PPO算法
近线策略优化算法(Proximal Policy Optimization Algorithms) 即属于AC框架下的算法,在采样策略梯度算法训练方法的同时,重复利用历史采样的数据进行网络参数更新,提升了策略梯度方法的学习效率。 PPO重要的突破就是在于对新旧新旧策略器参数进行了约束,希望新的策略网络和旧策略网络的越接近越好。 近线策略优化的意思就是:新策略网络要利用到旧策略网络采样的数据进行学习,不希望这两个策略相差特别大,否则就会学偏。PPO依然是openai在2017年提出来的,论文地址
PPO-clip的损失函数,其中损失包含三个部分:
- clip部分:加权采样后的优势值越好(可理解层价值网络的评分),同时采样通过clip防止新旧策略网络相差过大
- VF部分: 价值网络预测的价值和环境真是的回报值越接近越好
- S 部分:策略网络输出策略的熵值,越大越好,这个explore的思想,希望策略网络输出的动作分布概率不要太集中,提高了每个动作都有机会在环境中发生的可能。
实战部分
导入必要的包
%matplotlib inline
import matplotlib.pyplot as plt
from IPython import display
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torch.distributions import Categorical
from tqdm.notebook import tqdm
准备环境
准备好openai开发的LunarLander-v2的游戏环境。
seed = 543
def fix(env, seed):
env.action_space.seed(seed)
torch.manual_seed(seed)
np.random.seed(seed)
random.seed(seed)
import gym
import random
env = gym.make('LunarLander-v2' ,render_mode='rgb_array')
fix(env, seed) # fix the environment Do not revise this !!!
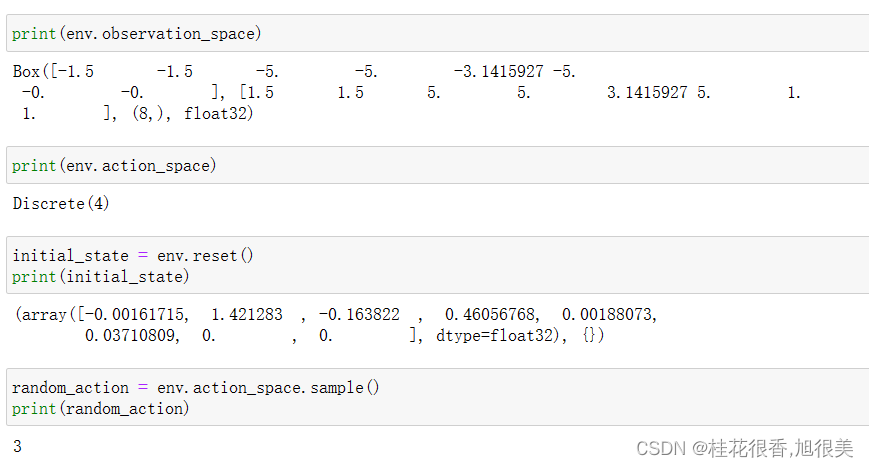
下面是采用代码去输出 环境的 观测值,一个8维向量,动作是一个标量,4选一。
- 该环境共有 8 个观测值,分别是: 水平坐标 x; 垂直坐标 y; 水平速度; 垂直速度; 角度; 角速度; 腿1触地; 腿2触地;
- 可以采取四种离散的行动,分别是: 0 代表不采取任何行动 1.代表主引擎向左喷射 2 .代表主引擎向下喷射 3 .代表主引擎向右喷射
- 环境中的 reward 大致是这样计算: 小艇坠毁得到 -100 分; 小艇在黄旗帜之间成功着地则得 100~140 分; 喷射主引擎(向下喷火)每次 -0.3 分; 小艇最终完全静止则再得 100 分
随机动作玩5把
env.reset()
img = plt.imshow(env.render())
done = False
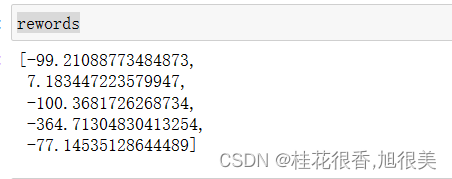
rewords = []
for i in range(5):
env.reset()[0]
img = plt.imshow(env.render())
total_reward = 0
done = False
while not done:
action = env.action_space.sample()
observation, reward, done, _ , _= env.step(action)
total_reward += reward
img.set_data(env.render())
display.display(plt.gcf())
display.clear_output(wait=True)
rewords.append(total_reward)
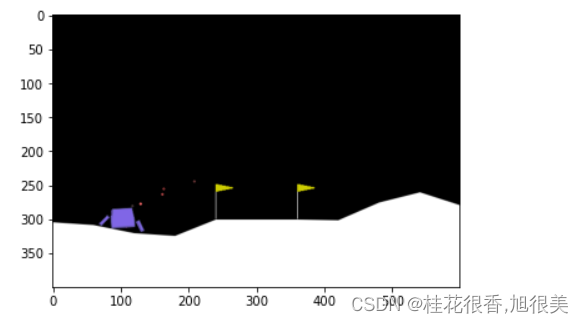
只有一把分数是正的,只有一次平安落地,小艇最终完全静止
搭建PPO agent
class Memory:
def __init__(self):
self.actions = []
self.states = []
self.logprobs = []
self.rewards = []
self.is_terminals = []
def clear_memory(self):
del self.actions[:]
del self.states[:]
del self.logprobs[:]
del self.rewards[:]
del self.is_terminals[:]
class ActorCriticDiscrete(nn.Module):
def __init__(self, state_dim, action_dim, n_latent_var):
super(ActorCriticDiscrete, self).__init__()
# actor
self.action_layer = nn.Sequential(
nn.Linear(state_dim, 128),
nn.ReLU(),
nn.Linear(128, 64),
nn.ReLU(),
nn.Linear(64, action_dim),
nn.Softmax(dim=-1)
)
# critic
self.value_layer = nn.Sequential(
nn.Linear(state_dim, 128),
nn.ReLU(),
nn.Linear(128, 64),
nn.ReLU(),
nn.Linear(64, 1)
)
def act(self, state, memory):
state = torch.from_numpy(state).float()
action_probs = self.action_layer(state)
