简单记忆clarke和park坐标变换
简介
想用简单的办法把这些变换矩阵写出来,需要的时候可以使用,不用再去翻书(当然完全记住还是更快一些)。只是自己用来记忆这些变换的方法。
具体可以参考:手撕系列(2):Clark变换与Park变换 - 知乎 (zhihu.com)
和这个视频:The Clarke and Park transformations (Episode 8)
还有这个(有空再看):C. J. O’Rourke, M. M. Qasim, M. R. Overlin, and J. L. Kirtley, “A Geometric Interpretation of Reference Frames and Transformations: dq0, Clarke, and Park,” IEEE Trans. Energy Convers., vol. 34, no. 4, pp. 2070–2083, Dec. 2019, doi: 10.1109/TEC.2019.2941175.
Clarke变换
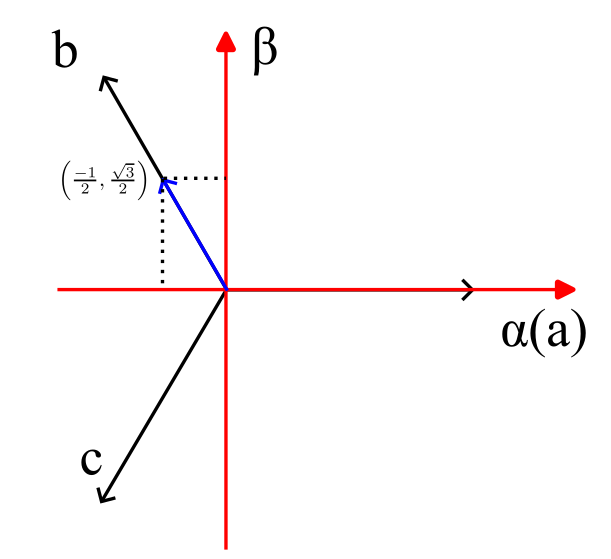
只看等幅值的Clarke变换。想一想abc三轴的方向上,单位长度的矢量,在αβ系中的坐标:
a : ( 1 , 0 ) b : ( − 1 2 , 3 2 ) c : ( − 1 2 , − 3 2 ) \begin{align*} &a:(1,0) \\ &b:\left(\frac{-1}{2},\frac{\sqrt{3}}{2}\right) \\ &c:\left(\frac{-1}{2},-\frac{\sqrt{3}}{2}\right) \end{align*} a:(1,0)b:(2−1,23)c:(2−1,−23)
把abc三个矢量的α坐标(实部)写第一行,β坐标(虚部)写第二行,乘上系数2/3,就是Clarke变换。
[
x
α
x
β
]
=
T
3
/
2
[
x
a
x
b
x
c
]
=
2
3
[
1
−
1
2
−
1
2
0
3
2
−
3
2
]
[
x
a
x
b
x
c
]
\left[ \begin{matrix} x_\alpha \\ x_\beta \end{matrix} \right] =T_{3/2}\left[ \begin{matrix} x_a \\ x_b \\ x_c \end{matrix} \right]= \frac{2}{3} \left[ \begin{matrix} 1 & -\frac{1}{2} & -\frac{1}{2}\\ 0 & \frac{\sqrt{3}}{2} & -\frac{\sqrt{3}}{2} \end{matrix} \right] \left[ \begin{matrix} x_a \\ x_b \\x_c \end{matrix} \right]
[xαxβ]=T3/2
xaxbxc
=32[10−2123−21−23]
xaxbxc
去掉系数2/3,做个转置,就是Clarke反变换。因为正变换时采用了等幅值,乘以了系数2/3,所以反变换就不需要再加系数了——我大致是这样理解的。
T 2 / 3 = [ 1 0 − 1 2 3 2 − 1 2 − 3 2 ] T_{2/3}= \left[\begin{matrix} 1 & 0 \\ -\frac{1}{2} & \frac{\sqrt{3}}{2} \\ -\frac{1}{2} & -\frac{\sqrt{3}}{2} \end{matrix}\right] T2/3= 1−21−21023−23
Park变换
关于Park变换,一直记得主对角线上是cos,副对角线是是sin,总是记不清sin的负号在哪里。
矢量在逆时针旋转,角度增大,而经过park变换后成为一个直流量,所以,park变换的作用相当于对矢量做了顺时针的旋转,也就是
e
−
j
θ
=
c
o
s
θ
−
j
s
i
n
θ
e^{-j \theta}=cos \theta-jsin \theta
e−jθ=cosθ−jsinθ。把实部写第一行,虚部写第二行,得到了半个park变换矩阵,就知道了负号是在第一列的sin。。。
Park反变换,
e
j
θ
=
c
o
s
θ
+
j
s
i
n
θ
e^{j \theta}=cos \theta+jsin \theta
ejθ=cosθ+jsinθ,同理。
