,i,j,k=1,2,3
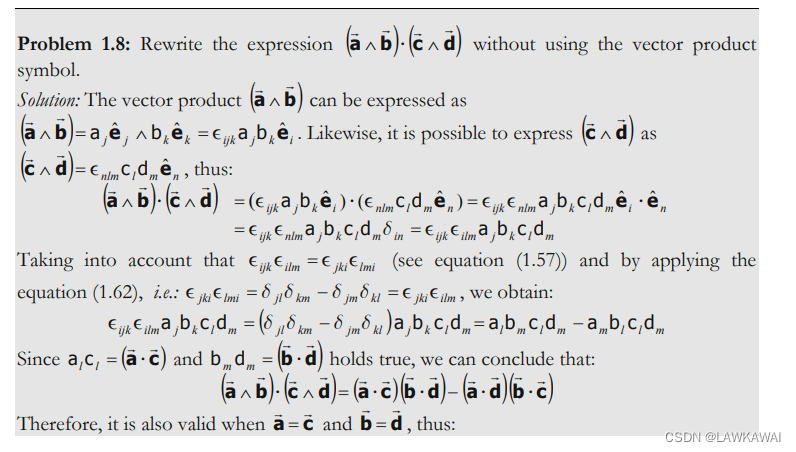
问题1.9 不使用向量叉积符号重写表达式 ( a ⃗ ∧ b ⃗ ) ⋅ ( c ⃗ ∧ d ⃗ ) (\vec a \wedge \vec b) \cdot (\vec c \wedge \vec d) (a∧b)⋅(c∧d)

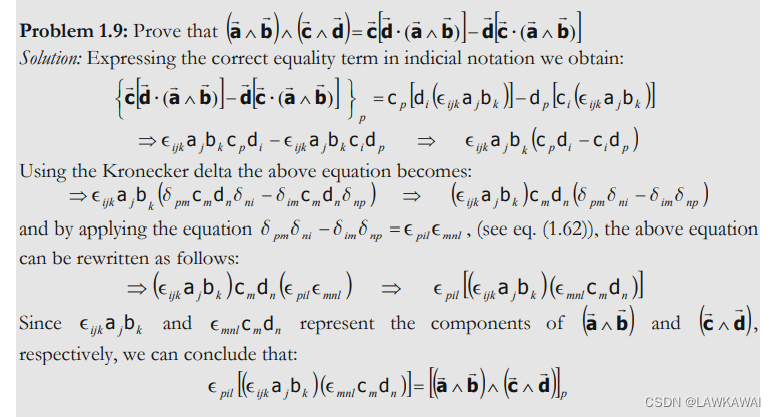
问题1.9 证明: ( a ⃗ ∧ b ⃗ ) ∧ ( c ⃗ ∧ d ⃗ ) = c [ d ⃗ ⋅ ( a ⃗ ∧ b ⃗ ) ] − d ⃗ [ c ⃗ ⋅ ( a ⃗ ∧ b ⃗ ) ] (\vec a \wedge \vec b) \wedge (\vec c \wedge \vec d) = c[\vec d \cdot (\vec a \wedge \vec b)] - \vec d[\vec c \cdot (\vec a \wedge \vec b)] (a∧b)∧(c∧d)=c[d⋅(a∧b)]−d[c⋅(a∧b)]
问题1.10 a ⃗ , b ⃗ , c ⃗ \vec a, \vec b, \vec c a,b,c为线性相关向量,证明:向量 v ⃗ = α a ⃗ + β b ⃗ + γ c ⃗ ≠ 0 ⃗ \vec v = \alpha \vec a + \beta \vec b + \gamma \vec c \neq \vec 0 v=αa+βb+γc=0

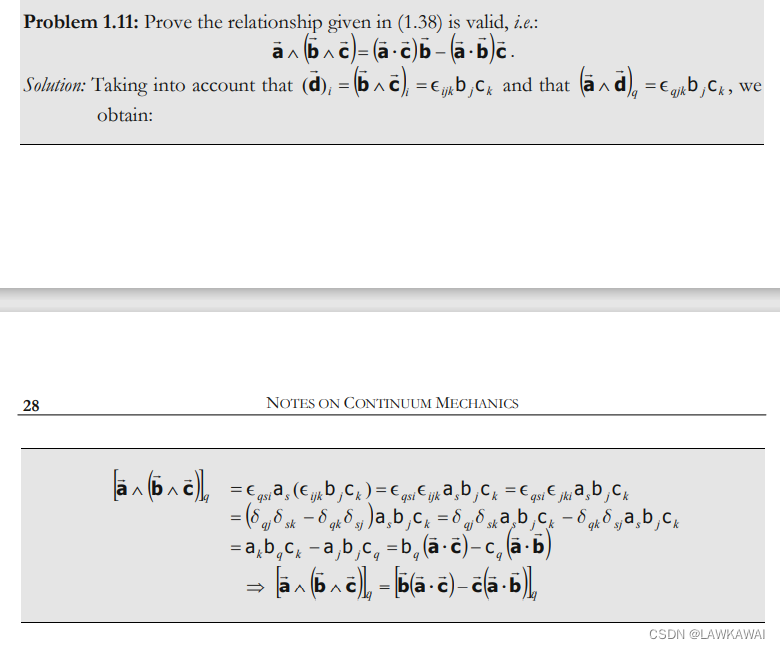
问题1.11 证明: a ⃗ ∧ ( b ⃗ ∧ c ⃗ ) = ( a ⃗ ⋅ c ⃗ ) b ⃗ − ( a ⃗ ⋅ b ⃗ ) c ⃗ \vec a \wedge (\vec b \wedge \vec c) = (\vec a \cdot \vec c) \vec b - (\vec a \cdot \vec b) \vec c a∧(b∧c)=(a⋅c)b−(a⋅b)c
教材:
Eduardo W.V. Chaves, Notes On Continuum Mechanics