dist = Categorical(action_probs)
action = dist.sample()
memory.states.append(state)
memory.actions.append(action)
memory.logprobs.append(dist.log_prob(action))
return action.item()
def evaluate(self, state, action):
action_probs = self.action_layer(state)
dist = Categorical(action_probs)
action_logprobs = dist.log_prob(action)
dist_entropy = dist.entropy()
state_value = self.value_layer(state)
return action_logprobs, torch.squeeze(state_value), dist_entropy
class PPOAgent:
def __init__(self, state_dim, action_dim, n_latent_var, lr, betas, gamma, K_epochs, eps_clip):
self.lr = lr
self.betas = betas
self.gamma = gamma
self.eps_clip = eps_clip
self.K_epochs = K_epochs
self.timestep = 0
self.memory = Memory()
self.policy = ActorCriticDiscrete(state_dim, action_dim, n_latent_var)
self.optimizer = torch.optim.Adam(self.policy.parameters(), lr=lr, betas=betas)
self.policy_old = ActorCriticDiscrete(state_dim, action_dim, n_latent_var)
self.policy_old.load_state_dict(self.policy.state_dict())
self.MseLoss = nn.MSELoss()
def update(self):
# Monte Carlo estimate of state rewards:
rewards = []
discounted_reward = 0
for reward, is_terminal in zip(reversed(self.memory.rewards), reversed(self.memory.is_terminals)):
if is_terminal:
discounted_reward = 0
discounted_reward = reward + (self.gamma * discounted_reward)
rewards.insert(0, discounted_reward)
# Normalizing the rewards:
rewards = torch.tensor(rewards, dtype=torch.float32)
rewards = (rewards - rewards.mean()) / (rewards.std() + 1e-5)
# convert list to tensor
old_states = torch.stack(self.memory.states).detach()
old_actions = torch.stack(self.memory.actions).detach()
old_logprobs = torch.stack(self.memory.logprobs).detach()
# Optimize policy for K epochs:
for _ in range(self.K_epochs):
# Evaluating old actions and values : 新策略 重用 旧样本进行训练
logprobs, state_values, dist_entropy = self.policy.evaluate(old_states, old_actions)
# Finding the ratio (pi_theta / pi_theta__old):
ratios = torch.exp(logprobs - old_logprobs.detach())
# Finding Surrogate Loss:计算优势值
advantages = rewards - state_values.detach()
surr1 = ratios * advantages ### 重要性采样的思想,确保新的策略函数和旧策略函数的分布差异不大
surr2 = torch.clamp(ratios, 1-self.eps_clip, 1+self.eps_clip) * advantages ### 采样clip的方式过滤掉一些新旧策略相差较大的样本
loss = -torch.min(surr1, surr2) + 0.5*self.MseLoss(state_values, rewards) - 0.01*dist_entropy
# take gradient step
self.optimizer.zero_grad()
loss.mean().backward()
self.optimizer.step()
# Copy new weights into old policy:
self.policy_old.load_state_dict(self.policy.state_dict())
def step(self, reward, done):
self.timestep += 1
# Saving reward and is_terminal:
self.memory.rewards.append(reward)
