高通导航器软件开发包使用指南(15)
- 9 基本参数调整
- 9.1关键调谐参数
- 9.2调整过程
- 9.2.1传感器方向
- 9.2.2电子速度控制器(ESC)
- 9.2.3螺旋桨和电机特性
- 9.2.4指定车辆总质量的参数
- 9.2.5最小和最大推力命令
- 9.2.6推进器配置
- 9.2.7姿态控制增益
- 9.2.8电压警告阈值
- 9.2.9向下摄像头位置
- 9.3 已知限制
9 基本参数调整
本章包括修改车辆运行时参数的指南。这些运行时参数在snav_params中定义。xml配置文件,请参阅第2.4.3节。每个运行时参数必须使用snav_params中的正确参数组定义xml文件。
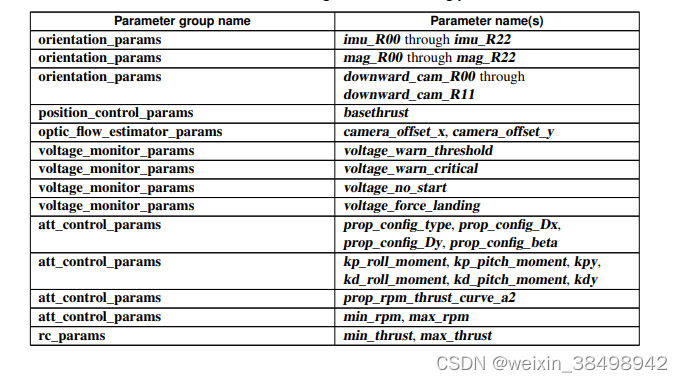
9.1关键调谐参数
表9-1列出了调整新车时需要调整的参数。如果需要,这些参数批评调整如下.
的参数说明见第8章
9.2调整过程
为新车型创建参数文件时,建议使用现有参数文件并修改所需参数。本节中的示例参数用于小型无人机样品重约240克,从发动机到发动机的距离为200毫米并使用直径为10cm的螺旋桨。
9.2.1传感器方向
必须使用orientation_params组中的参数。第一步需要定义车身坐标系统有关参数说明,请参见第8.21节。
9.2.2电子速度控制器(ESC)
调谐ESC软件不适用于普通电机和螺旋桨。ESC软件需要特定每个特定电机和螺旋桨组合的参数。如果使用新的螺旋桨或电机,ESC必须调整软件。ESC调谐过程目前必须由高通公司执行,具体待定用于将来的文档。
用于将来的文档。
9.2.3螺旋桨和电机特性
必须指定螺旋桨的推力与RPM之间的关系。使用二次方程式来指定这种关系。确定该曲线的数据可以用合适的螺旋桨进行实验测量试验台
使用att_control_params组中的以下参数指定曲线:
这些参数用于根据以下方程式定义单个螺旋桨曲线
提供推力(单位:克):
推力=a2∗ 每平方米+a1∗ rpm+a0。
prop_rpm_thrust_curve_a0和prop_rpm_thrust_ccurve_a1参数默认设置为0只需要指定prop_rpm_thrust_curve_a2。
小样本无人机螺旋桨的推力与RPM曲线规定如下:
还必须指定att_control_params组中的最大和最小RPM。最低限度使用最大和最小RPM值以及螺旋桨推力计算最大推力曲线总推力重量比至少为2:1是最佳性能的理想选择。小样本无人机的总推力如下:
<param name="min_rpm" value="5500"/>
<param name="max_rpm" value="16400"/>
9.2.4指定车辆总质量的参数
必须测量标称车辆起飞重量(单位:克)
position_control_params组必须基于该值设置。
对于小样本无人机
<param name="basethrust" value="240.0" />
9.2.5最小和最大推力命令
最小推力和最大推力指令必须与min_thrust和max_throst一起指定rc_params组中的参数。
小样本无人机的最小和最大推力值如下:
<param name=“min_thrust”value=“60.0”/>
<param name=“max_thrust”value=“460.0”/>
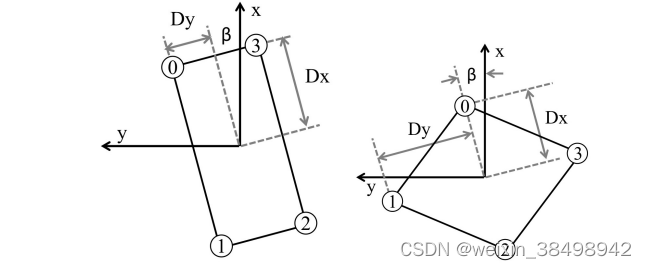