T r ( − θ r ) = [ c o s θ r s i n θ r − s i n θ r c o s θ r ] , ( Park ) T r ( θ r ) = [ c o s θ r − s i n θ r s i n θ r c o s θ r ] , ( inverse Park ) \begin{align*} T_{r}(-\theta_r) &= \left[\begin{matrix} cos\theta_r & sin\theta_r \\ -sin\theta_r & cos\theta_r \\ \end{matrix} \right], \;(\text{Park}) \\ T_{r}(\theta_r) &= \left[\begin{matrix} cos\theta_r & -sin\theta_r \\ sin\theta_r & cos\theta_r \end{matrix} \right], \;(\text{inverse\,Park}) \\ \end{align*} Tr(−θr)Tr(θr)=[cosθr−sinθrsinθrcosθr],(Park)=[cosθrsinθr−sinθrcosθr],(inversePark)
具体也可以参考:手撕系列(2):Clark变换与Park变换 - 知乎 (zhihu.com)
附1
在αβ系中,
x
⃗
=
k
α
e
⃗
α
+
k
β
e
⃗
β
\vec{x}=k_{\alpha}\vec{e}_{\alpha}+k_{\beta}\vec{e}_{\beta}
x=kαeα+kβeβ
在abc系中,同一个物理量,
x
⃗
=
k
a
e
⃗
a
+
k
b
e
⃗
b
+
k
c
e
⃗
c
\vec{x}=k_{a}\vec{e}_{a}+k_{b}\vec{e}_{b}+k_{c}\vec{e}_{c}
x=kaea+kbeb+kcec
其中
e
⃗
x
\vec{e}_{x}
ex为坐标轴方向上的单位向量。
为了在两个坐标系中切换,需要找到单位向量之间的对应关系。
比如abc系->αβ系:
e
⃗
b
=
−
1
2
e
⃗
α
+
3
2
e
⃗
β
\vec{e}_{b}=-\frac{1}{2}\vec{e}_{\alpha}+ \frac{\sqrt{3}}{2}\vec{e}_{\beta}
eb=−21eα+23eβ
但是反过来,αβ系->abc系,其实挺难理解的,因为表示方法不唯一。。暂时还没懂。
比如
e
⃗
α
=
e
⃗
a
=
−
e
⃗
b
−
e
⃗
c
\vec{e}_{\alpha}=\vec{e}_{a}=-\vec{e}_{b}-\vec{e}_{c}
eα=ea=−eb−ec
而系数2/3只是为了使变换后矢量的模和三相物理量的幅值相等。
附2
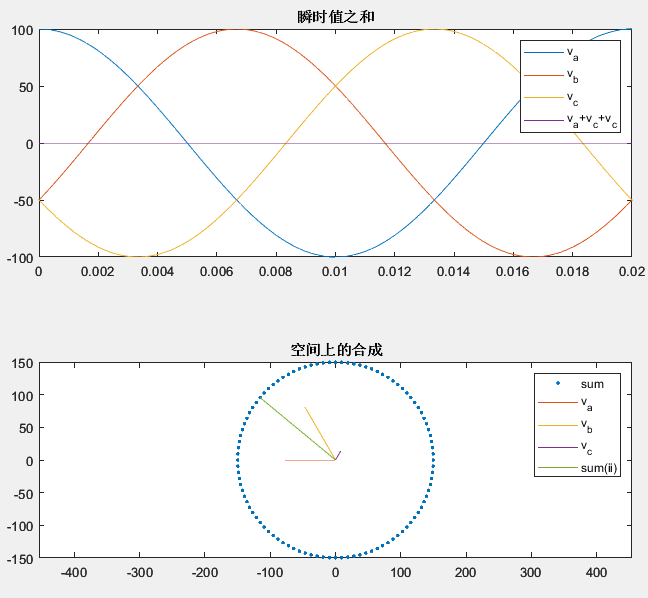
关于“为什么三相电压之和为0,却能合成一个旋转矢量”这个问题,用MATLAB简单画个图。代码注释里有大致的解释。
close
t = 0:0.2*1e-3:0.02;
f = 50;
% 三相电压,正序
va = 100*cos(2*pi*f*t);
vb = 100*cos(2*pi*f*t - 2*pi/3);
vc = 100*cos(2*pi*f*t + 2*pi/3);
% 三相电压被放置在空间上的不同位置
% 空间上的位置,令a相为0°
% b相超前a相120°,即位于2*pi/3
% c相滞后a相120°,即位于-2*pi/3
% 也就是说这三个矢量的方向不变,幅值随时间变化(幅值可以为负值)
% 后缀_c表示是矢量(复数),实部为在α轴上的投影,虚部为β轴上的投影
va_c = va;
vb_c = vb*cos(2*pi/3) + 1i*vb*sin(2*pi/3);
vc_c = vc*cos(-2*pi/3) + 1i*vc*sin(-2*pi/3);
v_sum = va_c + vb_c + vc_c; % 三个矢量的合成结果
subplot(2,1,1)
plot(t,va,t,vb,t,vc,t,va+vb+vc);
legend('v_a','v_b','v_c','v_a+v_c+v_c');
%可以看到在时间上,三相电压之和是0
subplot(2,1,2)
plot(real(v_sum),imag(v_sum),'.');
axis equal
hold on
% 三相电压在空间上错开120°,合成结果落在一个圆上,且半径为1.5倍的相电压幅值
% 这里画了某个时刻的三个矢量的合成结果
ii = 40;
plot([0,real(va_c(ii))],[0,imag(va_c(ii))]);
plot([0,real(vb_c(ii))],[0,imag(vb_c(ii))]);
plot([0,real(vc_c(ii))],[0,imag(vc_c(ii))]);
plot([0,real(v_sum(ii))],[0,imag(v_sum(ii))]);
legend('sum','v_a','v_b','v_c','sum(ii)');



![[230516] TPO71 | 2022年托福阅读真题第4/36篇 | Electrical Energy from the Ocean | 11:50](https://img-blog.csdnimg.cn/8cc0024f47ef42298d15d15e81a37178.png)