self.memory.is_terminals.append(done)
# update if its time
if self.timestep % update_timestep == 0:
self.update()
self.memory.clear_memory()
self.timstamp = 0
def act(self, state):
return self.policy_old.act(state, self.memory)
训练PPO agent
state_dim = 8 ### 游戏的状态是个8维向量
action_dim = 4 ### 游戏的输出有4个取值
n_latent_var = 256 # 神经元个数
update_timestep = 1200 # 每多少补跟新策略
lr = 0.002 # learning rate
betas = (0.9, 0.999)
gamma = 0.99 # discount factor
K_epochs = 4 # update policy for K epochs
eps_clip = 0.2 # clip parameter for PPO 论文中表明0.2效果不错
random_seed = 1
agent = PPOAgent(state_dim ,action_dim,n_latent_var,lr,betas,gamma,K_epochs,eps_clip)
# agent.network.train() # Switch network into training mode
EPISODE_PER_BATCH = 5 # update the agent every 5 episode
NUM_BATCH = 200 # totally update the agent for 400 time
avg_total_rewards, avg_final_rewards = [], []
# prg_bar = tqdm(range(NUM_BATCH))
for i in range(NUM_BATCH):
log_probs, rewards = [], []
total_rewards, final_rewards = [], []
values = []
masks = []
entropy = 0
# collect trajectory
for episode in range(EPISODE_PER_BATCH):
### 重开一把游戏
state = env.reset()[0]
total_reward, total_step = 0, 0
seq_rewards = []
for i in range(1000): ###游戏未结束
action = agent.act(state) ### 按照策略网络输出的概率随机采样一个动作
next_state, reward, done, _, _ = env.step(action) ### 与环境state进行交互,输出reward 和 环境next_state
state = next_state
total_reward += reward
total_step += 1
rewards.append(reward) ### 记录每一个动作的reward
agent.step(reward, done)
if done: ###游戏结束
final_rewards.append(reward)
total_rewards.append(total_reward)
break
print(f"rewards looks like ", np.shape(rewards))
if len(final_rewards)> 0 and len(total_rewards) > 0:
avg_total_reward = sum(total_rewards) / len(total_rewards)
avg_final_reward = sum(final_rewards) / len(final_rewards)
avg_total_rewards.append(avg_total_reward)
avg_final_rewards.append(avg_final_reward)
PPO agent在玩5把游戏
fix(env, seed)
agent.policy.eval() # set the network into evaluation mode
test_total_reward = []
for i in range(5):
actions = []
state = env.reset()[0]
img = plt.imshow(env.render())
total_reward = 0
done = False
while not done :
action= agent.act(state)
actions.append(action)
state, reward, done, _, _ = env.step(action)
total_reward += reward
img.set_data(env.render())
display.display(plt.gcf())
display.clear_output(wait=True)
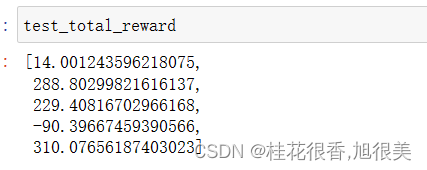
test_total_reward.append(total_reward)
从下图可以看到,玩得比随机的时候要好很多,有三把都平安着地,小艇最终完全静止。
其中有3把得分超过200,证明ppo在300轮已经学到了如何玩这个游戏,比之前的随机agent要强了不少。
github 源码
参考
ChatGPT的强化学习部分介绍
基于人类反馈的强化学习(RLHF) 理论
Anaconda安装GYM &关于Box2D安装的相关问题
conda-forge / packages / box2d-py
jupyter Notebook 内核似乎挂掉了,它很快将自动重启