9.2.6推进器配置
必须指定相对于所选车身坐标系的螺旋桨配置。看见
第8.14节介绍了螺旋桨配置参数。
小样本无人机的参数如下:

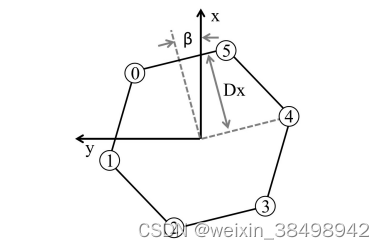
对于四转子,支持矩形和菱形配置。正六边形配置为支持六角转子。在图9-1和9-2中,坐标系表示车身框架协调。顶点处的数字表示ESC电机ID
9.2.7姿态控制增益
必须使用att_control_params中的以下参数调整姿态控制器增益组比例增益参数如下:
•kp_roll_mount
•kp_pitch_mont
•kpy
衍生收益参数如下:
•kd_roll_mount
•kd_pitch_mont
•kdy
有关这些参数的详细信息,请参见第8.14节。
姿态控制器的输出是指令的身体框架力矩或扭矩。比例增益增加作为姿态或角度误差的函数而产生的力矩。衍生收益增加作为角速度误差的函数而产生的力矩。
增加比例项会增加控制器的刚度,同时增加导数项增加了系统的阻尼。
侧倾和俯仰增益调整使用车辆惯性矩计算参数的初始值,如下所示:
kp_roll_mont=36.80*Ixx
kp_pitch_mont=36.80*Iyy
kd_roll_mont=4.261*Ixx
kd_pitch_mont=4.261*Iyy
注:可能需要对侧倾和俯仰增益进行微调
Ixx和Iyy是车身x和y轴的惯性矩值,单位为克*米2
.
可以使用机械CAD软件计算惯性矩值。这些收益导致姿态控制器稍微过阻尼,稳定时间约为0.4秒输入横摇角或俯仰角的变化。必须从初始参数值调整增益。将来文件将提供计算偏航姿态增益初始值的类似方法。
姿态控制器调整要创建一个反应灵敏且刚性的姿态控制器,请增加控制增益。收益也在增加这会导致高频振动和不稳定性。
为了确保系统在命令改变角度时不会振荡,增加导数利润。
姿态控制器增益调谐辅助装置有经验的调谐器使用各种标准来帮助调谐,例如:
•飞行模式和飞行状态
•车辆声音
•对不同幅度阶跃输入的响应
•飞行日志数据
•视觉表现
•从飞行控制日志文件收集的数据
小样本无人机示例
本示例使用CAD软件计算x和y惯性矩值,Ixx=0.623克米2 Iyy=0.678克米2
.
横滚和俯仰姿态增益在参数文件中计算和指定如下:
小样本无人机的偏航增益可手动调整并指定如下:
9.2.8电压警告阈值
收集电压放电曲线后,必须调整voltage_monitor_params中的参数飞行过程中的给定车辆和电池。必须调整参数,以便电压警告车灯亮起,车辆被迫在给定的剩余飞行时间内着陆车辆飞行。
小样本无人机的参数如下:
注:小样本无人机使用2电池LiPo电池。使用2芯LiPo电池的车辆应使用与上面列出的参数类似。使用3芯LiPo电池的车辆使用的参数约为比小样本无人机列出的参数大50%。
9.2.9向下摄像头位置
必须使用
optic_flow_estimulator_params组中的camera_offset_x和camera_ooffset_y参数。
这些参数见第8.4节。
9.3 已知限制
-
如果X轴和Y轴的惯性矩相差很大,车辆可能不会表现良好。
-
所有可调整参数的指南不在本文件的范围内。
-
调整新电机或螺旋桨ESC软件的方法待定




![[附源码]Python计算机毕业设计SSM课程教学质量综合分析平台(程序+LW)](https://img-blog.csdnimg.cn/629e04e7892b4f03bc0e4f81af81c91e.png)