论文信息
题目:
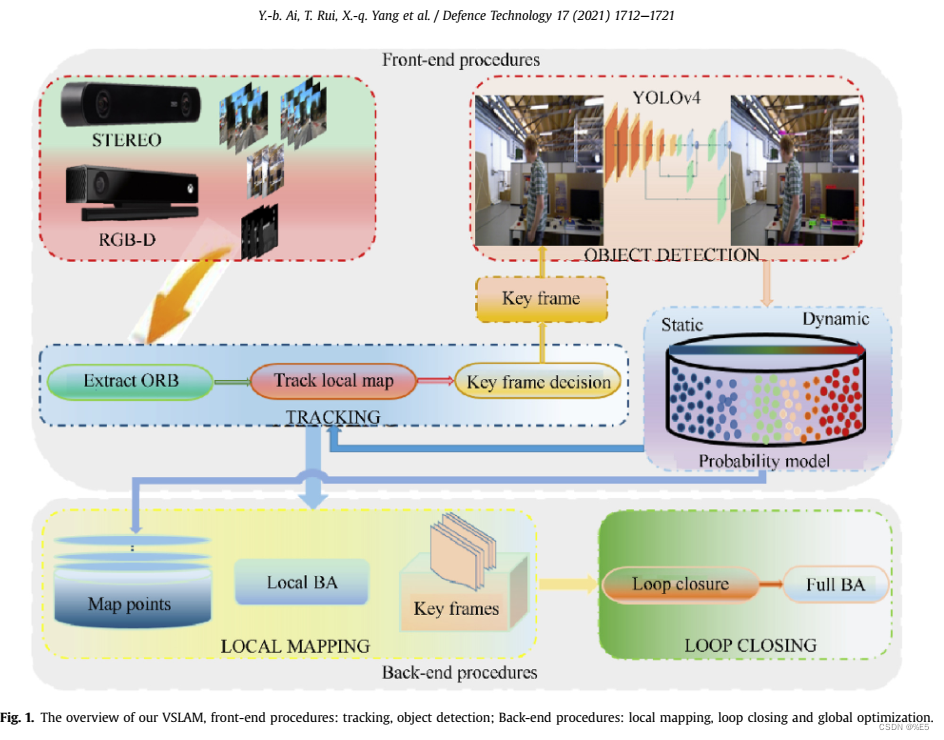
Visual SLAM in dynamic environments based on object detection
基于目标检测的动态环境下的视觉SLAM
论文地址:
https://www.sciencedirect.com/science/article/pii/S2214914720304402
发表期刊:
Defence Technology,(2区)
标签
xxxx
摘要
大量的视觉同步定位与映射(VSLAM)系统需要假设环境中的静态特征。然而,运动物体会极大地影响基于静态世界假设的VSLAM系统的性能。为解决这一难题,提出了一种基于ORB-SLAM2的动态环境实时鲁棒VSLAM系统。为了减少动态内容的影响,我们将基于深度学习的目标检测方法引入到视觉里程计中,然后加入动态目标概率模型,提高深度神经网络的目标检测效率,增强系统的实时性。在TUM和KITTI基准数据集以及实际环境中进行的实验结果表明,我们的方法可以显著减少跟踪误差或漂移,提高动态场景下VSLAM系统的鲁棒性、准确性和稳定性
内容简介
我们提出了一种动态环境下的视觉SLAM方法,该方法将基于深度学习的目标检测技术与动态目标概率模型相结合,有效准确地区分场景的静态和动态区域。实验验证了该算法在动态场景下的准确性和鲁棒性。本文的主要贡献如下:提出了一种基于ORB-SLAM2和目标检测相结合的SLAM框架,以减少运动目标对相机姿态估计和密集三维点云映射的影响。深度目标检测方法作为预处理阶段,过滤出与动态目标或静态目标相关的数据。为了提高VSLAM系统中动态目标与静态场景的分离能力,提出了一种新的动态目标概率模型。计算每个关键帧点的概率,在SLAM的跟踪线程中更新和传播特征点和地图点的移动概率。
评价
chatgpt分析
根据您提供的论文信息,以下是我为您提炼出的关键信息:
论文标题:基于ORB-SLAM2的实时动态环境下的视觉SLAM系统
- 方法:
- 基于ORB-SLAM2框架
- 深度学习的对象检测(用于动态目标检测)
- 动态对象概率模型(用于区分静态和动态场景)
- 创新点:
- 将深度学习的对象检测与动态对象概率模型结合,以在动态环境中提高SLAM系统的准确性和稳定性
- 在跟踪线程中实时更新和传播动态对象概率
- 论文大纲:
- 摘要
- 引言
- 相关工作
- 系统框架
- 方法论
- 实验结果分析
- 结论
- 优点:
- 在动态环境中,相较于传统SLAM方法具有更高的准确性和稳定性
- 有效区分静态和动态区域,减少动态目标对相机位姿估计的影响
- 缺点:
- 对象检测依赖于有监督的深度学习方法,当训练场景与实际场景差异较大时,性能可能会受到影响
- 可能的创新点:
- 使用自监督或无监督的深度学习方法来改进对象检测
- 结合其他传感器数据(如IMU)以提高位姿估计的稳定性
- 优化计算效率,以实现在低功耗设备上的实时运行
关于撰写一篇基于视觉的动态SLAM论文,您可以考虑以下方向:
- 在现有的动态SLAM框架基础上,引入新的深度学习方法或传感器数据融合,以提高系统的性能
- 研究不同场景下的动态目标特征,优化对象检测和概率模型
- 开发新的优化算法或者数据结构,提高系统的实时性和计算效率
- 对比现有的动态SLAM方法,证明您的方法在特定应用场景下具有优势
在完成论文撰写过程中,我会根据您的需求和问题,提供帮助和建议。
阅读总结
论文针对的问题:
1、动态场景:处理动态物体过多的场景,并不是单一的动态目标剔除
2、实时性: 采用的是目标检测算法,yolo v4 能够快速实现响应
论文采用的方法:
1、动态目标检测+移动概率传播:动态目标检测可以初始化移动概率,然后利用几何约束传播移动概率
移动概率传播解释:
移动概率传播是一种在视觉SLAM系统中处理动态环境的方法,它主要通过为特征点分配动态概率来区分静态和动态特征。以下是对移动概率传播过程的更详细解释:
-
初始化动态概率:在跟踪线程中,为每个检测到的特征点分配一个初始的动态概率,表示该特征点属于动态对象的可能性。
-
动态概率更新:在后续帧中,系统会根据特征点的表现来更新动态概率。例如,如果一个特征点在多个连续帧中与相机的运动模型不符,那么它的动态概率将增加。这意味着它更可能属于动态对象。
-
动态特征过滤:根据动态概率,将具有高动态概率的特征点标记为动态特征。这些动态特征将不会用于位姿估计和地图构建过程,从而减少动态对象对SLAM系统的影响。
-
概率传播:动态概率不仅限于跟踪线程,还需要传播到系统的其他部分,如局部地图构建和闭环检测。这样,整个系统都能够根据动态概率来调整其处理策略,更好地应对动态环境中的挑战。
总之,移动概率传播方法通过为特征点分配和更新动态概率,帮助视觉SLAM系统区分静态和动态特征。这种方法在处理动态环境时能提高位姿估计的准确性和地图构建的稳定性。